基于SLAM技术手持三维激光扫描仪在铜矿山井下的应用
2021-05-17刘志强
刘志强
(山西中条山集团篦子沟矿业有限公司, 山西 垣曲 043700)
1 前言
随着科学技术的飞速发展,为了矿山更加准确合理的开采,创建矿山三维模型已势在必行,矿山井下采用传统的全站仪碎步测量法及支距法测绘,无法获取能够反映井下巷道及采场空间信息的坐标数据。如何提高工作效率,快速准确完成井巷工程测绘工作已成为目前急需解决的问题。近几年备受关注的三维激光扫描技术突破了传统测量中单点测量的模式,作为当今时代的先进测量技术,其高精度、高效率的特点为矿井测量提供了新的思路、新的途径[1-3]。
三维激光扫描技术又被称为实景复制技术,具有高效率、高精度的测量优势。三维测量技术不断发展并日渐成熟,目前三维扫描设备也逐渐商业化,本文所讲述的三维激光扫描仪通过发射激光来扫描被测物,以获取被测物体表面的三维坐标,其巨大优势就在于可以快速扫描被测物体,扫描不需反射棱镜即可直接获得高精度的扫描点云数据。这样一来可以高效地对真实世界进行三维建模和虚拟重现。
2 手持三维激光扫描仪
2.1 SLAM技术介绍
SLAM(Simultaneous localization and mapping)同步定位与地图构建技术,最初由R.C. Smith和P. Cheeseman研究而提出,主要解决从未知环境的未知地点出发,1986年针对空间不确定性在运动过程中通过重复观测到的地图特征(墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。技术原理如图1所示。
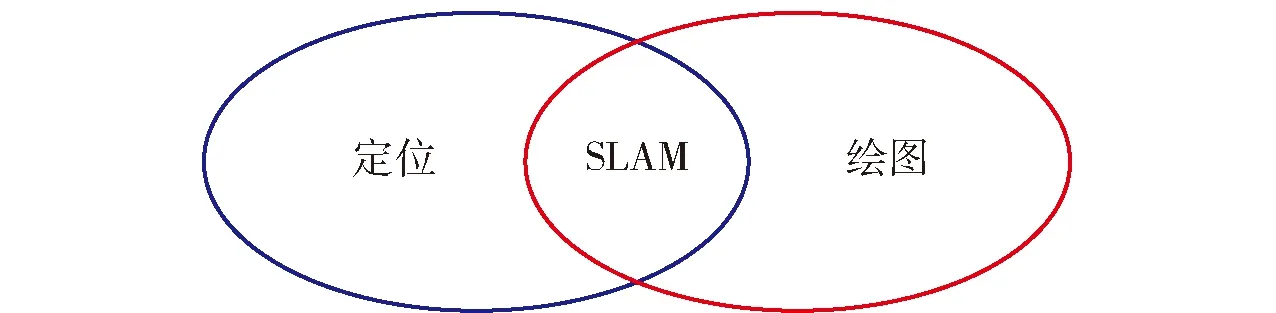
图1 SLAM技术原理图
2.2 测量仪器
采用GEOSLAM手持便携式三维激光扫描仪,该仪器具有SLAM系统,支持移动式实时快速测量,获取被测物高精度、高质量的单位点云数据,该设备主要有手持探头、采集器两部分组成,探头重量1 kg,采集器重量2 kg,有效测距30 m,测量范围270°×360°,每秒钟采集点云数量43 200个,续航能力4 h。
2.3 工作原理
使用二极管让激光脉冲发送实时信号借助探测仪器的旋转棱镜,将信号传输给目标从而对脉冲信号进行接收,通过激光测距原理获取仪器中心到扫描物体的距离,同时测量扫描物体返回的横向扫描角度值φ和纵向扫描角度值ω[4],通过SLAM算法完成空间数据的相对关系匹配,通过三维激光扫描技术可以有效获取测量目标空间范围的信息。
X=Scosωsinφ
Y=Scosωcosφ
Z=Ssinφ
3 矿山测量模型建立解决方案介绍
3.1 测量方案
具体矿山测量模型建立解决方案如图2所示。
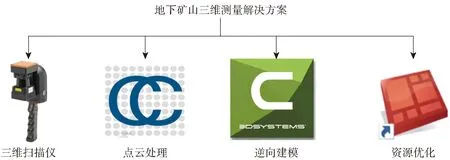
图2 地下矿山三维测量解决方案
3.2 测量作业流程
1) 准备工作
根据测量任务,确定测量区域,规划好测量路线,设备初始化准备测量。
2) 点云数据采集
单人手持三维激光扫描仪行进至待测量区域,行进速度按照正常步行速度,完成一次闭合测回即可,本文中测量的地下矿山井巷工程总距离为1 km,用时20 min。
3) 数据提取和解压
数据采集结束后,运用仪器自带或者任意高速的U盘插入设备的数据传输USB接口,扫描点云数据会自动传输至U盘中。整个数据包传输用时2 min。将U盘中点云数据压缩包复制至计算机并运用三维激光扫描仪专用解压软件GeoSLAM Hub对扫描点云数据进行解压即可,解压时间20 min。
3.3 点云数据处理
数据解压后获取巷道的点云数据,我们将扫描的点云数据导入数据处理软件CloudCompare进行点云数据查看、抽稀、降噪、剪切、移动以及漂移点的处理等等,最终得到地下矿山整体空间三维数据,井下巷道扫描后的点云数据拼接图如图3所示。

图3 巷道点云数据拼接图
3.4 模型建立
运用Geomagic Control建模软件对点云数据进行降噪、删除体外孤点、封装、简化以及网格修复等等一些列的优化实现逆向建模,完成井下工程实体模型创建工作,巷道实体模型如图4所示。
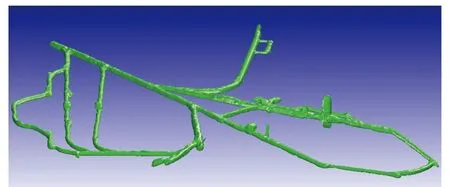
图4 巷道实体模型图
3.5 测量结果精度评定
对整个扫描区域的空间位置进行了评定,在扫描时通过立棱镜杆获取全站仪控制点位置,两组数据比较,得出最大点位相差为±0.08 m,完全可以满足生产要求。
4 综合测量
案例所采集的点云数据为山西中条山集团篦子沟矿业公司地下某中段系统工程,由于点云数据量偏大以下仅截取其中副井附近一段点云数据作为图形处理文件,具体点云数据如图5所示。
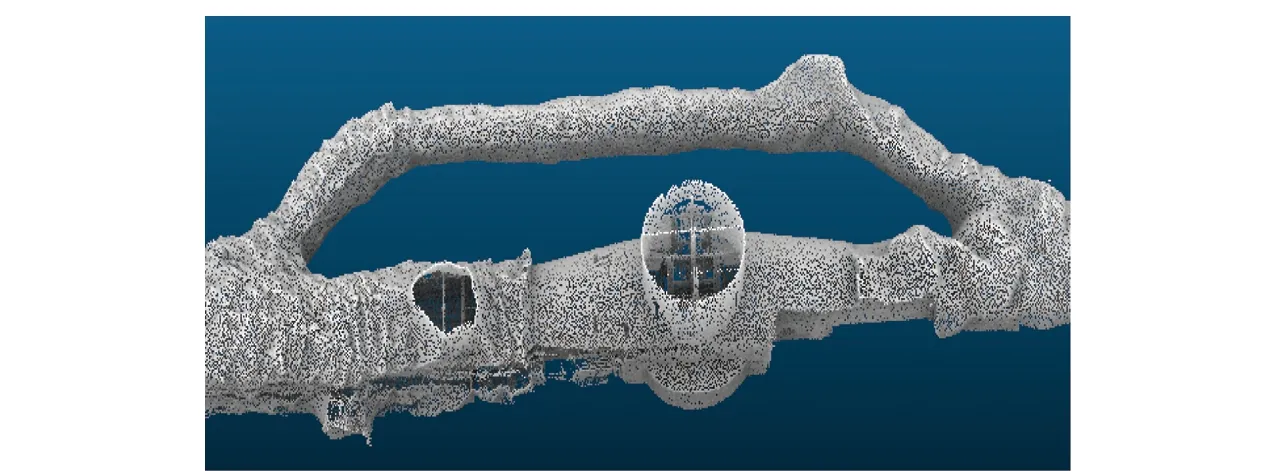
图5 副井附近点云数据
4.1 常规测量
根据手持三维激光扫描仪获取的点云数据可以准确查看实际施工工程的规格以及与相邻工程的空间关系,该功能可以准确掌握工程掘进的规格以及高精度贯通工程控制测量等,具体如图6所示。
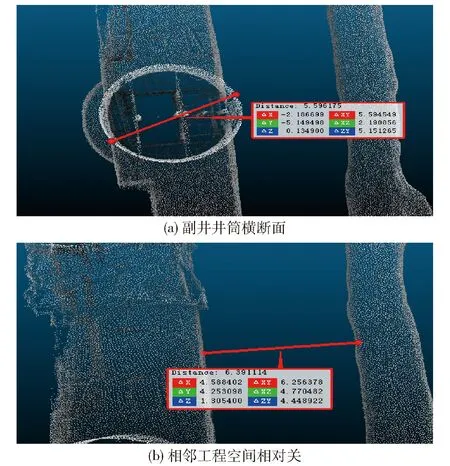
图6 常规控制测量
4.2 精细化管理
根据手持三维激光扫描仪获取的点云数据进行灰度以及剖切等查看施测时巷道内部的实际情况,该功能可以准确掌握工程内部设备设施的布置情况,为矿山精细化管理提供参考依据,巷道内部点云数据如图7所示。
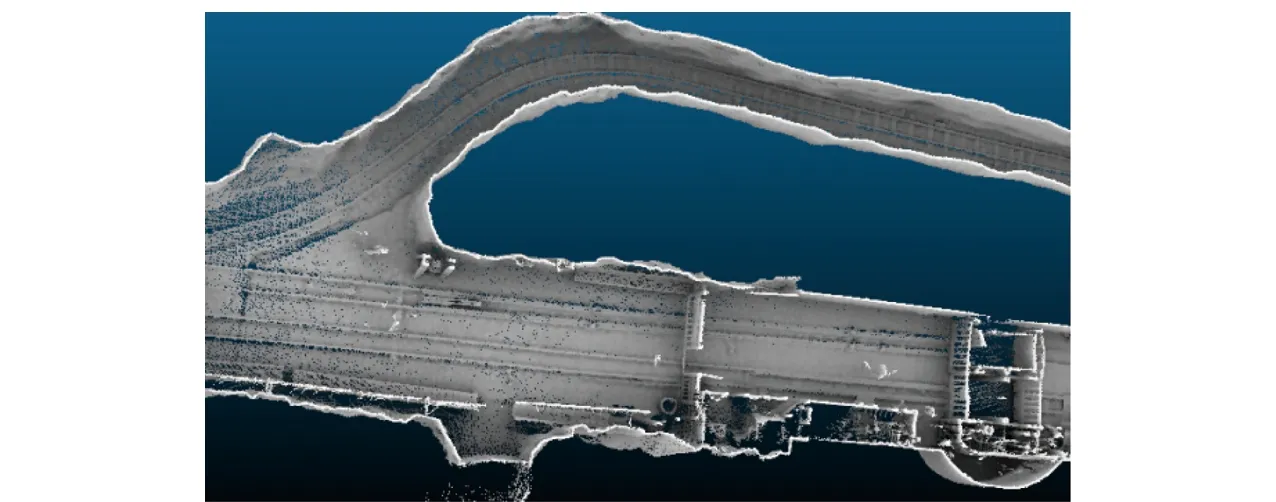
图7 巷道内部情况点云数据图
4.3 剖切平剖面
根据所建立的工程模型,可以精确剖切任何部位平剖面图,该剖切图纸可以生成与CAD等软件共享的技术图纸,巷道平面如图8所示。

图8 巷道平面图
4.4 工程质量检验
将生成的工程实体模型保存为.dxf通用格式文件,导入矿业专用软3Dmine/surpac等,我们可以与设计文件进行对比查看工程的施工进度以及与设计在空间上偏差,做到精细化管理,具体如图9所示。

图9 巷道模型与设计文件对比图
4.5 工程量计算
通过三维激光扫描技术能够快速准确获取采场三维空间数据,构建采场三维精细模型,可进一步提高采场体积计算精度[5],爆破空区实际体积运算如图10所示。

图10 爆破空区实际体积运算图
5 结论
根据矿山应用实例,手持三维激光扫描技术可在较短的时间内完成矿山三维数字模型点云数据测量,极大提高测量效率;适合空间条件复杂的地下矿山,较传统测量技术具有更好的三维适应性;测量过程简便,可由单人完成全部测量任务;点云密度高;可完整、详实地反映地下空间现状;可直接与三维资源模拟软件及开采设计软件良好衔接,为数字化开采及管理提供详实三维数据;可用于验方测量,超、欠挖核对;可为中深孔等采矿设计提供准确的实体模型;为采空区管理、空区体积计算及充填设计提供依据等;安全方面可对受压严重的特殊巷道进行定期多次测量,通过模型对比准确测定岩石移动变化规律,为安全生产提供可靠的依据。
