电控锥盘式蔬菜播种机设计与试验
2021-05-19王方艳孙光全
王方艳 孙光全 张 钦
(青岛农业大学机电工程学院, 青岛 266109)
0 引言
蔬菜播种作业不仅人工劳动强度大、播种精度控制难,而且耗时费工、劳动成本高,因此迫切需要实现机械化播种[1]。蔬菜播种机主要包括机械式和气力式两种[2]。通常采用种子丸粒化技术来规范种子尺寸,从而保证机械化播种过程中的充种、携种和排种精度及准确性;采用种绳编织方法保证机械化播种株距,从而解决种子形状不规则及质量小、机械化播种效果不稳定的问题;采用气力播种技术适应种子外形及尺寸,从而提高单粒播种精度及播种适应性。但丸粒化技术和种绳编织方法都增加了蔬菜的制种成本,气力播种技术增大了播种机的制造成本。因此,降低播种成本、提高播种质量是实现蔬菜机械化播种的关键。研究蔬菜精密播种技术及研发裸种播种设备对推动蔬菜机械化生产具有重要意义。
国外对蔬菜播种技术及装备的研究起步较早,其自动化、智能化水平较高[3]。欧美发达国家以适于大田作业的气力式播种设备为主,其配套动力大、销售价格高,可实现开沟、播种、覆土、施肥等多种功能,且通过更换播种盘可适应不同的蔬菜种子,如马斯奇奥的气力式播种机。日韩以中小型动力配套的机械式播种机为主,其整机结构紧凑、轻巧,多适于种子丸粒后的播种,如矢崎SYV-M600W蔬菜播种机,但窝眼轮式排种器型孔较小,易被灰尘及杂质堵塞。国外播种机具价格高、播种成本高,并未在我国大面积推广应用。我国对蔬菜播种技术及装备的研究起步较晚,在引进消化国外先进技术的基础上,研制了多种中小型蔬菜播种设备,但播种理论及技术不够成熟,播种设备的性能及通用性还有待提高[4]。德易播农机公司生产的DB系列蔬菜播种机采用尼龙窝眼轮式排种器,具有良好的通用性,但存在窝眼堵塞、种子破碎及易漏播的问题,不适于高速工况[5-6]。青岛大顺精锋公司研发的DS-3S型精量播种机采用种绳播种机构,其作业速度可达8.3 km/h,播种效率高,但需提前对种子进行包衣、缠绳,成本相对较高,且需播种后浇水,播种精度由缠绳种子间距决定[7]。青岛农业大学研制的气力式蔬菜精量播种机通过更换排种盘来适应不同蔬菜种子的播种要求,采用电机驱动排种盘从而调整播种株距,但价格高于机械式播种机。目前,我国蔬菜播种机研究已取得一定进展,但多样的种植条件及种子特性对蔬菜小株距、浅播深的精密播种提出了更高的要求。为此本文提出电控锥盘式蔬菜播种机,以期实现白菜、菠菜等裸种的低成本、精密、高效播种。
1 整机结构与工作原理
电控锥盘式蔬菜播种机由汽油发动机提供动力,采用手扶导向前进的工作方式,主要由镇压轮、开沟覆土器、地轮、旋转编码器、汽油发动机、减速器、机架、排种管、锥盘排种器、直流电机、供种器、扶手、机架、闭环控制系统等组成。整机结构如图1所示。
作业时,根据蔬菜种子的播种要求,在闭环控制系统中设置株距。旋转编码器分别检测前轮动力输入轴与排种轴的转速,并反馈至闭环控制系统。针对不同前进速度,闭环控制系统调节供种器转速及锥盘排种器转速,实现前进速度与排种速度匹配,实现播种精度控制。播种时,发动机提供动力驱动前轮前进,操作人员辅助导向,并控制前进速度。直流电机为供种器及锥盘排种器的旋转提供动力。种子由供种器连续落入锥盘排种器,沿着锥盘面均匀散落至锥盘的种环槽内,伴随锥盘的转动被推种器推入排种管内,然后经排种管掉落到滑刀开沟器开好的种沟内,完成播种过程。该机可以更换不同型孔尺寸的排种盘,实现多种蔬菜的播种作业。整机技术参数如表1所示。
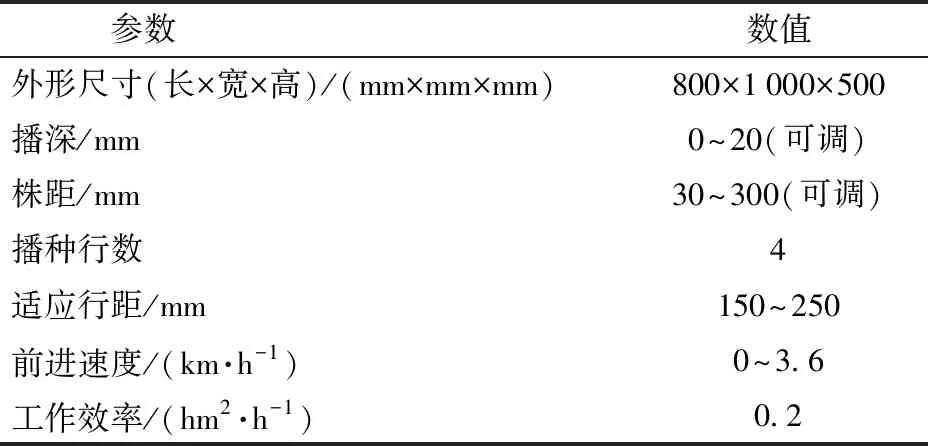
表1 技术参数Tab.1 Technical parameters
2 传动及控制系统
2.1 传动系统
汽油发动机为机具的前进提供动力,直流电机为供种器及锥盘排种器的转动提供动力。其中,汽油发动机动力通过带传动、减速器、链传动后,带动机具前进。直流电机一路动力经链传动带动供种器转动,另一路动力经锥齿轮转向带动锥盘排种器转动。传动系统原理图如图2所示。
该机行驶动力消耗主要包括行走功率和开沟功率。其中,行走功率P1和开沟功率P2满足[8-9]
(1)
P2=Fvm/1 000
(2)
式中f——滚动阻力系数
m——机具质量,kg
η1——传动效率
F——开沟阻力,N
g——重力加速度,m/s2
vm——机具前进速度,m/s
通常滚动阻力系数f为0.085~0.17,传动效率η1为0.8~0.9,单个滑刀开沟器工作阻力为200~400 N[10],人步行速度为1.6~2.5 km/h,机具质量约200 kg。取滚动阻力系数f=0.1,传动效率η1=0.9,单个滑刀开沟器工作阻力F=400 N进行计算,机具前进速度为0.7 m/s,则4行播种机的行驶驱动功率约为1.27 kW。
直流电机功率由供种器工作功率P3和锥盘排种器工作功率P4组成,且满足[11]
(3)
(4)
式中τ1——供种轴阻力矩,N·m
τ2——排种轴阻力矩,N·m
n1——供种器转速,r/min
n2——锥盘转速,r/min
η2、η3——传动效率
参照水平圆盘排种器,排种器的极限线速度为0.30~0.35 m/s[10],转轴阻力扭矩不超过10 N·m,经预试验选定排种盘极限转速为170 r/min,确定电机功率为356 W。
2.2 闭环控制系统
闭环控制系统由主控制器、速度检测模块、触摸屏、电机驱动模块等组成。考虑机具田间工作环境的复杂性及振动、粉尘的影响,选用抗干扰性强、可靠性高、维护方便的ZK3U型PLC。采用24 V直流电源,通过航空插头联接电路各模块,利用DC-DC技术供电。闭环控制系统框图如图3所示。
机具驱动轮的棱条结构增加了其与地面的摩擦因数,避免了机具行进打滑。根据操作员的行走速度,设定播种机的前进速度为0~2.5 km/h,得出锥盘排种器回转一周的时间为3~28.5 s,选用80BL100S40-445TK9型直流电机控制排种器及供种器转速。工作时,通过2个旋转编码器实时获取机具前进速度及锥盘排种器的回转速度,借助闭环控制系统控制电机转速,实现播种速度与前进速度的实时匹配。
3 关键部件设计
3.1 锥盘排种器
锥盘排种器是蔬菜直播机的核心部件,直接影响机具的播种效果,主要包括锥盘、分种螺帽、推种器、固定架、壳体等,结构如图4所示。工作时,种子从供种器落到锥盘后顺着锥盘面呈放射状滑落入凹形结构的种槽环内,并由刮种板刮掉多余的种子,保证种子单粒排序及充种。推种器固定在壳体上,利用锥盘转动和推种器滚动使种子在固定位置落种,实现种子的主动排种。
3.1.1种子运动特性
供种器的种子流经分种盖沿锥盘面滑落时,锥盘处于匀速回转状态,使得种子的运动状态复杂。以锥面上任意下落的单粒种子为研究对象,建立如图5所示坐标系。
种子受力包括滑动摩擦力Ff、空气阻力Fh、离心力FL、科氏力Fk、支承力FN、种子间作用力P及重力G。因种子间的相互作用力P方向和大小随时变化,且供种器持续供种量不大,除去相互抵消的作用力之后,P可忽略不计[12]。种子沿锥盘向下运动过程中横向位移很小,因此空气阻力Fh干扰可忽略不计。科氏力Fk与锥盘转速、种子相对锥盘速度vr成正比,即
Fk=2m1vrωsin(90°-θ)
式中m1——种子质量
ω——锥形排种盘角速度,rad/s
θ——锥体底角,(°)
由于锥盘转速不高、小籽粒蔬菜种子质量很小,可忽略种子的科氏力Fk。因此,要保证种子不脱离锥体表面,均匀顺利滑入锥盘种槽[13],需要满足
(5)
式中μ——摩擦因数
r——种子所在点与锥盘中心的距离,m
由式(5)可得Gcosθ≥FLsinθ,求得
(6)
式中h——锥盘高度,m
由式(5)、(6)可知,当种子在x轴方向的合力大于等于零、y轴方向的合力等于零时,种子沿锥面顺利下滑,且不飞离锥面。种子在锥盘表面顺利滑落时的锥盘角速度ω与锥盘高度h有关。研究表明,排种过程中的种子弹跳与投种高度及种子落点所在面的倾角存在线性关系,即投种高度越大、倾角越大,跳种现象越明显[14]。结合预试验发现当锥体底角θ不大于50°时,分种螺帽与供种器的距离不大于20 mm,种子会在锥体表面发生一次弹跳但弹跳高度较小,弹跳后种子沿着锥盘表面均匀滑落到种环槽内。
种子由分种盖沿锥盘面滑落后进入种槽环内,且落入种槽环的状态取决于种子相对于锥盘的相对运动。设种子为圆形,种槽环宽度为W,种子沿着锥盘的径向方向进入种沟,运动学分析如图5所示。种子进入种沟时,其极限速度vmax为
(7)
式中r1——锥盘半径,mm
r4——型孔半径,mm
在滑落过程中,种子受到的外力有重力G、滑动摩擦力Ff及F′f、支承力FN,忽略种子降落的初始速度。由动能定理可得
(8)
式中s1——锥盘底部到种槽环之间的距离,mm
s——锥盘母线长度,mm
vt——种子滑落到种槽环边缘的速度,m/s
由式(7)、(8)可得
(9)
由式(9)可知,距离s1受锥盘高度h、半径r1、回转角速度ω的共同影响,是锥盘结构尺寸的关键参数。
3.1.2锥盘结构
锥盘由中心圆锥面与圆环凹面组成。种子沿锥盘锥面滑落进入种槽环,并在推种器滚轮与刮种板的辅助下自然排序。随着锥盘的转动,落入型孔的种子在推种器滚轮的作用下推出型孔,实现顺利排种。其中,锥盘的转速影响种子运动状态及充种效果。同时,锥盘转速过高时,种子易飞离锥面,不利于种子落入种沟及种子型孔,且缩短了型孔与推种器的作用时间,易造成漏播[15-17]。下种盘的落种孔采用槽孔结构,如图6所示,锥盘型孔、下种盘槽孔、壳体槽孔中心在同一轴线E上,且下种盘槽孔、壳体槽孔尺寸大于锥盘型孔,有利于种子的顺利下落,避免落种时切种、伤种及堵塞。
为方便种子落入锥盘的型孔,保障种子排列、充种稳定、及时,选择圆形型孔并保证型孔数量,且播种时型孔个数Z2、型孔半径r4、种槽环宽度W、深度T1应分别满足[18-19]
Z2=240vm/(Sn)
(10)
(11)
(12)
式中S——株距,mm
n——锥盘转速,r/min
lmax——种子最大长度,mm
b——种子平均宽度,mm
l——种子平均长度,mm
ΔT——种槽环间隙,mm
参照蔬菜种子的滑动摩擦因数及常用锥面排种器的结构,经预试验确定锥盘高度h为55 mm,锥体底角θ为30°,求得r1为95 mm,型孔的分布半径r2为100 mm,锥盘外轮廓的半径r3为110 mm。针对蔬菜种子尺寸,确定菠菜种子锥盘上的种槽环宽度W为2.5 mm,深度T1为2 mm,型孔半径r4为1.25 mm,型孔数量Z2为28个;白菜种子锥盘上的种槽环宽度W为2.5 mm,深度T1为2 mm,型孔半径r4为1.5 mm,型孔数量Z2为20个;大葱种子锥盘上的种槽环宽度W为1.5 mm,深度T1为2 mm,型孔半径r4为0.5 mm,型孔数量Z2为30个。
3.1.3推种器结构
推种器固定于排种器的外壳,由压板、刮种板及推种器滚轮组成,结构如图7所示。工作时,刮种板将种沟外的种子刮离。滚轮沿种槽底部被动滚动,并在弹簧力辅助下滚压种子。当锥盘型孔与隔板投种口重合时,型孔内的种子被滚轮推出,避免卡塞或遗漏种子。
推种器与锥盘结构相互配合,并固定于排种器的外壳内侧,且滚轮位于种环的正上方,则通道宽度H1、高度H2、推种器的厚度H3应满足
(13)
H3=r3-r2+r4+Δh3
(14)
式中 Δh3——推种器凹面与推种轮之间距离,mm
推种的弧度ε满足
(15)
式中c——推种器滚轮到固定点的安装距离,mm
刮种板用两个螺钉固定在推种器两侧,宽度H4与推种器厚度H3保持一致,并采用橡胶材质减少对种子的损伤。考虑蔬菜种子尺寸的范围,取种槽环宽度W为2.5 mm,0<Δh3 推种器滚轮直径是影响推种效果的关键参数,若推种器滚轮直径过大推种效果不明显,若过小则会损伤种子[20],推种位置如图8所示。推种器滚轮半径r5应满足 (16) 式中 ϑ——型孔倒角,(°) s3——推种行程,mm 为适应不同类型的小籽粒蔬菜种子,保证种子被顺利推出型孔,取ϑ为45°、推种行程s3为1 mm,则3 mm≤r5≤15 mm。为提高推种装置的适应性,取r5为7.5 mm。因推种器滚轮质量较小,则推种器的推种力由弹簧力决定。弹簧力过大,会损坏种子;弹簧力过小,则推种效果不明显,不利于种子的下落。为保证低损投种,经预试验初定弹簧压力为5 N,选择推种弹簧刚度为5 N/mm。 供种器位于锥盘排种器的上方,与直流电机、链轮、链条、闭环控制系统组成种量控制系统。为保障锥盘排种器内的种量稳定、满足播种要求,采用槽轮式排种结构连续取种、排种,通过闭环控制系统控制供种轮的转速,调节供种器与锥盘排种器的速度匹配关系。供种器由传动轴、分种箱、传动链轮、供种轮组成,结构如图9所示。 针对蔬菜种子特性及尺寸,考虑播种的种量要求,控制排种器的实时种量,设计合理外槽轮结构(槽轮直径、槽深、凹槽半径等),利用传动轴及槽轮孔的螺纹连接形式,调节供种器的有效工作长度,从而实现种量的精确控制,避免因槽轮尺寸大而发生种量的脉动现象。 播种前,锥盘种槽环内需要充满种子,初次供种量q1应满足[21] (17) 正常工作后,供种轮每转1圈的供种量q2应满足[22] (18) 其中 le≥2l (19) 式中dg——外槽轮外径,mm le——供种轮有效工作长度,mm ρ——种子密度,g/cm3 α0——槽内种子充满系数 fg——单个种槽横截面积,mm2 tg——种槽节距,mm γ——带动层特性系数 为了方便种子顺利进入供种轮凹槽,凹槽深度h3应适应种子尺寸。凹槽深度h3应满足 (20) 式中rg——外槽轮凹槽圆弧半径,mm ξ1——槽轮两齿数间夹角,(°) ξ2——凹槽圆弧所对应的夹角,(°) 单个种槽横截面积fg为 (21) 考虑供种轮空间结构及播种效果,小籽粒种子播种轮不宜过大,且种槽数多、槽浅时播种量均匀[23]。如菠菜种子每次播种4行,W=2.5 mm,T1=2 mm,r2=100 mm,l=1.5 mm,初次供种量q1为930粒。经预试验确定种子充满系数α0为0.3,槽半径r6为1 mm,带动层特性系数γ为0.2,外槽轮半径dg为28 mm,供种轮凹槽个数Z1为12,供种轮有效工作长度lg为9 mm。 开沟覆土器与土壤直接接触,主要完成开沟、导种及覆土任务。锄铲式开沟器和宽幅翼铲式开沟器开沟阻力较大、工作幅宽较大且工作不稳定,不适用小籽粒蔬菜播种;圆盘式开沟器易将干湿土混合,不利于保墒,且种子在椭圆形种沟内易造成播深不一致,不适用于精量播种[24]。滑刀开沟器入土性能较好,但长滑刀多用于播种大粒种子,短滑刀易压实土壤不利于种子萌发。结合蔬菜播深浅的特性,设计一种滑刀开沟器。该机构主要由开沟铲片、覆土板、开沟器定位杆、排种管及张紧弹簧等组成,结构如图10所示。 滑刀刃口采用钝角破土,侧板将土壤挤向两侧,种子从中部排种管落到沟底。为防止沟壁上层干土先落到沟底和覆盖种子,侧板尾部制成斜口,并逐渐向后收拢,使下层细湿土先落到沟中覆盖种子,以利于种子发芽。同时,减少滑刀刀片的长度,增加自适应刮土机构使其结构更加紧凑。弹簧有一定的预紧力,保障刮土板随地浮动,将种沟两侧的土壤刮送到种沟内,完成种子的覆土。开沟器的开沟阻力与滑刀刃的曲线有关。设刃口曲线为指数函数曲线[25],如图11所示。 刃口曲线公式为 (22) (23) (24) 式中QA——A点处切线与x轴夹角,rad QB——B点处切线与x轴夹角,rad βA——滑切角,rad βB——初始滑切角,rad 因为yB=yA+lAB,求得e1=e(cotβB-cotβA)/lAB,代入式(22)得AB曲线方程为 y=[e(cotβB-cotβA)/lAB]x (25) 滑切角要满足滑切条件,摩擦角大于23°,所以滑切角应不小于23°。经实践得出,滑切角大于 55°时,工作阻力大,不易入土;而滑切角在 23°时,刀口滑切曲线曲率大,实际应用不可能[26]。因此,滑切角βA为23°~55°时,曲线AB适用于滑刀开沟器的刀口滑切曲线[27]。 开沟器接触土壤瞬间,土壤发生变形,受力如图12所示。其主要受到摩擦力F′和滑刀对土壤的法向压力N′。为使刀刃切开土壤,减小工作阻力且使产生的土壤颗粒沿刃口向后运动,应使滑刀对土壤的法向压力N′的分力T′大于滑切过程中土壤质点受到的摩擦力F′[28],即 T′>F′ (26) 式中,T′=N′tanη,F′=N′tanβ,由于β+η=90°,为实现顺畅滑切,故刃口角η应满足η<90°-β,确定η为60°。 滑刀开沟器刀片厚度一般为3~8 mm,考虑机具结构的紧凑性及安装要求,确定开沟器宽度b应比排种直径略宽,取b为30 mm[29-30]。为保证滑刀与土壤之间产生滑切效果,滑刀入土角α应满足[31-32] α>90°+β (27) α为14°~38°,在此选定入土角为120°。 覆土板结构简单,主要借助自身重力及弹簧拉力实现随地起伏及土壤的刮送,其受力如图13所示,且满足 FTL1=FDL2 (28) 式中FT——弹簧对覆土板的力,N FD——地面对覆土板的力,N L1——弹簧力作用点到覆土板固定点距离,m L2——力FD作用点到覆土板固定点的距离,m 在此取L1=L2,代入式(30)求得FT=FD。 在安装覆土板时应对张紧弹簧施加预紧力,此时覆土板对地面有恒定的压力且保证覆土板下限量不大,避免破坏种沟,覆土板下陷量ZX与作用力FD应满足[33] ZX=6FD/(5K0B) (29) 其中 K0=k0(1+0.27B) 式中B——覆土板间距,mm K0——土壤物理特性相关参数 k0——与土壤性质有关的参数 对刚松过土的粘土土壤来说,K0=1.01。根据种植要求及种沟深度取ZX=3 mm,覆土板间距B根据适应行距要求取B=100 mm,代入式(29)经计算得到作用在覆土板上的力FD=252.5 N。根据胡克定律FT应满足 FT=k1ΔL (30) 式中k1——张紧弹簧刚度 ΔL——弹簧变形量,mm 取覆土板上下摆动的行程为10 mm,求得k1为25.2 N/mm。 试验用地为轻黏土,经旋耕碎土,地表平整,无大石块、秸秆、杂草等,土壤含水率为15.6%,土壤坚实度为720 kPa,符合蔬菜种植要求。试验地块长50 m,宽20 m。 2018年5月20日,在潍坊市对电控锥盘式蔬菜播种机进行试验,如图14所示。准备大葱种子、白菜种子、菠菜种子各1 000粒,平均分3次播种,每次试验播种距离为30 m。由同一操作人员手扶操作,试验地块前后各留10 m的启停距离。 依据JB/T 6973—2005《单粒(精密)播种机 试验方法》和JB/T 10293—2013《单粒(精密)播种机技术条件》的要求,对样机播种效果进行统计测量,得到合格指数、漏播指数、重播指数等评价指标。 在播种试验过程中,电控锥盘式蔬菜播种机工作性能稳定。种子的播种合格指数大于90%,重播指数小于5%,漏播指数小于5%,满足播种要求,具体参数如表2所示。由于人工操作不稳,使得机具前进速度不稳定。种子的漏播、重播误差主要来自种子落入种沟后会发生弹跳,后期需进一步完善。 表2 试验结果Tab.2 Operating results % (1)通过闭环控制系统实时控制播种速度,保证了播种精度及质量;通过连续供种、锥盘排种器分种、滚轮推种的播种方式,保证了排种量及播种精度;通过滑刀曲线构建及覆土机构受力分析,确定了开沟覆土器结构及参数。 (2)通过锥盘排种器排种过程中种子的受力与运动分析,明确了种子顺利充种的条件,确定了推种器的关键结构及运动参数。借助种子特性及种量分析,确定了供种器初次供种量、正常供种量及供种轮结构参数。结合开沟及覆土要求,确定指数函数曲线刃口及覆土机构。主要参数为:锥盘高度h为55 mm,底角θ为30°,锥盘半径r1为95 mm,型孔的分布半径r2为100 mm,锥盘外轮廓的半径r3为110 mm;推种器通道宽度H1为2.5 mm,高度H2为2 mm,厚度H3为21.25 mm,弧度ε为0.8 rad,推种器滚轮半径r5为7.5 mm,推种弹簧刚度为5 N/mm;开沟覆土器入土角为120°,张紧弹簧刚度k1为25.2 N/mm。 (3)采用菠菜种子、大葱种子、白菜种子进行了不同类型种子的播种试验,结果表明,该机播种作业质量高、整机性能稳定,播种合格指数大于90%,重播指数小于5%,漏播指数小于5%,符合国家精密播种标准要求。3.2 供种器
3.3 开沟覆土器

4 田间试验
4.1 试验条件与方法
4.2 评价标准
4.3 试验结果及分析
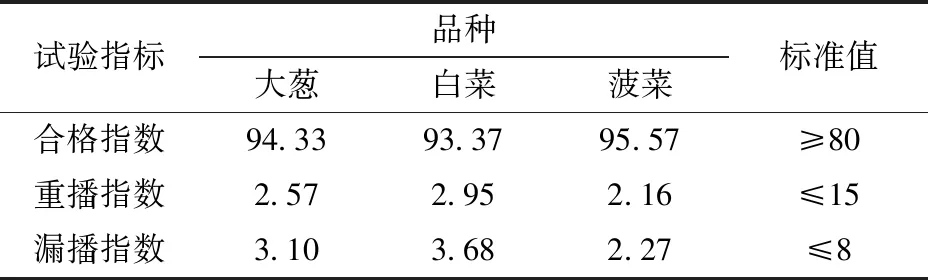
5 结论