新型非接触式行波传感技术研究
2021-05-14冯培磊刘晓欣陈潇雅徐天奇普碧才王鲲鹏
冯培磊,刘晓欣,陈潇雅,徐天奇,普碧才,王鲲鹏
(1.国网新源安徽金寨抽水蓄能有限公司,安徽省六安市 237000;2.云南民族大学 电气信息工程学院,云南省昆明市 650500;3.南方电网产业投资集团有限责任公司,广东省广州市 510000;4.云南电网公司怒江供电局,云南省怒江县 673200 )
0 引言
配电网与用户联系紧密覆盖面广,目前多采用人工巡线的方式查找故障耗时较长,如果不能够及时准确排除故障点,容易引发连带的多重故障,甚至导致大面积停电。尤其在天气恶劣的条件下,严重危及电力系统运行安全,不能满足智能配电网发展要求。小电流接地系统在发生单相短路故障后可短时带故障运行,但故障定位费时费力[1]。配电网智能化可以有效提高供电可靠性、降低运维人力投入,是当前的发展趋势。
由于怒江大峡谷地貌复杂,山高坡陡、地势险要、天气恶劣等因素存在,配电网线路距离长、配电网网架结构复杂,故障点高效查找是难题,具体体现在排除区域广、排除时间长、投入人材机量大、停电时间长、负荷损失多。本文着眼于新型非接触式传感技术,从缩短定位时长、提高定位精度出发,对传感技术进行了深入的研究与应用。
1 行波的产生
从图1中可以看到在配电网的电力线路中由故障点本身的电压瞬间变化所产生的故障行波信号。在接地的故障点的电压将降为零的接地情况为金属性接地[2],这种情况可以将电网视为两个网络的合并运行进行分许,其一为正常分量的电网运行时的网络,其二为故障分量下的网络,在图1(d)中,故障状态下的行波电压源为-UF,这个附加在故障网络中的行波电压源意义在故障点产生行波信号,沿着线路向两端以接近于光速传输[3]。

图1 输电网络故障网络行波示意图Figure 1 Schematic diagram of traveling wave in fault network of transmission network
通常分析下,一般设置线路在发生接地故障时从外部角度来看所测得的故障接地阻抗视为R,图2中在接地故障点产生故障时,初始的电压行波信号会向线路两端传输整个行波的第一个行波电压以及电流信号,这个时候的故障行波的波头幅值大小可以按式(1)~式(3)计算:

图2 故障初始行波及其传输Figure 2 Initial traveling wave and its transmission

在上式中对电力线路正常状态下的未故障时该点对地所产生的电压用ef,产生故障时的初相角用θ来表示,在该点发生接地故障时会产生对地的电压,用U来表示,在该故障点故障过程中产生的对地的电流用If来表示,从故障点的角度来看,故障点对地的电阻即为过渡电阻用R表示[4]。在电力线路中,波在线路中传输的状态用波阻抗表征,即为Zc,它与阻抗具有同一量纲,但不消耗能量。通常电缆线路的波阻抗要比架空线路的波阻抗小,前者根据标准可知为200Ω,后者为300Ω。
2 磁电阻选型
选用TMR2701芯片设计非接触式行波传感器,如图3所示。芯片采用推挽式Wheatstone电桥结构,这种结构相比其他结构而言更特殊。在芯片内部,有4只磁势能裸露条件下的隧道磁敏元件。如果外部磁势能与传感器灵敏角度一致,且磁势能时域变化的情况下,Wheatstone电桥输出一个电压,该电压为差分电压,并且该输出具有良好的温度稳定性。输出曲线如图3所示。传感器检测灵敏度非常高,可适应-30~130℃高温带的工作温度范围,有着宽动态范围,较低功耗[5],极低的磁滞和宽工作电压范围以及极低的本底噪声,广泛运用在微弱磁势能检测、电流传感器和定点传感器中。

图3 TMR芯片实物及输出曲线Figure 3 TMR chip and output curve
3 新型非接触式传感器硬件电路设计
TMR是最重要的子系统,用来从制导与引信系统中获取目标信息。探测灵敏度的高低对该系统的目标探测整体性能起了决定性的作用[6]。探测灵敏度主要由两个因素决定:一是传感器本身的灵敏度,本文中采用的TMR传感器相对于传统磁性元件在特性上具有天然优势;二是TMR传感器电路设计的灵敏度。因此,是基于微弱磁势能探测的原理及背景,侧重探索如何提高系统探测电路灵敏度,改进技术。如图4所示为信号调整电路的原理框图。信号调整主要由信号的放大和滤波两部分组成,在两者之间加入运放跟随电路用来增加信号的驱动能力同时也能起到电路模块间相对的隔离作用,以此增大电路的抗干扰能力。

图4 信号调整电路原理框图Figure 4 Schematic diagram of signal adjustment circuit
3.1 放大电路
由于TMR中的Wheatstone电桥的输出端输出信号小,无缓冲且驱动能力较弱;使用TMR作为磁传感器来输出信号需要在Wheatstone电桥后端的放大电路中选择仪表放大器,由于这种芯片对弱信号具有较好的驱动信号的作用。如图5所示的A1、A2、A3三个运算放大器组成了仪表放大器[7]。
具有对称结构的差分输入端由具有对称结构的A1、A2组成,如图5所示,当R1=R2,R3=R4=R5=Rf[8]时,在理论上,这时的差模增益Ad为:


图5 仪表放大器原理框图Figure 5 Schematic diagram of instrument amplifier
当输入的信号为共模信号,RG处于断开状态;A1、A2为电压跟随器,其共模增益为1,增加了信号的驱动能力。A3的作用是将A1、A2输出端的差动转为A3的输入信号,由A3转化为单端信号,电阻Rf的匹配精度决定了共模抑制精度。
采用仪表放大器AD8421对敏感信号进行放大,而AD8421是一款具备低功耗、超低偏置电流、低成本、噪声极低的高速仪表放大器。若所需信号的频率为20kHz[9],在放大器增益为1的情况下,AD8421的共模抑制比值为80dB,也就是说差模增益是共模的一万倍,且该芯片的共模抑制比会随着其放大倍数的增加而增加,故该芯片具有非常良好的共模抑制能力。在运放的放大倍数小于100时,它的增益带宽积为10MHz,不仅满足了运放倍数的要求,也满足信号的带宽需求。
信号放大电路图如图6所示,当放大器的增益设置为22时,电阻R1决定了运放的增益G。

运放的输出电压见式(6):


图6 信号放大电路Figure 6 Signal amplification circuit
芯片的参考端REF引脚定义了参考电压VREF;将参考端直接接地,即VREF=0,则输出电压[10]见式(7):

当目标信号的强度较低时,仪表放大器调整电路需要处理可能会存在的不断增加射频干扰信号,如果存在较大的射频干扰信号,会首先导致被仪表放大的输入级整流[11],会体现出直流失调的误差,这种信号在其输出端加入低通滤波部分也不能去除这个误差。本文中的差分输入端需要加入射频干扰滤波器,主要目的为:①在输入端尽可能地去除射频能量;②平衡地和每个输入端之间的交流信号;③为了避免对输入信号源的带载能力需在测量带宽内保持足够高的输入阻抗[12]。
如图6所示,在反相端之前加入由R2和C2构成低通滤波器电路,在同相端之前加入由R3和C3构成低通滤波器电路。需要匹配好两个低通滤波器之间的截至频率,如果匹配不好,则会造成共模信号易转化为差分信号,产生误差。电容C4放置在C2与C3之间,处于输入与输出间,其作用是为了能在一定程度上降低低通滤波器的匹配,按照以往经验,C4的值至少为C2的10倍。输入端的抗射频干扰的滤波器有差分带宽和共模带宽两种。

两个RC低通网络决定共模带宽BC两个输入与地之间的共模信号带宽[13]:

3.2 滤波电路
TMR磁传感器输出的信号中存在大量高频的噪声信号,加上传感器周围存在的电磁干扰以及电路本身中的电阻、电容、半导体等器件都会产生一定的噪声会造成影响[4],导致最终输出的信号中存在一些非真实的高频信号,这类高频干扰信号经过放大后,对行波信号的检测灵敏度干扰极大,从而影响测量精度。在传感器的输出端加入低通滤波器变得重要,以此来消除或削弱这类不需要的高频信号的干扰,从而提高检测精度,提高传感器的输出特性。
适用于TMR磁传感器的低通有源滤波方式主要有以下三种:Bezier滤波、切比雪夫和Butterworth滤波[14]。滤波器的阶数相同的情况下,Butterworth滤波器在其通带内最平坦,而其阻带下降慢。切比雪夫滤波器的通带具有等纹波特性,通带中波峰和波谷之间的幅度响应的差异永远相同,且阻带较Butterworth滤波器与Bezier滤波器下降快。Bezier滤波器的优势着重于相频响应,幅频响应的通带具有等纹波,其阻带下降慢。本文所选的低通滤波器需在以下两方面满足要求:①在通带内的输出与输入之间的比值需保持稳定,也就是所需的通带增益应小;②考虑过渡带经过滤波电路后的衰减速度,所需的衰减速度为在满足截至频率条件下,衰减速度越快越好[15]。为满足以上两个条件,同时加强滤波器对高频信号的抑制性能,切比雪夫低通滤波器更适合。根据工程经验,选择具有4阶切比雪夫低通滤波器LTC1563-2,具体电路如图7所示,分析得图7的截至频率范围为256Hz<Fc<256kHz,本文中截至频率设为20kHz,而4阶切比雪夫滤波器频率响应波特图如图8所示。

图7 滤波电路原理图Figure 7 Schematic diagram of filter circuit

图8 滤波电路频率响应波特图Figure 8 Baud diagram of frequency response of filter circuit
4 实验测试
4.1 频率特性测试
新型非接触式行波传感器样品实物图见图9(a),传感器尺寸内宽25.24mm、内深57.73mm、内卡槽宽1.6mm,体积小巧,安装灵活,可带电作业。
AFG3251信号发生器作为信号输出源,搭建非接触式传感器测试平台,见图9(b)。

图9 非接触式行波传感器实物及实验测试Figure 9 Physical and experimental test of non-contact traveling wave sensor
采用高频正弦波进行测试。调整信号发生器输出频率,测量传感器输出电压见图10。
从图10中可看出,该非接触式传感器可正确传变高达50MHz信号,检测灵敏度达毫安级,按理论计算,可检测配电网过渡电阻高达8kΩ的接地故障,优于目前配电网故障定位装置指标。

图10 正弦波下不同频率波形图Figure 10 Different frequency waveforms under sine wave
4.2 现场真型环境测试
为了更好地测试研究的新型非接触式传感技术的可行性,针对现场实地箱式变压器接地线(扁铁)固定传感器的问题,设计了一款卡扣式的行波传感器进行技术验证,卡扣式行波传感器实物图如图11所示,卡扣式行波传感器实验测试图如图12所示。

图11 卡扣式行波传感器实物图Figure 11 Physical diagram of buckle type traveling wave sensor

图12 卡扣式行波传感器实验测试图Figure 12 Test chart of clasp traveling wave sensor
实验验证后针对怒江实际箱式变压器情况,进行了模拟现场真型环境测试,如图13所示。
在怒江福贡县10kV架科底线,选取10kV穷扒依独支线T维独村支线2号杆的维独1号公用箱式变压器安装了行波装置及传感器装置,设定170杆(代替选取台区的杆号)为初始杆,164杆为终杆,采用行波发生器模拟输出故障行波,故障定位后台系统记录测试结果,传感器可行性及模拟故障定位分析如图14~图18所示。

图14 第1次试验弹窗截图Figure 14 First test shots screenshots
图15 第2次试验弹窗截图Figure 15 Screenshot of the second test
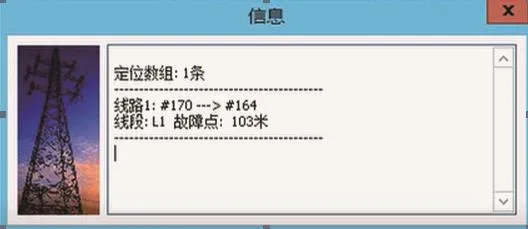
图16 第3次试验弹窗截图Figure 16 Screenshot of the third test

图17 第4次试验弹窗截图Figure 17 Screenshot of the fourth test

图18 第5次试验弹窗截图Figure 18 Screenshot of the fifth test
正向定位结果通过数据计算最大为132.4m,负向定位结果最小为103m;模拟故障点距离170号杆115m;得出定位误差在-12~+17.4m。仿真结果证明新型非接触式传感技术可行,对故障行波的感知度良好,结合故障行波装置定位结果在100m内,符合要求。
5 总结
本文主要研究一种新型非接触式行波传感器的配电网故障行波定位技术,无须与配电网高压一次设备直接连接,在高压导线附近,即可感知故障行波信号,布点灵活,行波采集电位不受一次设备条件限制,因此信号采集可靠性更高;结合怒江配电网实际情况,如地貌复杂、山高坡陡、地势险要、天气恶劣,且配电网线路距离长、配电网网架结构复杂等实际问题、开发出配有新型非接触式传感器的行波故障定位装置,能大大降低因高耗时故障查找造成的停电损失,节约人工成本、减少安全风险、提高供电可靠性。
