独立车轮导向优化研究进展
2021-05-17孙效杰许聪陆正刚夏志成
孙效杰,许聪,陆正刚,夏志成
(1.上海应用技术大学轨道交通学院,上海,201418;2.同济大学铁道与城市轨道交通研究院,上海,201804;3.北京锦鸿希电信息技术股份有限公司,北京,100071)
独立轮对,是将左右两侧车轮解耦,使之能够以不同转速运行。但在应用中发现,相较于传统刚性轮对,独立轮对不具备自导向能力[1]。另外,独立轮对运行过程中,轮缘会长期贴靠钢轨,造成严重的噪声及轮轨磨耗,独立轮对的研究与应用一度陷入停滞[2]。
20世纪后期,随着高速列车以及城市轨道交通的发展,人们对列车的速度以及乘坐的便利性提出了更高的要求。1984年,安装独立轮对的现代低地板有轨电车首次在日内瓦投入使用,人们逐渐认识到独立轮对在轨道交通领域的优越性。FREDERICH等[3-6]从力学角度研究独立轮对的导向机理,比较了独立轮对与传统刚性轮对的性能差异。自此,独立轮对的相关研究受到学者的广泛关注,独立轮对导向优化的研究成果不断涌现。
我国关于独立轮对研究起步较晚,进入21世纪后,才逐渐开始重视独立轮对及其相关研究。国家科技部立项成立“100%低地板轻轨车辆关键技术”等课题,中车长客和唐客等自主研制的独立车轮有轨电车先后下线,甚至出口土耳其等国[7]。DUKKIPATI 等[8]总结回顾国外独立轮对导向研究,但此后国内外的相关研究进展缺乏类似的总结。因此,本文作者在已有文献和自己研究工作的基础上,梳理和总结独立轮对导向优化相关研究方法,概括独立轮对导向优化的研究方向及成果,并就未来独立轮对导向优化的发展趋势,提出合理建议。
1 独立轮对的导向需求
独立轮对两侧车轮可以不同速运行,横移和摇头运动也不再耦合,这使得其纵向蠕滑力近乎为零,纵向蠕滑力矩难以对轮对产生导向作用[9]。独立轮对车辆在具有易实现低地板、高临界速度和易变轨距等优点的同时,受导向能力不足的限制,即使较小的横向力也会使其贴靠一侧钢轨运行,并且过曲线时只能依靠轮缘接触导向,不仅产生较大的轮缘/踏面磨耗和噪声,还增加了脱轨的风险。因此,如何提高独立轮对的导向能力是本领域的研究热点。
关于独立轮对的导向研究,目前的研究思路可总结为三大方向:
1)提高车轮重力复原力:主要体现在车轮踏面外形的优化。
2)改进转向架结构:主要分为2类,一是将左右车轮(或前后车轮)耦合起来,使其获得类似传统轮对的导向能力;二是通过某种机械结构干涉车轮的运动,使车轮趋于径向位置。
3)轮对主动控制:依据轮对的状态参数施加控制力或力矩,实现轮对主动导向/稳定性控制。
2 踏面外形优化
关于轮对踏面的设计,人们最初仅关注踏面的磨耗问题,致力于设计出磨耗稳定的踏面。直到1978年,HELLER 等[10]系统性研究了踏面形状与车辆运行的稳定性、曲线通过性之间的矛盾关系。此后,相关学者在设计踏面形状时开始关注其对车辆动力学性能的影响。EICKHOFF等[11]从理论上研究了踏面对独立轮对动力学特性的影响,并开展了轮轨测试验证。
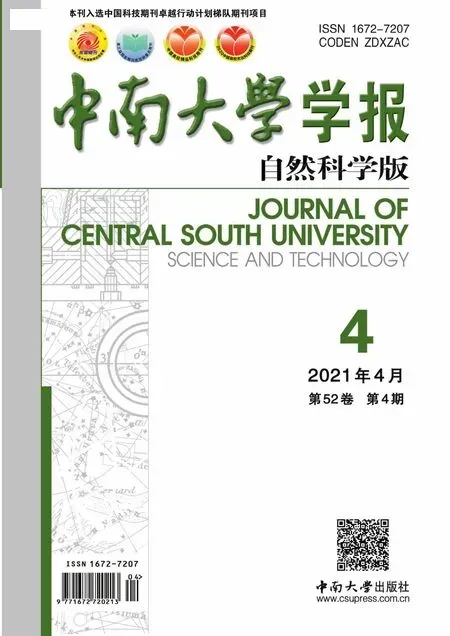
图1所示为轮轨接触受力图。由图1可见:轨道车辆的踏面与钢轨在水平方向会形成一个夹角δ,轮重Q沿水平方向分力就是重力横向复原力F,N为车轮支反力。左右车轮重力横向复原力的合力对轮对的横移具有一定的复原作用,且与接触角差相关[12],如下式所示。

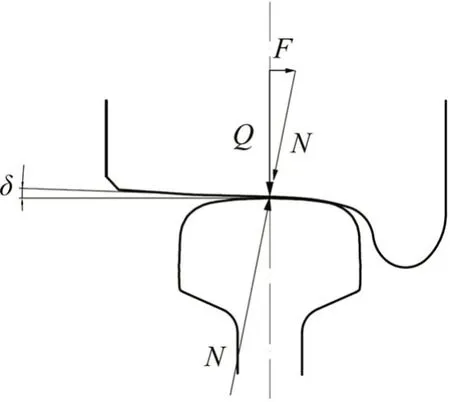
图1 轮轨接触受力图Fig.1 Wheel-rail contact force diagram
从式(1)可以看出:在平均轮重一定的情况下,接触角差(δR-δL)越大,重力复原力Fgy越大。因此,一些学者以增大接触角差为目标,进行踏面形状的设计。
佐藤荣作等[13]给出了其2次进行独立车轮踏面设计的结果,并通过运行试验验证了有效性;任毅等[14]基于给定的钢轨轮廓,采用接触点拟合的方法设计了新型踏面;孟昭明[15]基于佐藤荣作的研究并结合国内情况设计一种新型独立车轮踏面(MDL型踏面),并就上述踏面对车辆性能的影响进行了动力学分析比较;沈钢等[16-17]提出通过接触角曲线反推法设计车轮踏面,解决了以往独立车轮踏面设计需要反复试凑的问题,该方法可以直接得到具有某一理想指标的踏面外形,在未来的踏面设计中或被广泛采用。
KOMATSU 等[18-19]提出了有别于传统铁路车轮的反锥度踏面外形,即将轮缘置于钢轨外侧,并开发了一种具有自导向能力的独立轮对机构,对车辆动力学性能和过曲线能力有一定的改善。WANG[20]在其基础上进行了扩展研究,提出基于单个轮静态特性的设计方法,着重考虑了车轮重心轨迹与轮轨接触约束,并通过SIMPACK多体动力学软件进行了仿真验证。
KOYANAGI[21-22]认为踏面的锥度是导致车轮打滑的主要原因,据此提出了圆柱形的独立车轮踏面结构,但需要加装其他的导向机构(第三轨导向)来保证正常运行。该种方法虽然可以保证车辆在高速运行下的稳定性,不过与现有铁路配合度不高,且如何过道岔仍是一个难点。因此,仅限于实验室范围内的小型试验。
独立车轮踏面外形优化设计是导向优化的研究方向之一,通过对车轮踏面外形的合理设计,能够有效地优化车轮的导向性,提高车辆动力学性能。但改进踏面对轮对导向能力的提升还存在一定的限制:导向效果较弱,无法矫正冲角,车辆的导向能力会随着车辆运行、磨耗增加而再次减弱。因此,通过优化车轮踏面提升导向性的方法一般作为辅助方案使用。
3 转向架结构改进
轮对在受到横向激扰时,除了会产生横向位移,还会出现一定的冲角。若冲角无法复位,车轮便会带冲角运行并产生横向蠕滑力,进而使轮对发生横移,这种横移仅靠重力复原力难以回正[23]。因此,除了对独立车轮踏面外形优化之外,学者们还探究了对独立车轮转向架的优化改进。表1所示为一些典型的优化改进转向架及其导向原理。

表1 典型优化改进转向架及其机理Table 1 Typical improved bogies and mechanisms
3.1 耦合转向架
3.1.1 横向耦合
横向耦合转向架是指在轮对左右独立旋转车轮之间,通过刚度和阻尼的变化使轮对重新耦合,在保持独立轮对优点的前提下,使其获得类似于传统轮对的导向能力。
阿尔斯通公司所研制的Arpège 型动力转向架便属于耦合转向架,如图2所示[24]。通过耦合器将左右车轮进行耦合,重新引入了刚度和阻尼,使轮对获得一定的曲线通过能力与自动对中能力,但是该型转向架在小半径曲线上的通过能力较差,且耦合器的使用也影响了车辆低地板化。
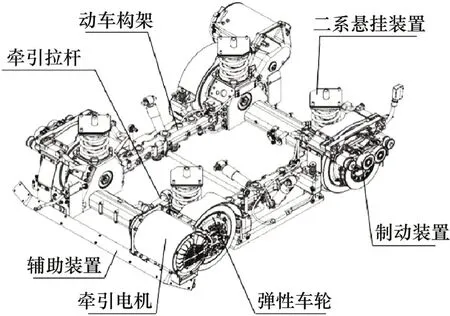
图2 Arpège动车转向架Fig.2 Arpège bogie
LENG等[25]研究了一种横向摩擦耦合轮对,通过摩擦式限滑差速器进行左、右车轮的耦合,使用摩擦转矩对独立轮对进行耦合,可以提高轮对的导向性能;寇杰等[26]将对称式的机械差速器应用于独立车轮上,实现了车轮的被动差速控制;孙效杰等[27]提出一种电耦合轮对,通过电磁力矩耦合左、右车轮,与机械耦合的效果相似,但更方便、经济。
3.1.2 纵向耦合
纵向耦合转向架的典型代表是西门子Combino转向架,其牵引电机被纵向布置在车轮两侧,使用联轴节/齿轮箱将转向架同一侧的前、后车轮耦合起来,通过前后轮轨横向力的差值力矩使转向架获得冲角复位对的能力,如图3所示[28]。中车株洲电力机车有限公司2014年从西门子引进了Combino Plus型转向架的生产技术,通过分析其结构特点、工艺难点,进一步掌握了其设计理论,为研制国产化独立车轮转向架提供了经验[29]。
图3 Combino转向架Fig.3 Combino bogie
池茂儒等[30]提出了独立轮对耦合转向架的概念,就是将位于前、后车2个独立轮对单轴转向架通过一个弹性元件连接起来,使之成为一种新型转向架。通过理论与仿真分析发现:独立轮对耦合转向架的导向能力较好,能够实现直线上的自动对中与良好的曲线通过性。
相较于传统转向架,耦合转向架在保证了独立轮对优点的同时,能够使独立轮对获得类似于刚性轮对导向能力,而且可以通过改变左、右车轮间的耦合程度适应不同线路情况,实际应用时较经济、便捷。
3.2 径向转向架
3.2.1 自导向转向架
FREDERICH[3]提出了最初的自导向概念:仅靠轮轨间的作用力就可实现车轮径向调节,研制出EDF 型转向架,采用凹型踏面车轮以及由三角形托架对向构架相互铰接的车轮轮座,并在慕尼黑进行了实际测试。EDF 型转向架能够实现轮座直线上的横移以及复位,但在小半径曲线上,无法使轮对冲角回正[23]。
而最典型的自导向转向架是南非的Scheffel型转向架,如图4所示。该型转向架通过与轴箱相连的副构架交叉支撑,其前后副构架使用十字型布置的2个连接杆进行铰接与支撑,提高了车辆的导向性,虽未使用独立车轮,但由于其典型性,为独立车轮自导向转向架的设计提供了参考。

图4 Scheffel转向架Fig.4 Scheffel bogie
日本基于地铁车辆的使用要求研制了SC系列独立轮对自导向转向架,并推出了SC101和SC102等型号[31-32],实车运行结果表明,与普通转向架相比,自导向转向架的曲线通过性能更优,运行噪声、振动等情况均有所降低;须田义大等[33]对仅后轮采用独立车轮的自导向转向架的曲线通过性能进行了理论分析及试验研究,推导了导向性能与车轮踏面锥度、刚度的关系。
鉴于一系纵向刚度与车辆曲线通过性之间的矛盾,自导向转向架通过降低一系纵向刚度,利用前后轮间的导向机构与轮轨纵向蠕滑力使车辆在过曲线时车轮趋于径向位置[34]。但自导向转向架的调节作用较弱,无法实现车轮完全径向。
3.2.2 迫导向转向架
迫导向是指利用车辆通过曲线时车体相对于转向架的转角或车体与车体之间的转角迫使轮对趋于径向位置,实现提高轮对导向能力。
西班牙的Talgo列车所用的铰接式单轴转向架是目前迫导向应用最成功的案例。其轮对外侧安装有Z字形导向结构,分别与前后车体相连,通过曲线时,由于前后车体相对于轨道的偏转角方向相反,导向结构中间位置的杆将绕Y轴做反向运动,使得轮对始终处于径向位置。Talgo 转向架采用三角拖动结构,车体质量一端由轮对进行承载,另一端挂在前一节车端部(低重心高支承),如图5和图6所示[35]。最前部使用传统轮对,在传统轮对的牵拉作用下,导向机构将使轮对在运行过程中趋于轨道中心位置。
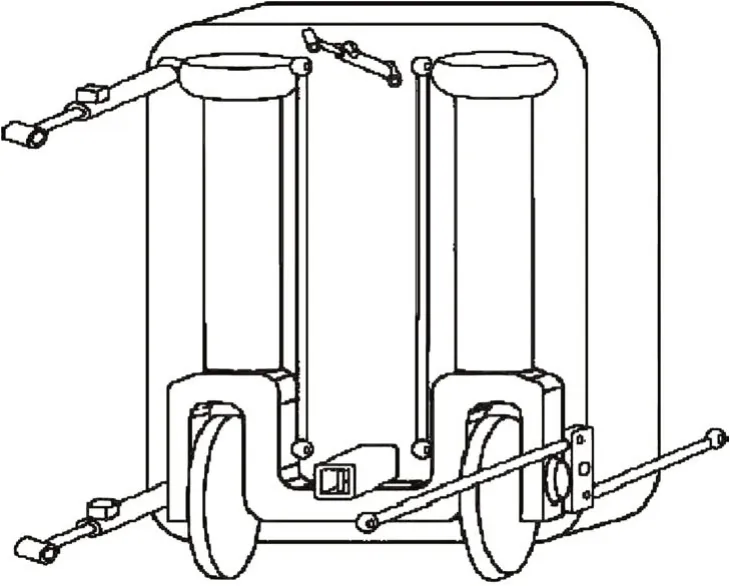
图5 Talgo列车示意图Fig.5 Sketch map of Talgo train
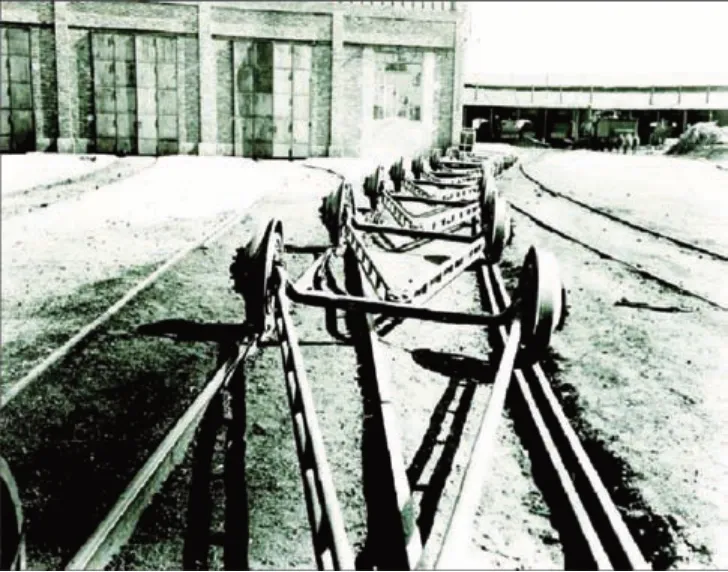
图6 三角拖动式结构Fig.6 Structure of triangle drag
随着城市轨道交通发展,车辆小曲线半径通过性被愈加重视,人们关注于转向架的结构优化设计,使之更好地适应不同线路,但现有的径向转向架逐渐难以满足人们的要求。而从发展趋势上来看,包含主动控制的径向转向架或成为重点研究方向。庞巴迪公司在第六届国际机车车辆转向架大会上提出MECHATRONICS 型转向架的概念,其安装有机电式主动径向装置以及稳定性控制模块,较常规转向架舒适性和稳定性更好[36]。
4 轮对主动控制
上述技术大多依靠车轮重力复原力或某种机构实现车轮的横向复位或径向调整,可被归类于被动导向技术;主动导向技术是指通过控制电机或作动器调节轮对的转速和冲角等,实现独立轮对导向性能的优化。
WICKENS[37]最早提出主动控制,指出可以通过轮对横移量的反馈控制优化独立轮对的导向性能,即通过拉杆连接左右车轮,作动器根据横移量的反馈控制拉杆位置,控制车轮冲角以实现导向性能的优化。限于横向位移测量的困难性,该技术未能普及,但为独立轮对导向的优化提供了一个全新的方向。
GOODALL等[38-42]在WICKENS研究的基础上,研究除轮对横向位移外,如何通过轮对其余状态量(如冲角、转速差等)进行主动控制。其中GOODALL等[38]以独立车轮两轴车为例,提出通过左右车轮的转速反馈,对车轮导向性能进行优化的方法,具体控制思路如图7所示;MEI 等[39-40]将轮毂电机应用于独立车轮的导向优化中,研究如何将导向性与稳定性优化策略结合起来进行独立车轮的集成控制;PEREZ等[41-42]提出将独立车轮的导向优化与牵引结合,通过牵引电机的转矩差控制轮对。
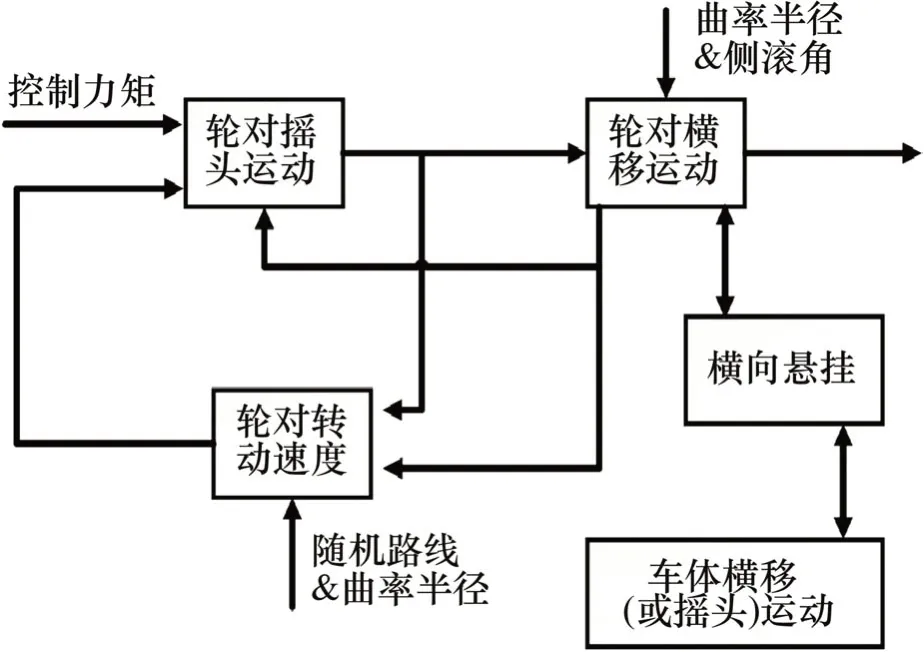
图7 转速反馈控制Fig.7 Speed feedback control
LIANG等[43]在仿真实验的基础上设计了1/5比例的独立轮对模型,发现通过摇头运动的控制能有效改善独立轮对导向性,并且具有较好的稳定性;任利惠等[44]研究使用不同控制量和反馈量的主动控制方案,总结了具有导向能力的方案,并研究了基于PI控制的速差反馈导向优化研究(假设线路信息已知);李红[45]设计一种行星齿轮差速机构对独立轮对进行差速控制;孙效杰等[46-47]提出通过永磁电机直接驱动车轮,实现两侧车轮差速运行。
考虑到控制方案的经济性便捷性,简单易测的车轮转速信息成为研究者们进行独立轮对主动控制研究的首选。任利惠等[48]研究速差反馈对独立车轮的导向优化效果,同时引入PI 控制增益,对系统稳定性控制的进行仿真;李浩天等[49]研究速差控制系数对独立轮对导向性能影响的规律,并给出建议值;BARBERA等[50]介绍一种电子差速转向架(电耦合),通过测量后位轮对角速度差,决定电轴的耦合程度;孙效杰等[51-53]研究电气耦合转向架机理,定义了电轴的耦合刚度系数,并进行数值仿真与试验测试。
关于主动导向的控制方式,可总结为2种:一是通过作动器对车轮施加力矩,使其趋于径向(actuated independently rotating wheels,AIRW);二是通过电机施加牵引力或力矩,改变车轮转速进而引起纵向力、摇头力矩等发生变化,提高轮对导向能力(driven independently rotating wheels,DIRW)。吴泳江[54]对2种方法进行了讨论研究,仿真结果表明,2种方案均能提高独立车轮的导向性能,而在获得车速和线路信息后,AIRW效果明显优于DIRW 效果;BRACCIALI[55]讨论了具有独立旋转导向轮车辆使用转矩控制过曲线的优越性,并与传统转向架结构做了对比;OH 等[56-57]设计独立轮对牵引电机,对绕组槽型做了改良,调制电机输出波形,实现控制左右轮速以产生转矩差进而优化轮对导向,并通过硬件在环试验验证了控制策略的有效性。
随着技术的发展,人们对主动控制也提出了更高要求,如控制系统的鲁棒性以及智能化。杨哲等[58]基于鲁棒性对控制系统进行了设计;MALIKOV[59]提出一种观测器,可应用于解决系统未知输入及不确定干扰问题,或可为独立轮对的主动控制提供一些参考;张珍[60]研究主动控制智能化,设计了基于Android 平台的智能控制终端软件,实现对车辆行驶线路信息的获取、记录以及对车轮速差的控制(见图8),为主动控制应用的发展作出了贡献。

图8 主动控制智能软件Fig.8 Active control of intelligent software
基于对已有研究成果的分析总结,本文作者发现:现有的独立轮对主动控制方法依赖于轮对的状态信息和线路信息的获取。但车辆实际运行时,难以获得一些信息,因此,部分学者致力于研究如何获取控制信息。如LI等[61-63]使用卡尔曼滤波估计轮对及线路信息,但其使用的是全维观测器,系统复杂且成本较高。孙效杰等[64-65]提出了通过降维观测器对轮对状态及线路信息进行估计的方法,选择经济易测的轮对状态信息,估计轮对其余状态,完成轮对的主动控制,控制策略如图9所示。该方法能够通过测量少数状态获取车辆控制所需全部的状态信息,实现经济的控制。而鉴于实际运营情况的复杂性,未来的研究将考虑多种因素,以对控制系统的鲁棒性进行优化,使其能够适应更多工程情况,如传感器失灵,观测器匹配条件无法满足时,如何保证估计系统的作用;传感器错误信息如何识别排除;执行器发生故障时的对策等。未来独立轮对主动控制在保证独立轮对导向能力的同时,控制的经济性与便捷性也将成为相关领域研究者重点关注的问题。
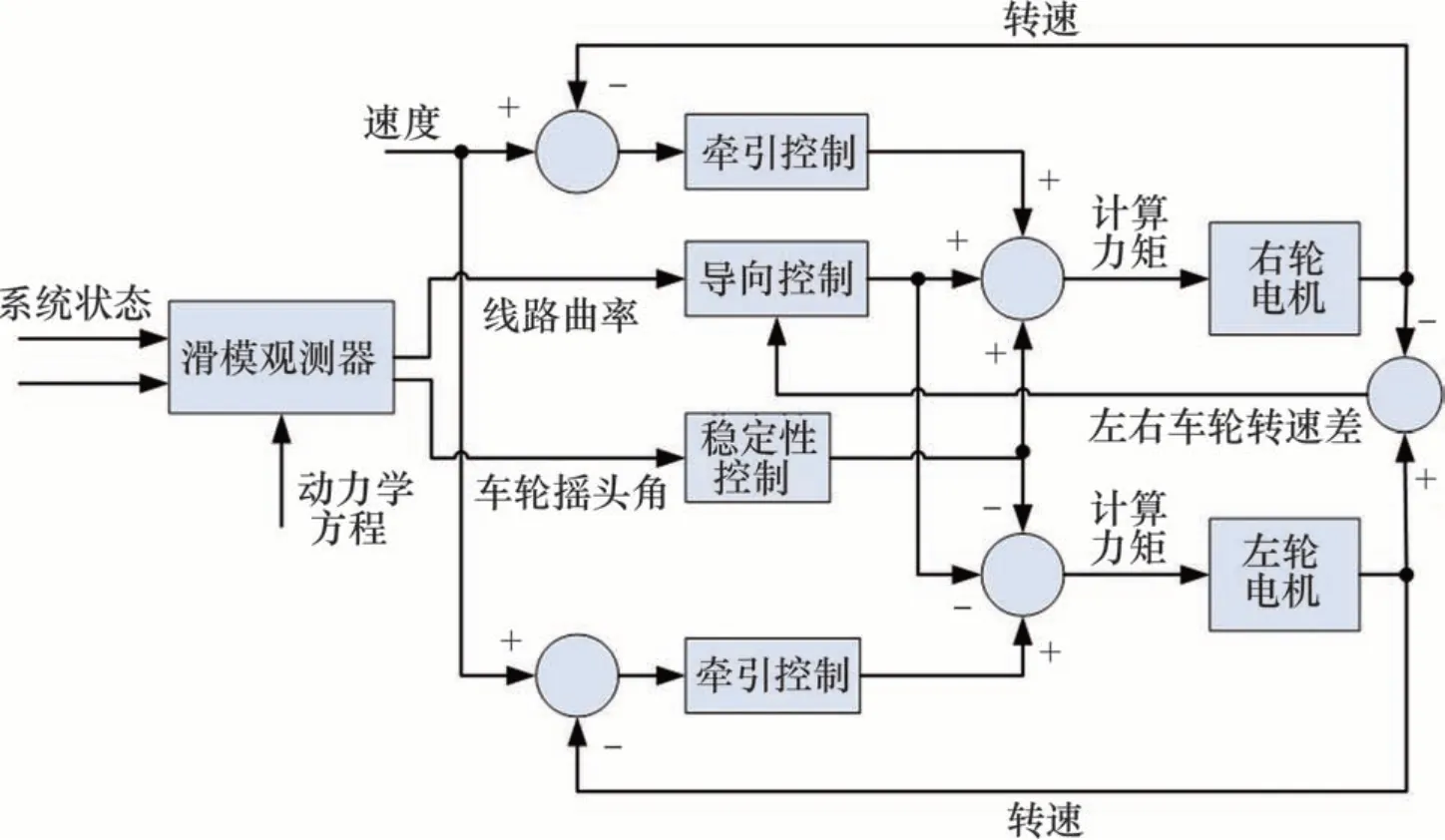
图9 基于观测器的主动控制策略Fig.9 Active control scheme of wheelset via observers
主动控制技术作为轮对导向优化的一大热门方向,虽然存在成本高、难度大、结构复杂等问题,但相较于被动导向技术,其对独立车轮导向性能的优化与可控性更好,能够适应复杂线路的需求。随着研究的深入,主动控制与机械结构改进的结合,可能成为未来独立车轮导向优化的主流方向。
5 总结与展望
独立车轮的导向问题是轨道交通发展中遇到的一个技术难题,人们从轮对自身、辅助导向和控制导向等多个方面对其进行了研究。经过数十年的发展,在导向基础理论、优化机理等方面取得了丰硕成果,大量工程实践也证明了相关研究的有效性,使独立轮的导向性明显提升。
独立轮对导向优化研究在发展迅速的同时,也渐渐遇到了一些问题。如对轮对踏面结构的优化中,通过常规方法(增大接触角差)已经难以提高现有轮对导向性能;转向架结构改进也面临着类似问题;主动控制技术面临空间的限制以及成本问题。对于这些问题,一方面需要相关的理论研究,通过其本身的技术突破来改善现状,另一方面也需要探索新的独立轮对导向优化方法。
关于独立轮对导向在未来的研究与应用,可以预见的是:
1)关于轮对与转向架机械结构方面的改进,仍将被人们所关注,如轮对踏面的改进,转向架结构的优化等;
2)现有理论的深入研究以及新理论的发现,或使得独立轮对导向优化取得突破性的进展;
3)未来独立轮对导向优化的经济性和便利性是理论研究与工程应用的重点关注方向;
4)多种独立轮对导向优化方案的综合是重点发展方向之一;
5)独立轮对导向的优化与轨道车辆其他功能设计的集成优化,如结合牵引控制或稳定性控制或将成为本领域的研究热点。