基于广义回归神经网络的高速公路减速带行车风险检测模型
2021-05-20王广川
王广川
(中冶(贵州)建设投资发展有限公司 贵阳市 550000)
0 引言
交通安全是社会管理领域的重要组成部分[1],90%的交通事故是由驾驶员的冒险行为造成的。速度是交通安全中最重要的因素之一,因为高速会增加撞车风险和更严重的伤害[2]。在本研究中,驾驶风险的状态是减速区内的行为,容易造成不良后果。车辆运动的参数通常是车速、加速度和车辆轨迹[3]。可以通过观察车辆运动参数来识别驾驶风险。检测模型的准确性是一个关键因素[4]。因此,建立一个高精度的神经网络模型来识别驾驶风险。基于广义回归神经网络模型对高速公路减速区驾驶风险检测进行研究,旨在降低事故发生率,保障驾驶员安全。
1 驾驶风险的影响因素分析
现有研究表明,影响驾驶员驾驶能力的主要因素有三个:
(1)疲劳导致驾驶员身体机能失衡。
(2)由于外界因素的干扰,分心驾驶使司机很难集中注意力。
(3)驾驶员受到暂时性伤害,如驾驶员实际工作能力下降,药物和酒精的副作用。
车辆在减速区的状态是驾驶员操纵车辆情况的具体表现,它可以确定驾驶员是否处于危险状态。驾驶员在危险情况下的一个重要特征是操作车辆的反应时间增加。处于危险驾驶条件下的驾驶员通常会对突然的速度制动做出反应,以降低车辆的速度。此外,当车辆行驶通过减速区时,如果没有低于规定速度,这也是危险的驾驶状态。因此,通过车辆运动参数来检测驾驶员的状态是有效的。
为了建立驾驶风险的检测模型,初步选择反应时间、加速度、初始速度、最终速度和速度差五个指标作为危险驾驶评估的表征指标。详情见表1。根据减速区的特点,我们设计了危险驾驶状态的检测流程,如图1所示。

表1 驾驶风险表征指标集
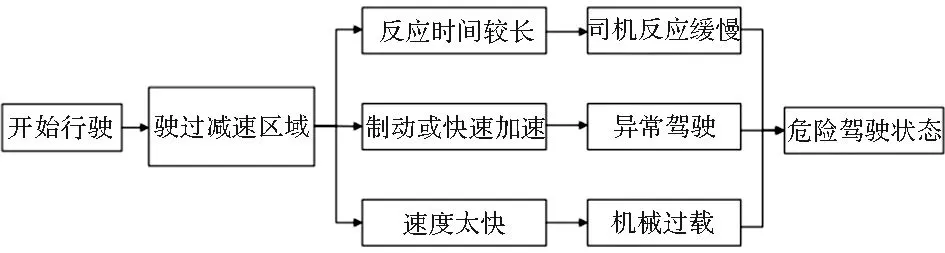
图1 危险驾驶状态的检测过程
2 实验测试和数据优化
本实验的目的是收集减速区内驾驶员和车辆的数据,如加速度、反应时间、初始速度、最终速度和速度差。
2.1 实验实施过程
基于实验目的,我们通过模拟驾驶实验开发了一套综合数据采集程序。我们选择模拟驾驶平台中的高速公路减速区场景作为典型路段,模拟驾驶平台包含多个用于采集行为和车辆信号的传感器,应用于各种驾驶行为实验。
有四种驾驶状态:“正常驾驶”“超速驾驶”“分心驾驶”和“疲劳驾驶”。每个驾驶员在四种驾驶条件下继续接受大约30min的测试。实验设备实时采集驾驶员的生理信息、车辆运行参数和驾驶环境信息。驾驶员控制模拟驾驶平台完成根据实验操作过程的要求进行自然操作,多个传感器采集所需的五个指标,即初始速度V1、最终速度VF、速度差△V,反应时间T,加速度a。
实验完成后,总结每个驾驶员的特征、车辆运行状态、驾驶环境等数据,建立高速公路减速区驾驶实验数据库,完成检测模型。
2.2 有效数据提取
根据实验方案,我们需要通过多个传感器获得五个原始参数的信息。在获得上述样本数据后,可以根据式(1)、式(2)和式(3)计算反应时间,经过以上处理,我们可以得到上述五个所需的指标。
tR=t2-t1
(1)
ΔV=VF-V1
(2)
(3)
在这个模拟实验中,每个驾驶员必须执行三个正常驾驶过程和三个危险驾驶过程。危险驾驶过程分为超速驾驶、分心驾驶和疲劳驾驶。对于正常行驶,我们规定行驶速度不能超过高速公路相关路段的限速值。对于危险驾驶,由于模拟特点和实验操作中的误差,我们也剔除了无效数据。数据的组成如表2所示。
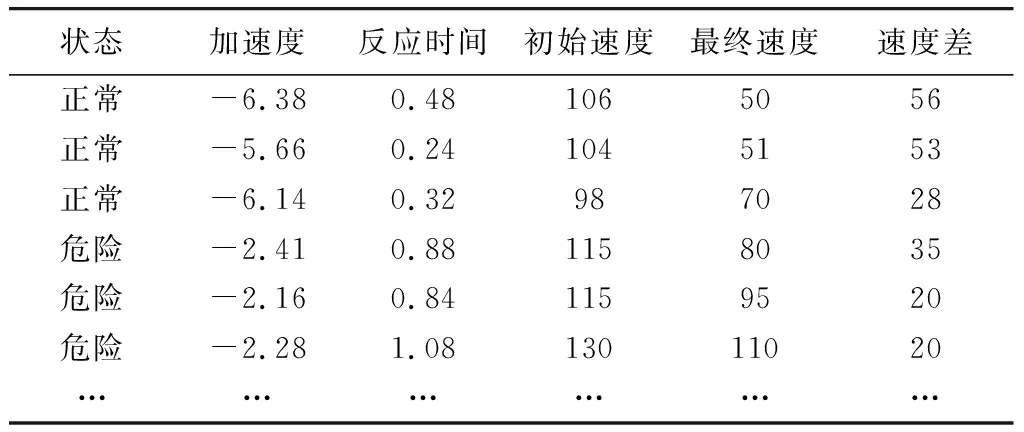
表2 部分原始样本数据
在本实验中,我们从31名驾驶员那里获得了60多个小时的数据,并采用均匀抽样的方法提取了正常和危险状态下的332组有效数据。具体来说,训练集中有266个样本,其中133个样本分别处于正常状态和危险状态;测试集中有66个样本,其中33个样本分别处于正常状态和危险状态。
2.3 最佳表征筛选
表2是基于多个传感器的原始数据集,每组数据包含加速度、反应时间、初始速度、最终速度和速度差五个指标。检验五个指标在正常和危险状态下是否有显著差异,选出被检验的指标作为驾驶风险的最佳指标。测试结果见表3。
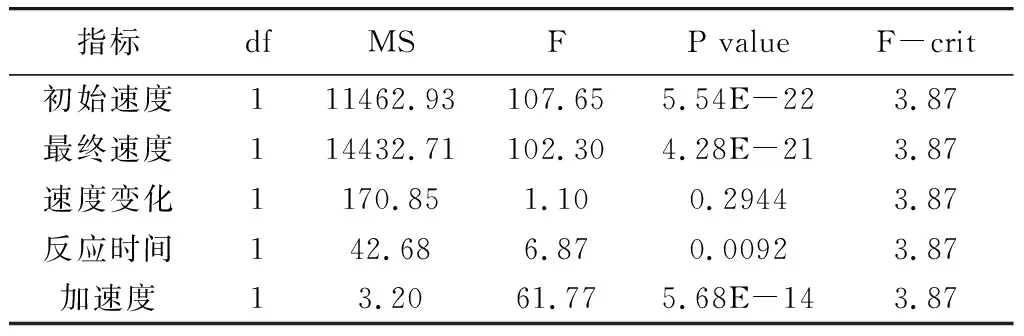
表3 各项指标的方差分析结果
表3中的分析结果表明,在正常和危险状态之间,初始速度、最终速度、反应时间和加速度存在显著差异(P<0.05)。也就是说以上四个指标都可以作为驾驶风险的理想指标。然而速度差没有通过方差分析测试。因此,加速度、反应时间、初始速度和最终速度这四个指标将被用作驾驶风险检测模式识别的指标。
3 基于广义回归神经网络的驾驶风险检测模型
3.1 经典GRNN的结构
在许多非线性模型中,人工神经网络模型因其良好的自适应能力而得到广泛应用[5]。此外,在实际建模和计算中,广义回归神经网络比其他非线性模型具有更高的预测精度和更快的计算速度。GRNN是基于非线性回归理论的前馈神经网络模型,结构由四层组成,即输入层、模式层、求和层和输出层,如图2所示。

图2 广义回归神经网络的经典结构
输入矩阵是X = [ x1,x2,…,xn]T,输出矩阵是Y = [ y1,y2,…,yn]T。神经元的数量等于训练样本中输入矩阵的维数。输入层只将样本变量发送到模式层,不参与实际操作。模式层神经元的数量等于训练集样本的数量,层神经元传递函数为:
(4)
求和层使用两种类型的神经元来表示所有模式层神经元的线。模式层和每个神经元的连接权重为1,第一类求和函数为:
(5)
第二类加权所有模式层的神经元,模式层与每个神经元之间的连接权值作为训练集的输出矩阵,第二类求和函数为:
(6)
输出层中的每个神经元都与求和层的两种类型的结果相关联。输出函数是:
(7)
3.2 广义回归神经网络的算法过程
(1)生成训练集和测试集
我们使用随机方法来生成训练集和测试集。如上所述,实验数据包括驾驶状态的类别(正常驾驶和危险驾驶)和四个指示器(加速度、反应时间、初始速度和最终速度)。一些样本数据如表4所示。训练集中有266个样本,测试集中有66个样本。
(2)创建用于驱动风险的GRNN模型组
我们使用MATLAB神经网络的工具箱函数“newgrnn”来创建GRNN模型,建立了四个变量的总组合。将其分为15组,每个模型单独构建。例如:模型1中输入层的变量是初始速度,模型2中输入层的变量是初始速度和最终速度(应为反应时

表4 训练集和测试集的样本数据
间)。输入变量的组合如图3所示,对应于15个广义回归神经网络模型。
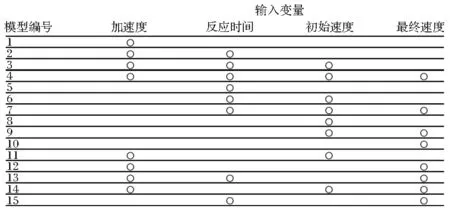
图3 输入对应于15个模型的变量组合
(3)模拟测试
驾驶风险的GRNN模型建立后,可以将测试集的输入矩阵纳入模型,模型的输出即为相应的预测结果。
(4)性能赋值
通过计算测试集的预测类别和实际类别之间的误差,可以评价广义回归神经网络模型对驾驶风险的泛化能力。同时,MATLAB函数“cputime”可以用来计算程序的运行时间,即衡量程序的运行速度和性能。
3.3 结果讨论
由于训练集和测试集是随机生成的,所以每次计算的结果略有不同。某些程序操作的结果是随机选择的,因此模型组的预测精度、运行时间和最优模型测试结果分别显示在图4、图5、图6中。
(1)从图4可以看出,广义回归神经网络模型具有良好的泛化能力,测试集的最佳预测准确率高达86.4%
(2)从图4可以看出,单独输入每个变量建立的广义回归神经网络模型的数量为模型1、模型5、模型8和模型10,其中,仅由加速度建立的广义回归神经网络模型性能最差,而正确率只有59%。分别输入反应时间、初始速度和最终速度的广义回归
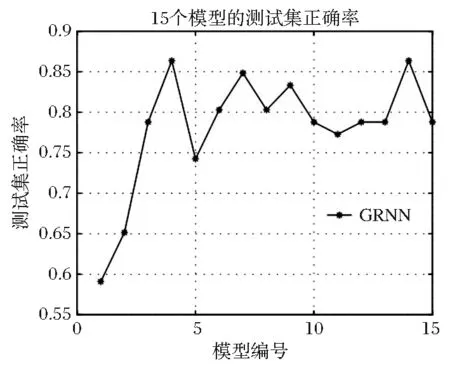
图4 15个模型的预测精度

图5 15个模型的运行时间

图6 模型4的预测结果
神经网络模型具有更好的性能,正确率分别为74%、80%和79%。这说明加速度和车辆运动之间的相关性很小,但是初始速度、最终速度、反应时间和车辆运动之间的相关性很大。
(3)在图4中,模型1的输入变量是加速度,模型2的输入变量是加速度和反应时间,模型3的输入变量是加速度、反应时间和初始速度,模型4的输入变量是加速度、反应时间、初始速度和最终速度。从图3可以看出,从模型1到模型4,预测精度逐渐提高,同样的规则也适用于模型5~模型7和模型8~模型9,这表明多种因素有助于对驾驶状态的识别。输入变量的数量与预测准确率正相关。
(4)从图5可以看出,15个模型的平均运行时间约为0.2s,比BP神经网络算法快得多
(5)图6中测试集预测表明模型4对应驾驶风险检测结果最优值,是一个典型的涉及四个参数的运行模型。模型4的预测精度为86.4%,高于其他模型。
4 结论
交通事故是对社会生活有负面影响的问题之一。由于旅行次数增加,它对人们的生活产生了负面影响。它不仅会威胁个人健康,还会因为经济损失而扰乱管理系统。
本研究旨在建立高速公路减速区行驶风险检测模型。在本研究中,考虑提高广义回归神经网络模型的预测精度。这四个参数是通过方差分析选择的,很明显,输入变量的数量与预测准确率正相关。因此提出了15个模型来选择最佳预测模型,将广义回归神经网络模型用于车辆运动检测,可以显著降低驾驶风险。
