时变强多途干扰下基于差分编码的水声OFDM通信算法
2021-05-17邢延超丁寒雪LuJin李泽群何司宇
邢延超,丁寒雪,Lu Jin,李泽群,3,何司宇
(1.青岛理工大学 信息与控制工程学院,山东青岛266000;2.Laboratory of Wireless Communication, School of Electrical, Electronic and Computer Engineering, University of Western Australia, Perth Australia;3.School of Electrical and Electronic Engineering, University of Technology, Sydney Australia)
0 引 言
水声信道具有时变和强多途特性[1],水声信道时变特性使得水声信道变化剧烈,常规的水声信道估计和均衡算法失效;水声信道强多途特性导致接收信号大幅度展宽,水声信道估计和均衡难以获得有效的估计和解码效果。
针对水声信道估计和均衡问题,国内外多家机构进行了大量的相关研究。国外,针对水声信道估计问题,Y.R.Zheng[2]提出基于改进的比例归一化最小均方水声信道估计算法。针对水声信道均衡问题,M.Stojanovic[3]提出自适应判决反馈均衡算法。Y.R.Zheng[4]提出频域Turbo均衡算法。国内,针对水声信道估计问题,乔钢提出了基于基追踪去噪的稀疏水声信道估计算法[5]和低复杂度的OMP水声信道估计算法[6]。针对水声信道均衡问题,殷敬伟[7-9]进行了盲虚拟多途干扰消除研究。鄢社锋[10]提出免信道估计的双向Turbo均衡算法。何成兵[11]提出了频域和时域混合的Turbo均衡算法。
总的来说,水声信道估计研究集中在压缩感知框架下的OMP、基追踪等算法和稀疏优化自适应框架下的改进的比例归一化最小均方算法。水声信道均衡研究集中在Turbo均衡类、盲均衡类等算法。然而,这些算法仅解决了时不变和缓慢时变水声信道估计和均衡问题,针对时变水声信道估计和均衡问题,国内外的研究成果都相对较少。这是因为时变信道下水声通信的一个关键难点是:收发节点相对运动时,水声信道剧烈变化,上述信道估计和均衡算法已不再适用。因此,本文提出了基于差分编码的水声OFDM通信(Underwater acoustic OFDM communications based on differential coding, DC-OFDM)算法,构建了抗时变多途的通信体制,消除水声信道估计环节,直接进行解码判决(均衡,检测,估计),实现了时变强多途水声信道下的可靠水声通信。
1 DC-OFDM算法原理
DC-OFDM算法原理如图1所示,将串行的数据(每块数据占用带宽B,传输时间Tb)转换到M路并行子信道上传输,每块数据占用宽度变为B/M,传输时间变为MTb,减小多途时延的影响;在数据块之间插入循环前缀(Cyclic Prefix, CP),当CP长度大于最大多途时延,多途时延不会扩展到下一个数据块,从而避免多途干扰。因此在时变强多途干扰下,DC-OFDM算法性能较好。

图1 DC-OFDM算法原理Fig.1 Principle of DC-OFDM algorithm
DC-OFDM算法系统结构如图2所示。在发送端,源码 s经过信道编码、交织后,得到交织比特s′;经过串并转换、DQPSK映射和相位编码后,得到符号d;再经过IFFT变换后,得到时域发送序列x(m);加CP、并串转换、加同步信号、D/A转换后,得到模拟信号x~ (t),通过换能器发出。在接收端,接收信号y~(t)经过A/D转换、同步检测、串并转换、去CP后,得到时域接收序列 y (m);经过FFT变换后,得到符号再经过DQPSK相位解码和解映射、并串转换后,得到数据比特sˆ′;解交织、信道解码后,可得源码估计值sˆ。
发射端如图2(a)所示,源码s经过信道编码、交织后,得到交织比特s′;串并转换后进行DQPSK映射和相位编码,得到符号d=[d0,···,dk,···,dK-1];将d放置到通频带的前半部分,d的共轭放置到通频带的后半部分,然后逐列进行M点的IFFT变换:

得到时域矩阵为:

其中,m=0,···,M-1,k=0,···,K-1;加循环前缀、并串转换、加同步信号、D/A转换后,可得发送的模拟信号x~ (t)。
常用的时变多途水声信道模型如下[12]:

其中,时变水声信道多途数为P,第p条路径的增益为Ap(t),时延为 τp(t),噪声为n(t)。

图2 系统结构Fig.2 System structure
经过水声信道后,得到接收信号为:

接收端如图2(b)所示,先进行A/D转换、同步检测、串并转换、去CP后,得到时域接收矩阵为:

进行FFT变换:

2 仿真试验
南海实测水声信道如图3所示,横轴表示时域抽头数,纵轴表示归一化幅度。系统参数设定如表1所示。传输数据结构如图4所示,1帧数据由多块数据构成,每块数据由循环前缀(网格表示,CP1,CP2,…,CPn)和有效传输数据(D1,D2,…,Dn)构成,同步头、同步尾采用线性调频信号,LFM1为幅值1V的线性调频信号,LFM2为幅值0.6V的线性调频信号,这是为了避免同步检测时检测到同步尾。
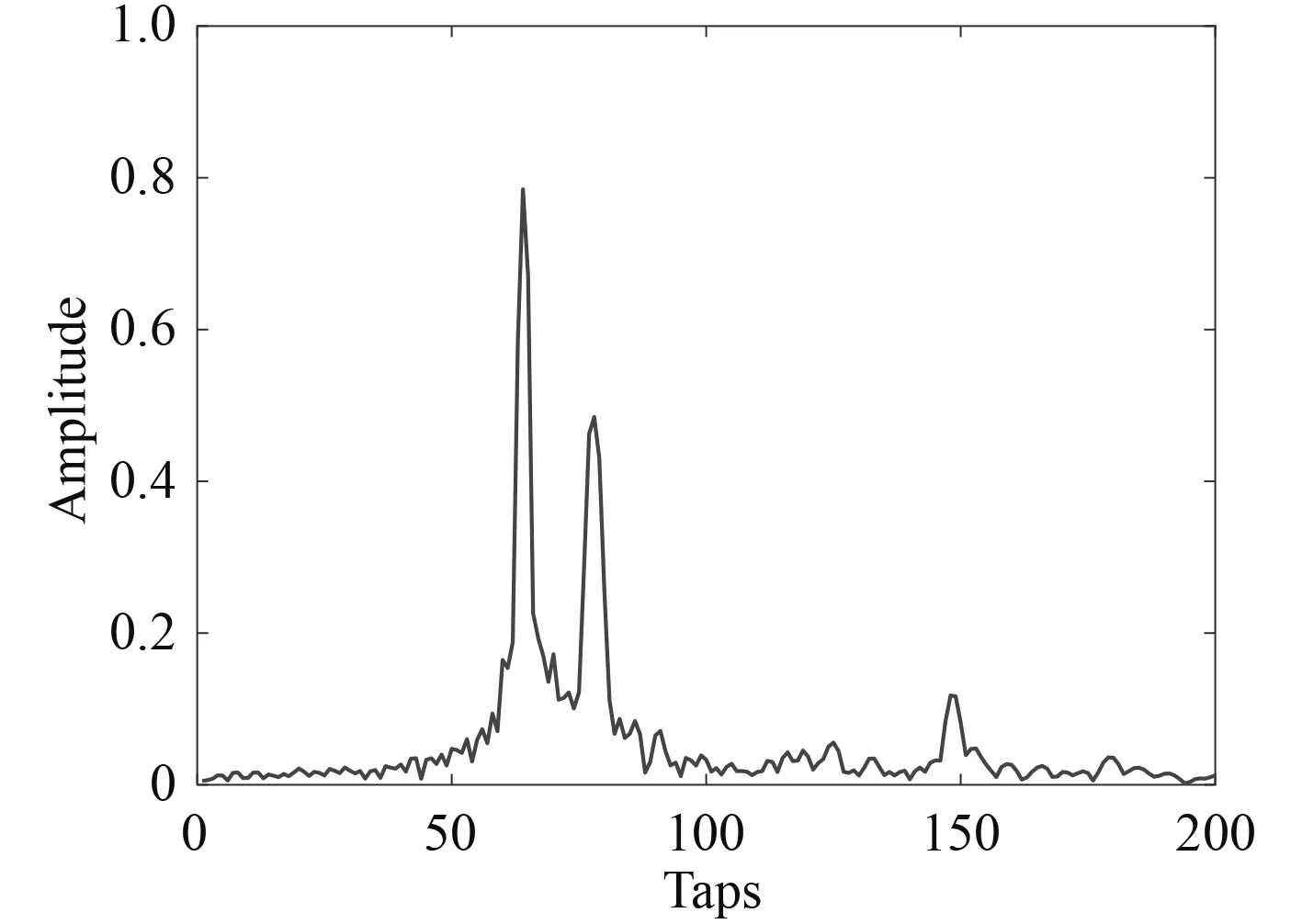
图3 实测南海信道Fig.3 Measured south china sea channel

表1 DC-OFDM系统参数Tab.1 DC-OFDM system parameters
3种编码方式性能对比如图5所示,横轴表示信噪比(Signal Noise Ratio, SNR),纵轴表示100组仿真试验平均误码率(Bit Error Rate, BER)。DBPSK解码性能好于DQPSK,DQPSK好于D8PSK;DQPSK比DBPSK频带利用率更高,比D8PSK抗噪声性能更好,因此在水箱试验时选择性能折中的DQPSK。信噪比为8dB时,DQPSK100组仿真试验全部正确解码。

图4 传输数据结构Fig.4 Structure of transmitted data

图5 三种编码方式性能对比(100组)Fig.5 Performance comparison of three coding methods (100 groups)
3 水箱试验
水箱长1.16 m宽0.76 m高0.62 m,试验设定如图6所示。换能器、水听器布放如图6(a)所示,收发节点水平距离0.4 m,换能器和水听器布放深度0.5 m。时变信道构造过程如图6(b)所示,试验时用水盆在水面划水,造成水面波动,增强信道时变性。系统参数设定、传输数据结构同仿真。

图6 试验设定Fig.6 Experiment sets
水箱试验如图7所示。水箱随机信道如图7(a)所示,其中横轴表示时域抽头数,纵轴表示归一化幅度,对比图3可知水箱信道具有强多途干扰。发射及接收信号如图7(b)和图7(c)所示。
由于收发节点距离较近,环境噪声较小,所以接收信号信噪比较高。试验10次,每次发射不同的数据,解码均为0误码。任取其中一组接收数据作为基准(由于信噪比较高,此时可近似当成无噪声处理),人为加入随机高斯白噪声,获得信噪比0~16 dB的接收信号。采用所提算法,解码性能如图7(d)所示,横轴表示信噪比,纵轴表示DQPSK100组水箱试验平均误码率。信噪比为15dB时,100组全部正确解码。从水箱试验可看出:所提算法可有效适用于时变强多途干扰的水声信道,可解决水声信道时变强多途干扰问题。对比图5可看出:所提算法在水箱通信时的性能弱于南海实测水声信道仿真时的性能,这是由水箱通信时的时变强多途干扰造成。

图7 水箱试验Fig.7 Water tank experiment
4 结 语
本文提出了时变强多途水声信道下的DC-OFDM算法,利用循环前缀技术以及OFDM通信技术固有的抗多途特性,可有效消除时变多途干扰。南海实测信道仿真和水箱试验结果表明:所提算法可有效解决水声信道时变强多途干扰的问题,实现可靠水声通信。
