智能厨房管家的设计
2021-05-17
(华东理工大学 机械与动力工程学院,上海 200237)
0 引言
当今人们对营养健康与烹饪体验的诉求日益提高。糖尿病低龄化、牛奶血等问题的出现,对烹饪经验不足的年轻人提出了严峻挑战[1]。此外,人口老龄化日趋严重,利用智能家居协助老人轻松便捷烹饪三餐,有利于构建和谐社会[2]。然而,复杂繁琐的烹调技法,又制约着中餐制作走向自动化与现代化[3]。
因菜肴特色差异,国外菜肴着重于保持食材的原本特性[4],烹饪机的功能相对简单,大都无法实现中国厨艺中的翻炒功能[5]。极少数能够胜任中式菜肴的烹饪机,如Moley Robot,其原理为通过摄像头捕捉并模仿厨师的动作,功能强但售价昂贵[6]。国内,张少文等[7]通过对人工烹饪过程中锅具的运动分析,提出具有颠锅、晃锅、倾锅等功能的设计方案,但体积庞大不宜家用。家用型炒菜机的相关专利[8-10],大部分只具有简单的加热、焖煮功能,能够烹饪的菜肴有限。因此,亟待设计全自动、多功能、体积小巧、适用于中餐制作的智能厨房机器人,向千家万户开启中国菜肴色、香、味、形的大门。
本文设计了一款智能厨房管家,通过多模块协调运作,实现调料与食材的精准添加与均匀混合。在做到自动化程度高、运行精准稳定的前提下,实现交互友好、合理经济。
1 总体方案设计
工作流程如下:
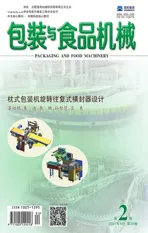
如图1,用户通过语音、触控屏或者APP选择菜谱,发出添加调料指令。首先,液体容器转盘架转动,使得所选液体对应容器上的啮合块与长啮合板相啮合。接着,滑台滑动压动活塞杆,调料通过与液体容器底端接通的液体软管定量挤出。
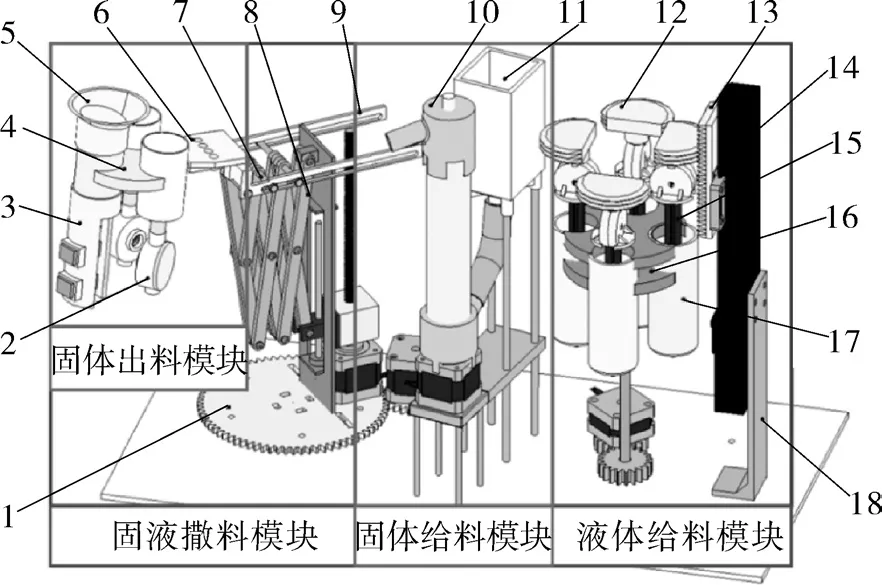
图1 固液调料系统整体示意Fig.1 Overall schematic diagram of solid-liquid seasoning system
与此同时,撒料端连接杆的伸缩与从动转盘的旋转相配合,通过复合运动使调料添加更加均匀。针对大颗粒调料,采用转轮出料机构,将调料定量可控地撒入锅内。小颗粒调料采用双电磁隔膜阀出料机构,上下两个电磁铁依次动作完成对粉末调料出料的精细把控。
另外,针对大用量调味料,采用螺旋输送机构,实现从固体粉末调料储罐到使用前端的定量送料。给料时,伸缩臂旋至特定位置,小颗粒接收机构可以自动测满并向螺旋输送机构发出停止加料指令,伸缩臂自动复位。
配合由倾倒机构和搅拌机构组成的倒菜翻炒模块,实现食材的分步、按时、定量添加与均匀混合。
2 各模块单元设计
设计的智能厨房管家的机械结构可分为5个核心模块:液体给料模块、固体给料模块、固液撒料模块、固体出料模块、倒菜翻炒模块。
2.1 液体给料模块设计
功能:实现多种液体调料定量挤出与吸入。优势:结构紧凑、出量精准、连续高效。
如图2所示,当机器接收到添加调料指令后,液体给料模块开始运转。首先,步进电机旋转指定角度,传动至液体软管架,使得相应的液体容器上的啮合块与长啮合板相啮合。紧接着,滑台通过内置丝杆-步进电机组块的驱动,带动长啮合板向下移动特定距离,迫使与之啮合的啮合块向下运动,通过位于液体容器内的活塞杆将液体调料挤出,与出口相连的液体软管联通洒料端,将液体调料洒向锅内,实现液体调料的精准添加。

图2 液体给料模块结构Fig.2 Structural diagram of liquid feeding module
啮合块与长啮合板的设计,既通过稳固的配合实现了移动距离的精准传动,又巧妙地实现了不同液体容器转换配合的无缝衔接。转换高效、出量精准。
2.2 固体给料模块设计
功能:完成从存储装置到使用前端的定量送料;优势:结构精巧、高效低耗、自检续加。
如图3所示,针对使用量较大的固体粉末调料,设有可自动上料的固体给料模块,该模块的核心是螺旋输送机构,上料步骤的具体流程为:固体粉末颗粒从大容量调料储罐落入螺旋输送机入料口后,颗粒群在螺旋叶片的旋转推拨下,从输送管底端升至顶端,并从螺旋输送机出料口落到小颗粒接收机构,接收机构的红外传感器检测到料满后,直流电机停转,上料过程结束。
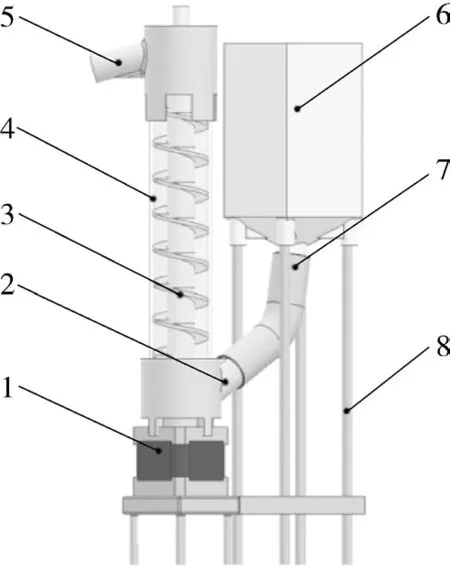
图3 固体给料模块结构Fig.3 Structural diagram of solid feeding module
针对螺旋输送机构,选择其驱动电机并确定螺旋叶片设计参数如表1所示。
表1 相关参数取值Tab.1 Relevant parameter values
大量试验表明,由于物料对于管壁的摩擦力,颗粒与螺旋叶片产生相对运动,从而使得径向相邻颗粒间产生滑动,远离螺旋轴的物料逐渐影响到内部的物料[11]。选用500 r/min的直流电机,超过物料与螺旋叶片发生相对滑动的临界转速[12],满足设计需求。
2.3 固液撒料模块设计
功能:进行固液体调料的均匀撒料。优势:占用空间小、活动范围大、结构分布好。
如图4,固液撒料模块主要由剪叉式伸缩臂和水平旋转组件构成。其运作流程:丝杆在步进电机的驱动下旋转,使得滑块沿滑动导杆移动,剪叉式伸缩杆组相应地被拉长或缩短。撒料时,控制系统根据锅的尺寸与将撒调料的种类规划前端路径,并转化为丝杆步进电机和主动齿轮步进电机控制信号,控制悬臂伸缩与转盘旋转,通过复合运动实现均匀撒料。
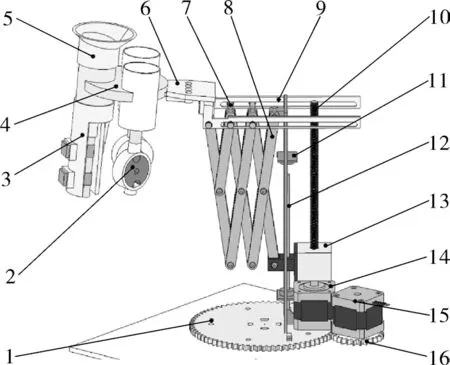
图4 固液撒料模块结构Fig.4 Structural diagram of solid-liquid strewing module
伸缩悬臂的设计结构分布合理,保障了使用的安全性与持久性。利用ANSYS软件对悬臂系统最大形变、最大应力进行求解分析。
如图5,取悬臂最长伸长状态为最危险情况,在悬臂前端加10 N压力(大于撒料前端所能提供最大压力),应变最大处为悬臂最前端,数值为0.022 661 m,此应变不对运转造成影响,结构合理。
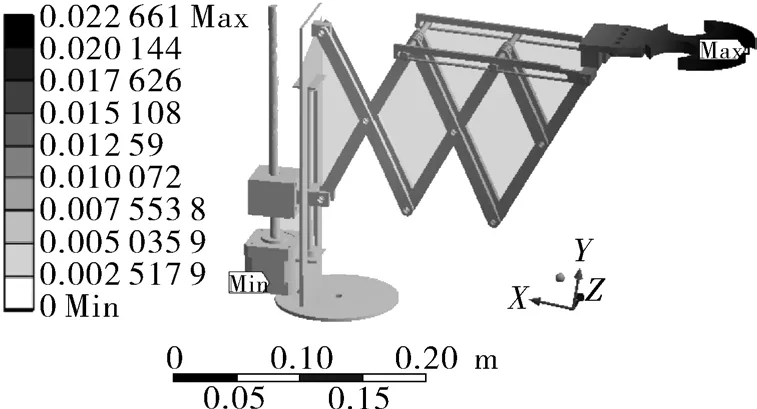
图5 伸缩悬臂应变云图Fig.5 Strain nephogram of telescopic cantilever
在最危险情况下,对伸缩悬臂整体进行应力分析,在悬臂前端加10 N压力,结果如图6(a),可知最大应力集中在滑动导杆上,最大应力为192.85 MPa。导杆使用材料为:45钢。查表得45钢抗拉强度σb为 600 MPa[13],屈服强度σs为 355 MPa,均大于导杆最大应力,因此满足强度要求。
由于伸缩臂结构轻巧的需要,剪叉式伸缩杆采用强度较弱的亚克力板,与上文施加相同条件,单独分析连杆部分应力。分析结果如图6(b),连杆最大应力为8.93 MPa。查表得亚克力板拉伸强度 70 MPa[14],远大于连杆所受最大应力,因此满足强度要求。

图6 伸缩悬臂与剪叉式伸缩杆应力云图Fig.6 Stress nephogram of telescopic cantilever and scissor telescopic rod
2.4 固体出料模块设计
功能:保证大小颗粒调料流畅出料、用量精准把控。
如图7,针对易阻塞于狭缝的小颗粒固体调料,如糖和盐,采用双电磁隔膜阀出料机构。电磁隔膜阀带动上闸板开启,下闸板关闭,调料在重力作用下落至乳胶管内的两闸板之间,接着下闸板开启,上闸板关闭,调料落入锅内。如此设计,保证了每次出盐量为1 g。

图7 固体出料模块结构Fig.7 Structural diagram of solid discharging module
针对大颗粒固体调料,如胡椒粒,采用转轮出料机构。转轮在舵机带动下180°往复旋转,上方的凹槽旋至下方,将凹槽内的调料撒向锅内,同时原位于下方的空凹槽旋至上方,自动完成上料,保证流畅出料。
2.5 倒菜翻炒模块设计
功能:实现食材的分步、按时、定量添加与均匀混合;优势:用量控制精准、食材混合均匀、结构小巧灵动。
如图8所示,倒菜翻炒模块由倾倒机构和搅拌机构组成。其运作流程为:用户先向四个盛放食材的翻斗状食材盒中添加食材,与此同时,OLED显示屏通过食材盒底部压力传感器的反馈,精确显示食材的质量,方便使用者将食材定量加入。食材加入完毕,驱动四杆联动机构的舵机按照系统预设的食材烹饪顺序和时间依次动作,将食材加入锅中。倒菜动作完成后,机械悬臂在双轴舵机的带动下旋转90°,使锚式搅拌桨叶片水平。紧接着,步进丝杆滑轨使机械悬臂下降直至搅拌桨叶片与锅壁贴合,直流电机带动桨叶转动,实现食材的均匀混合。
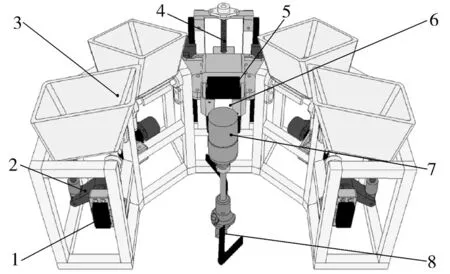
图8 倒菜翻炒模块示意Fig.8 Schematic diagram of stirring module
四杆联动机构的采用,小巧美观。现将翻斗状食材盒底面简化为与机架相连的摇杆进行分析,已知食材盒底部两转动副圆心距离CD为67 mm,机架长度AD为101 mm,曲柄AB长度为53 mm,连杆长度BC为95 mm。在SolidWorks中新建运动算例,选定舵机A为原动件,选择运动方式为匀速转动,转速60 r/min,对食材盒轨迹进行追踪。根据图示弧线运动轨迹可知,食材盒的运动轨迹连续光顺、过程平稳流畅,可以很好满足食材倾倒入锅的需求。
考虑到食材和调料具有黏度高的特点,为保证均匀混合,采用锚式搅拌桨。此种搅拌桨的桨叶外缘形状与锅内壁形状一致,搅拌时不易产生盲区[15]。为提高搅拌均匀度和提升搅拌效率,区别于传统的锚式搅拌桨无轴向混合的平行桨叶结构,本装置采用桨叶20°倾角的设计。试验证明,相同条件下该倾角桨叶单位体积混合能最低[16-17]。
3 控制系统与交互界面
3.1 控制系统的组成及控制流程
如图9所示,固液调料系统主要由控制器Arduino、人机交互界面HMI、各类传感执行元件、及配套通信、电源系统组成。通过接受来自人机交互界面的控制指令,控制器精确控制各执行元件,实现了固、液体调料的可控、定量添加。
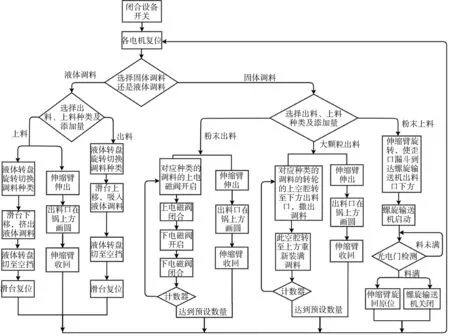
图9 固液调料系统控制流程Fig.9 Control flow chart of solid-liquid seasoning system
倒菜翻炒模块在运行过程中接受用户指令并据此完成相应动作,借助重力传感器、计时器和显示屏实现对食材加入与加工的智能控制及与用户的友好交互。
3.2 人机交互界面
智能厨房管家拥有人性化的交互界面,可通过语音、触控屏或者APP选择菜谱,系统预设了海量调料配方,涵盖八大菜系并可根据大数据生成个性化口味偏好,将中餐菜谱中所谓“些许”、“少量”等含糊用语数字化,变成机器可以理解的语言。
4 结语
本文设计的智能厨房管家,借助精巧的机械结构与智能的交互系统,将五个核心模块协调运作,强大的功能设计全面覆盖厨房情景,杰出的运行效果保证愉快料理体验。结构考究、微缩高能,体积小巧完美迎合厨房需求。
该装置现已有国家专利:外观设计专利(ZL201930238930.4),发明专利(ZL201910408540.6实质审查阶段),实用新型专利(ZL202021911685.2),实物样机获得了2020第九全国大学生机械创新设计大赛二等奖、2020中国大学生机械工程创新创意大赛三等奖、2019上海市大学生机械工程创新大赛一等奖、2020中国“互联网+”大学生创新创业大赛校二等奖,并代表高校参展2020中国国际工业博览会。