AC-DBD等离子体激励对L形截面钝体风荷载减阻的实验研究
2021-05-18兰子奇史志伟孙琪杰
兰子奇, 史志伟, 孙琪杰, 耿 玺
南京航空航天大学航空学院 非定常空气动力学与流动控制工业和信息化部重点实验室, 南京 210016
0 引 言
钝体是工业工程中普遍采用的结构形式,飞行器起落架、高层建筑物、大跨度桥梁等都是典型的钝体结构[1-2]。在复杂多变的流场条件中,钝体上的绕流、涡脱落现象会形成相当大的压差阻力,引发钝体本身强度问题,导致结构变形甚至破坏。随着高新材料越来越广泛的应用,钝体的抗风减阻研究受到越来越多的关注。
针对钝体绕流减阻问题,国内外开展了大量研究。在气动方面,主要包括被动流动控制、主动流动控制两种技术。被动流动控制技术通过改变结构形状或其周围流场边界来实现减阻,不需施加额外能量,主要措施包括覆盖整流罩、设置分流板、钝体表面开孔、钝体尾部布置小型绕流体、改善表面粗糙度、改变横截面形状或造型等[3-11]。被动流动控制技术需要改变钝体整体构型或其所处流动环境,导致成本增加;当钝体所处实际流场发生变化时,对周围其他钝体结构的流场也会产生严重影响,被动流动控制技术有可能达不到所需效果甚至产生反效果。因此,近年来主动流动控制技术得到了更多的关注[12]。
主动流动控制技术是将辅助能量施加于流场中,在不需改变钝体几何形状结构的情况下,通过适当扰动与系统内的流动相互耦合来实现对流场的控制。目前,在钝体构型上已进行了合成射流、壁面振动、声激励、行波壁控制等流动控制措施的研究[13-16]。关于吹吸气的研究相对较为成熟[17-19],具有减阻效果较好、调节简便等优点,但也存在气源规模大、能量损耗高等缺点。提高现有技术的控制效率以及研究新的主动流动控制技术是当前的研究热点。
在主动流动控制技术中,等离子体流动控制技术较为新颖。该技术以局部小范围动量控制流动、抑制分离,改变局部乃至整体受力状态,具有响应迅速、维护方便、经济性好、便于控制等优点。介质阻挡放电(Dielectric Barrier Discharge, DBD)是产生等离子体的主要方法,介质阻挡放电等离子体激励器是其主要控制装置。等离子体激励器通常由覆盖于绝缘材料上下的两层电极组成,电极非对称排列,上层电极裸露于空气,下层电极以绝缘材料覆盖。在两电极间施加高压电以电离空气,产生的等离子体对上层电极附近的空气形成扰动,从而实现主动流动控制[20-25]。
目前,对等离子体流动控制技术应用于圆柱、方形钝体模型的研究较多,在航空航天领域已显现出较高的应用价值,但将等离子体流动控制技术应用于不规则截面钝体仍是一个较为新颖的课题[26-27]。本文以高层建筑为应用背景,选取土木工程中的L形截面高层建筑钝体模型开展研究,进一步分析等离子体流动控制减阻机理,为改善钝体结构抗风性能、拓展等离子体流动控制技术的实际应用提供参考。
1 风洞实验概况
1.1 实验风洞
实验在南京航空航天大学0.8 m低速直流风洞中开展。风洞试验段长2 m、宽0.8 m、高0.8 m。来流速度在0.1~40 m/s之间连续可调。对于拐角为90°的L形钝体,分离点始终位于迎风面与侧风面的拐角位置,不受雷诺数影响。
1.2 实验模型
实验模型采用ABS板制作。以未布置等离子激励器的模型作为基准模型,模型横截面为L形,拐角90°,几何缩尺比1∶300,阻塞率小于5%。风向角如图1所示,本文仅在0°风向角(模型窄面迎风)下开展实验。迎风窄立面为面A,其余各面按顺时针方向分别为面B、C、D、E和F。图2(a)为模型尺寸标注示意图,模型高度H=240 mm,凸角边尺寸D=96 mm,凹角边尺寸d=48 mm。模型沿高度平均分为6层,在每层1/2高度的水平线上布置20个测压点(在各立面上均匀布置,如图1所示),共120个测压点。如图2(b)所示。

图1 模型受风面编号、风向角定义及测压点Fig.1 The number of each surface of the model and the definition of wind direction angle

图2 模型尺寸与测压点示意图Fig.2 Model size and pressure tap
为便于表述测压点及各立面位置,定义如图1所示的坐标系:原点位于面A和F的拐角处;x轴垂直于来流,沿面A向右(面向来流方向);y轴与来流方向平行,沿面F向后;z轴沿模型高度方向垂直向上。
1.3 等离子体激励器及电源
实验选用AC-DBD等离子体激励器(如图3所示)。由于激励器布置位置离测压点较近,为防止激励器对测压点放电,选择裸露电极宽3 mm,覆盖电极宽4 mm,电极厚0.035 mm;绝缘介质选用Kapton胶带,宽10 mm,厚约0.15 mm,耐压值15 kV。激励器长220 mm,可完全忽略其厚度对模型绕流的影响。
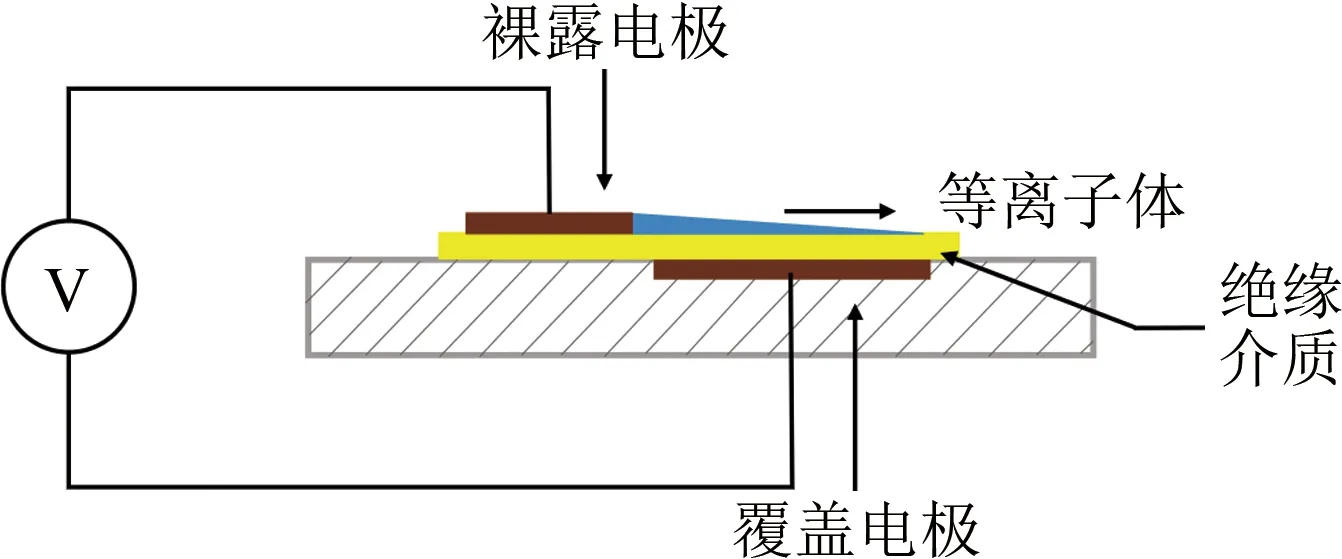
图3 介质阻挡放电等离子体激励器示意图Fig.3 Dielectric Barrier Discharge plasma actuator
在1.2节介绍的基准模型上,按照3种不同形式布置等离子体激励器(如图4所示):布置于侧风面F前缘处,诱导射流顺来流方向;布置于侧风面F前缘处,诱导射流逆来流方向;布置于迎风面A和侧风面F之间拐角处。

图4 不同布置形式的等离子体激励器Fig.4 Plasma actuators with different configurations
选用CTP-2000K低温等离子体实验电源,电压调节范围为0~30 kV,中心频率选择范围为1~100 kHz,输出电压波形为正弦波。在实验中,电极电压的频率固定为8 kHz。综合考虑模型、激励器材质以及表面测压点布置位置,将电压固定为14 kV。
1.4 实验工况
采用片光流动显示技术及PIV系统选取实验工况。在风洞试验段上游注入示踪粒子,以片光源垂直来流照射流场截面。不同布置形式的激励器都能产生一定的抑制侧风面F流动分离的效果,通过比较施加激励前后侧风面F的剪切流,初步选定能够有效抑制流动分离、增强模型抗风性能的来流速度范围,并通过PIV进行验证。最终选定的实验工况如表1所示。
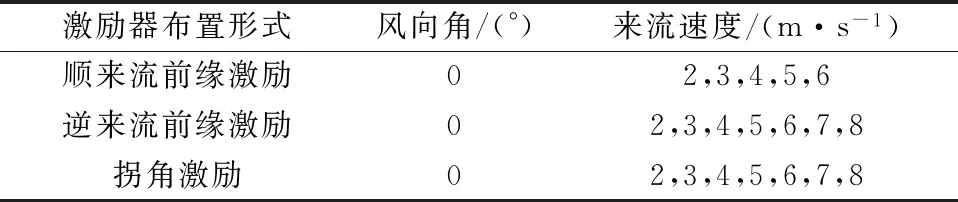
表1 实验工况表Table 1 Experimental conditions
1.5 测量系统
1.5.1 压力测量系统
采用PSI公司的压力扫描阀测量压力,最大量程为2490 Pa。测量过程中,将扫描阀模块置于金属屏蔽盒内以避免电磁干扰影响。实验过程中,压力扫描阀的数据采集频率保持为330 Hz,采集20 000个数据,平均处理后即可得到平均压力值。
1.5.2 PIV系统
实验中使用的测试系统为镭宝公司生产的PIV激光器系统。该系统由激光器、电源系统和移动控制部件组成。其中,Vlite 200 PIV激光器的工作频率为15 Hz,每个脉冲能量为200 mJ,脉宽8 ns。电荷耦合元件(CCD)分辨率为2048 pixel×2048 pixel,帧频为14 帧/s,每2帧图像的最小时间间隔约为120 ns。实验中使用的示踪粒子为丙三醇雾化粒子,以商业发烟器向风洞内注入。
所得的PIV结果由35幅瞬时速度矢量图平均得到。为避免三维效应和测压点反光等带来的干扰,激光测量平面选择在模型1/2高度处。
2 实验数据分析
2.1 不同激励器布置形式对减阻的影响
2.1.1 整体阻力的变化
为直观比较不同激励器布置形式下等离子体激励对风荷载减阻的影响,将每个测压点的风压值对其控制面积加权积分,得到整体气动力。其中,顺来流方向气动力为模型总体顺流向气动力,即阻力FD,定义为:
FD=∑pi×Ai×cosαi
(1)
式中,pi、Ai分别为第i号测压点的风压值及其控制面积,αi为测压点的压力方向与流向的夹角。通过比较施加激励后的阻力FDa和未施加激励时的阻力FDb,即可得到整体减阻率η:
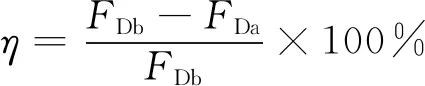
(2)
图5给出了不同激励器布置形式下整体减阻率随来流速度的变化规律。可以看到,不同来流速度下,拐角激励的减阻效果最好,在低速下最大减阻率接近14%;随着流速增大,减阻率基本稳定于10%左右;流速进一步增大至6 m/s后,减阻率迅速降低。顺来流前缘激励的减阻效果相对较差,在2 m/s流速下最大减阻率不超过8%;随着流速增大,减阻率迅速降低,在流速4 m/s之后,减阻率下降至2%以下,对分离流的扰动趋近于0。逆来流前缘激励的减阻效果介于前两者之间,其变化规律与拐角激励类似。
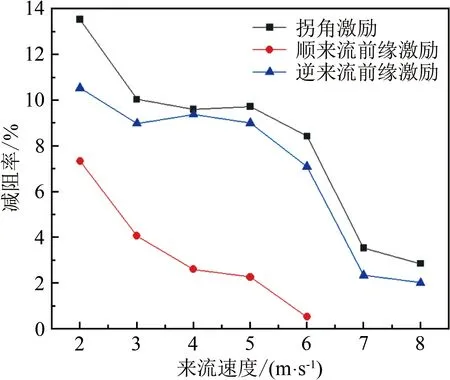
图5 不同布置形式的激励器施加激励后的整体减阻率Fig.5 Drag reduction rate after actuation of different layout actuators
2.1.2 测压点阻力的变化
基于上述对整体阻力的分析,进而采用风压折减系数Cpr[28]表征测压点的阻力变化规律:
Cpr=1-Cpa/Cpb
(3)
式中,Cpa、Cpb分别为施加激励后、未施加激励时的测压点风压系数。Cpr数值越大,说明减阻效果越好;Cpr<0表示风压系数绝对值不减反增。
由于数据量较大,仅选择来流速度6 m/s、高度z=100 mm处的测压点进行分析。施加激励后,分析背风面E、侧风面F的测压点13~20的风压系数,得到如图6所示的风压折减系数。可以看出:1)在拐角激励下,背风面E的测压点13~16的Cpr变化趋势与逆来流前缘激励下基本一致,数值差距较小,且都远高于顺来流前缘激励;侧风面F的Cpr较高,说明拐角激励有效抑制了侧风面流动分离,减阻效果较为明显。2)在逆来流前缘激励下,侧风面F的Cpr略小,说明激励对侧风面流动分离的抑制效果较弱。3)顺来流前缘激励下,在背风面E靠近侧风面F的位置(测压点16)产生了一定减阻效果,其他位置减阻效果较低;在侧风面F前缘处(测压点20)Cpr为负值,风压系数绝对值有所增大。在3种激励情况下,风压折减系数波动都较大,一方面与激励器放电的不均匀性有关,另一方面则与脱落涡的扰动有关。

图6 不同布置形式的激励器施加激励后各测压点的风压折减系数Fig.6 The pressure reduction coefficient of each pressure tap after actuation
2.2 施加激励前后的平均风压分布
通过风压系数加权积分对整体阻力进行分析可知:拐角激励的减阻效果最佳,逆来流前缘激励次之,顺来流前缘激励的效果最差。下面对各立面的风压系数变化作进一步研究。
第一,要在水资源配置中充分考虑农业用水和保障粮食安全的用水需求。水利部会同发改委等部门编制了全国水资源综合规划,明确了水资源配置方案,其中充分考虑了近期、中期和远期农业用水需求。
在3种激励器布置形式下,激励器均布置于迎风面A和侧风面F之间,施加激励后,流经侧风面F和背风面E的流场受到较大影响,因此,重点对侧风面F和背风面E进行分析。以图1所示坐标系定义模型立面,其中面F位于平面oyz内(x=0 mm),面E平行于平面oxz(y=96 mm)。
2.2.1 施加拐角激励前后的平均风压分布
将施加激励前后侧风面F和背风面E的平均风压系数Cp绘制于图7和8中。可以看出:未施加激励时,与来流方向平行的侧风面F的平均风压系数为负值,在2 m/s流速下,风压系数在-0.8~-0.6之间变化,随着流速增大,风压系数绝对值和压差不断减小;背风面E全为负压,总体分布比较均匀,风压系数的变化规律与侧风面F相似,绝对值由左下方向右上方递减。
图7 施加激励前后不同流速下侧风面F平均风压系数云图(x=0 mm)Fig.7 The mean pressure coefficient contour maps of surface F under different wind speeds conditions before and after applying actuation(x=0 mm)

图8 施加激励前后不同流速下背风面E平均风压系数云图(y=96 mm)Fig.8 The mean pressure coefficient contour maps of surface E under different wind speed conditions before and after applying actuation(y=96 mm)
施加激励后,侧风面F的风压系数绝对值显著减小,随流速增大,其变化趋势为由前缘向后缘逐渐降低,在部分位置出现风压突变;背风面E始终为负风压,与未施加激励时相比,背风面的风压变化非常剧烈,且远小于未施加激励时,随流速增加,风压波动逐渐平缓。背风面E的风压系数变化规律与图5的减阻率变化规律是一致的。
2.2.2 不同布置形式激励器施加激励前后的平均风压分布
为比较不同布置形式激励器的流动控制效果,选取2、4和6 m/s三个典型风速,将平均风压系数云图绘制于图9和10中。与未施加激励时相比,施加逆来流前缘激励后,侧风面F、背风面E的风压系数绝对值都有所降低。侧风面F的平均风压系数绝对值在四周边缘处略小,背风面E的边缘处风压变化剧烈,中部的风压系数逐渐趋于均匀变化。随着流速增大,侧风面F的风压系数在-0.3~-0.5之间变化,背风面E大部分的风压系数维持在-0.3~-0.4之间。流速增大至6 m/s时,施加激励后两个面的风压系数值相比于未施加激励仍有所增大。

图10 不同流速下、不同布置形式激励器施加激励前后的背风面E平均风压系数云图(y=96 mm)Fig.10 The mean pressure coefficient contour maps of surface E under different wind speed conditions before and after applying actuation(y=96 mm)
施加顺来流前缘激励后,不同流速下侧风面F和背风面E的风压分布都具有比较一致的规律。侧风面F前缘处(x=0 mm)风压系数出现最小值,且沿来流方向呈增大趋势,后缘处的风压系数大于同一流速下未施加激励时的风压系数,且变化非常剧烈。背风面E的风压系数为负值,幅值分布比较均匀,与未施加激励相比,风压变化更为平缓,平均风压绝对值也小于未施加激励。随着流速增大,激励器对侧风面绕流的控制能力减弱,施加激励前后的侧风面F、背风面E的风压系数变化规律趋于一致。
由实验结果可知:在低速下,等离子体激励能够有效改善背风面流动分离情况,降低背风面E的风压系数绝对值;在实验状态下,拐角激励抑制流动分离效果显著,侧风面F和背风面E的风压系数绝对值都小于未施加激励时;逆来流前缘激励抑制流动分离效果偏弱,侧风面F的风压系数绝对值有一定程度减小;顺来流前缘激励抑制流动分离的效果随流速增大迅速降低,侧风面F的负压绝对值顺流向呈减小趋势,背风面风压系数绝对值有所减小。
2.3 不同布置形式激励器减阻机理研究
由图11(a)和12(a)可知,未施加激励时,气流在迎风面A和侧风面F的拐角处发生大尺度流动分离并产生回流涡,施加拐角激励后,都产生了显著的抑制效果。由于激励器恰好作用于分离点上,施加激励后,通过向边界层注入能量抑制了侧风面F的流动分离,流动能够重附于侧风面F表面。分离流被完全抑制,回流涡不再对侧风面F形成扰动,背风面E流速增强。侧风面F流动再附后,尾流宽度变窄,尾迹缩短,尾流两侧气流流动加快,尾涡结构的大小和位置相较于未施加激励时都发生了明显变化,尾流的能量耗散显著降低。激励有效改善了侧风面F和背风面E分离区的气流分离状况,使风压系数绝对值降低,整体阻力进一步减小。
图11(c)显示逆来流方向的诱导射流运动至侧风面F前缘处时,进一步将分离点处的绕流外推,侧风面F的分离流未得到明显抑制。与图11(a)未施加激励时相比,虽然激励诱导动量方向与来流方向相反,但也对来流形成了一定的逆向扰动,剪切层厚度顺来流方向逐渐增大,并在下游位置向侧风面F内偏。激励器两侧电极形成离子层后,侧风面F和背风面E的分离区气流受到诱导,杂乱无章的流动产生规律性变化,回流速度明显增强,回流区气流顺电场方向流动,形成近壁射流。脱落涡涡核在流动分离区气流的诱导下逆来流方向运动,与未施加激励时相比,进一步贴近背风面E,旋涡强度有所减弱,涡结构得到明显改善。

图11 不同布置形式激励器施加激励前后的速度标量图Fig.11 Speed scalar quantity of the plasma actuator with different configurations before and after applying actuation
施加顺来流前缘激励时,向边界层注入能量,分离剪切层向侧风面F附体,如图11(d)所示。分析涡量图12(d)可知,激励产生的近壁射流促进了旋涡发展,旋涡强度增强,随剪切层向侧壁面贴附,引起侧风面F前缘产生较大的负风压系数峰值。结合图9可知,激励器布置于流动分离点时,施加激励后,诱导产生的低速近壁射流沿侧风面F流动,壁面附近的回流区得到抑制,负压绝对值顺来流方向呈减小趋势。顺来流前缘激励整体上抑制了侧风面F的气流分离,降低了侧风面F后缘和背风面E的风压系数绝对值。
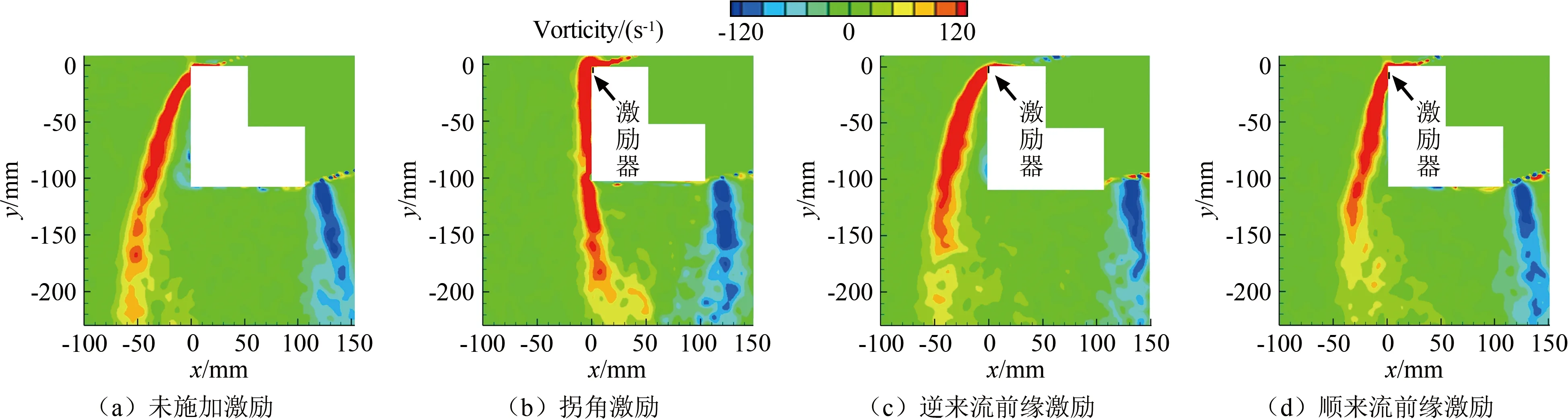
图12 不同布置形式激励器施加激励前后的涡量图Fig.12 Vorticity chart of the plasma actuator with different configurations before and after applying actuation
3 结 论
通过AC-DBD等离子体激励对L形截面钝体风荷载减阻的实验研究,得到以下结论:
1) 不同布置形式的激励器都产生了一定的减阻作用;拐角激励器、逆来流前缘激励器施加激励后的减阻效果远高于顺来流前缘激励器。不同的流动控制机理是影响减阻效果的关键因素。
2) 传统的AC-DBD等离子体激励器,等离子体诱导射流速度小,仅能在低速来流条件下产生较好的减阻效果。随着流速增大,减阻效果迅速降低。
3) 钝体模型尺寸较小,测压点密集,激励器电压最大仅能施加到14 kV,采用新型的等离子体控制方式和控制手段,可以进一步提高激励能量,实现更好的控制效果。
