约束秩亏间接平差模型的虚拟观测算法
2021-05-13肖东升
谢 波,肖东升
(1.合肥职业技术学院 建筑工程学院,安徽 合肥 238000;2.西南石油大学 土木工程与测绘学院,四川 成都 610500)
在测量平差时,如果控制网没有起算数据,则此时建立的间接平差模型的系数矩阵列秩亏,法方程系数矩阵也会出现秩亏。为了得到秩亏的间接平差模型的最小二乘唯一解,进行大地测量数据处理时往往会利用参数间存在的一些已知的先验信息建立约束条件,此时建立的平差模型为约束秩亏间接平差模型[1-4]。
约束秩亏间接平差模型广泛应用于大地测量数据处理中,其算法引起较多研究。目前,其算法主要分为:①对参数估计修正的有偏估计方法,如岭估计和主成分估计[5-8]。由于引入了未知的岭参数、需要确定主成分的个数等,是一个迭代计算过程;②对秩亏间接平差模型的法方程系数修正的虚拟观测法[9-10]、参数分类法[11-12]、正则化法[13-15]、截断奇异值法[16-17]。该类方法需要确定虚拟观测值的权、正则化因子和截断奇异值个数等,计算过程比较复杂;③对约束秩亏间接平差模型的分块法方程系数矩阵求逆的广义逆矩阵法[18-19]、直接法[20-21]等。该方法具有相对计算简单、结果准确等特点,但是缺少更深入研究。
本文提出利用矩阵运算推导约束秩亏间接平差模型的分块法方程系数矩阵求逆的直接显性表达式,并提出消除秩亏间接平差模型的法方程系数矩阵秩亏的虚拟观测算法,用数据实验验证直接显性表达式和虚拟观测算法的正确性。该方法为约束秩亏间接平差模型的算法提供了新的方法和思路。
1 约束秩亏间接平差模型的一般解析式
约束秩亏间接平差模型表示为:

(1)
(2)
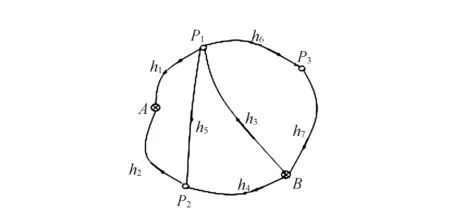
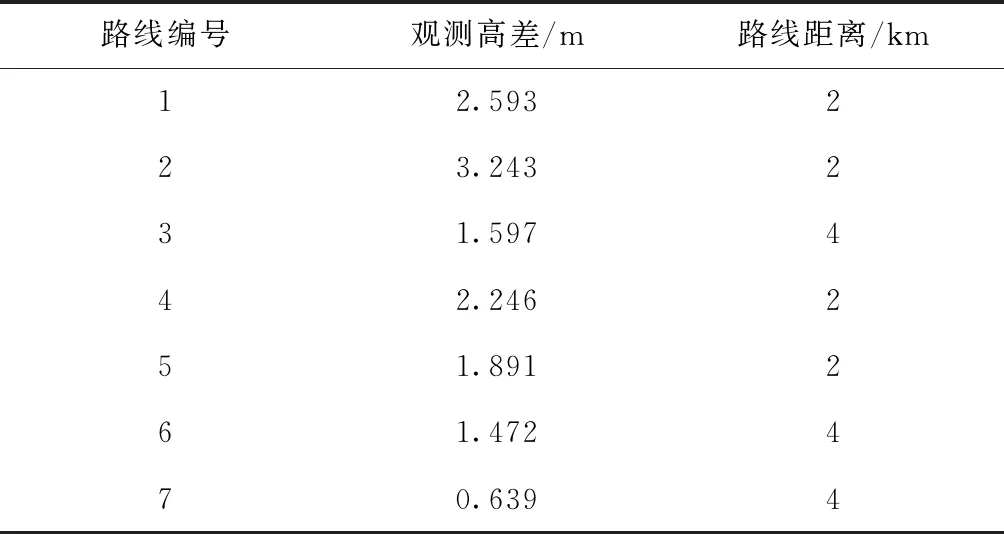
式中:V为n维观测误差向量,E(V)=0,D(V)=σ2P-1,B为误差方程的n×u设计矩阵,R(B)=t 利用条件极值的拉格朗日乘数法构建函数: φ=VTPV+2KT(CX-WX)=min . (3) 式中:K为对应于约束方程的联系数向量。为求φ的极小值,将其对x求偏导并令其等于零,则可以得到法方程: NX-W+CTK=0 . (4) 式中:N=BTPB,W=BTPL。N为u×u阶秩亏矩阵,R(N)=R(B)=t 联立式(2)和式(4),得到约束秩亏间接平差模型的总法方程为: (5) 式中:由于C为行满秩矩阵,且R(C)=s≥u-t,根据分块矩阵的性质[22],系数矩阵的凯利逆存在,解得: (6) 子块矩阵N的凯利逆不存在,因此,常规的分块矩阵的求逆式不能直接应用。 设 (7) 满足 (8) 则 NQ11+CTQ21=Iu, (9) (10) (11) CQ12=Is. (12) 将式(11)左乘CT后和式(9)相加,可得: (N+CTC)Q11+CTQ21=Iu. (13) 同理,将式(12)左乘CT再和式(10)相加,可得: (14) 可得: (15) 式中:由于C为行满秩且R(C)=s≥u-t,根据矩阵秩分解的性质[23],矩阵N+CTC,C(N+CTC)CT的凯利逆必存在,左边的四分块矩阵的凯利逆存在,可以直接应用常规的分块矩阵的求逆式,得到分块矩阵的逆矩阵为: (16) 分块矩阵 (17) 将式(17)带入式(6),可得: (18) 展开: (N+CTC)-1CT[C(N+CTC)CT]-1C(N+ CTC)-1}BTPL+(N+CTC)-1CT[C(N+ CTC)CT]-1WX, (19) 即为约束秩亏间接平差模型参数估计的一般显性表达式。 和约束间接平差模型的参数估计公式比较,约束秩亏间接平差模型的参数估计和其在形式上完全一致,只是秩亏的法方程系数N被N+CTC代替了。因此,将约束条件看做虚拟观测,和秩亏间接平差模型的误差方程组合新的误差方程: (20) (21) 设 (22) 可简化为: (23) 方程系数和常数项为: ΒTPΒ+CTC=N+CTC, (24) ΒTPL+CTWX=W+CTWX. (25) 新的误差方程和约束方程再构成约束间接平差模型,解算得: (26) 结果和约束秩亏间接平差模型的结果一致。因此,在约束秩亏间接平差模型解算时,将约束条件看做虚拟观测,和秩亏间接平差模型组合成新的误差方程之后,再和约束条件进行约束间接平差,其参数估计的结果不变。本文算法为约束秩亏间接平差模型的虚拟观测法。 为验证本文推导的求逆公式和虚拟观测算法的正确性,本文选取某水准网为例进行数值验证。如图1所示,点A,B为已知的高程点HA=6.250 m,HB=7.250 m,点P1,P2,P3为待求的高程点,已知数据与观测数据列于表1。 图1 水准网 表1 观测数据和已知数据 现分别用间接平差模型、约束秩亏间接平差模型的求逆公式法和虚拟观测法3种不同方法来解算待求点P1,P2,P3的高程。 方法一:用间接平差模型解算上述平差问题。考虑A,B为已知点,设P1,P2,P3点的高程为未知参数x3,x4,x5,将所有观测值的改正数表示成未知参数的误差方程: BX-L. (27) 按观测距离定义观测值的权,并令1 km的观测高差为单位权,则观测值的权阵为: P=diag[1/2.0 1/2.0 1/4.0 1/2.0 1/2.0 1/4.0 1/4.0]. (28) 根据最小二乘原理,解算得: (29) 方法二:用约束秩亏间接平差模型的求逆公式法解算上述平差问题。设A,B,P1,P2,P3点的高程为未知参数,将所有观测值的改正数表示成未知参数的误差方程: (30) 未知参数的系数矩阵为列秩亏矩阵。 A,B为已知点,组成约束方程: (31) 按观测距离定义观测值的权,并令1 km的观测高差为单位权,则观测值的协因数阵为: P=diag[1/2.0 1/2.0 1/4.0 1/2.0 1/2.0 1/4.0 1/4.0]. (32) 根据本文推导的约束秩亏间接平差模型的参数估计式(19)计算得: [x1x2x3x4x5]′= {(N+CTC)-1-(N+CTC)-1CT[C(N+ CTC)CT]-1C(N+CTC)-1}BTPL+ (N+CTC)-1CT[C(N+CTC)CT]-1WX= (33) x3,x4,x5为待求点的高程: 方法三:用约束秩亏间接平差模型的虚拟观测法解算上述平差问题。设A,B,P1,P2,P3点的高程为未知参数x1,x2,x3,x4,x5,在方法二中约束秩亏间接平差模型基础上,将约束方程看做虚拟观测,和秩亏间接平差模型组成新的误差方程: (34) 按观测距离定义观测值的权,并令1 km的观测高差为单位权,令已知点的权阵为单位权阵,则观测值和虚拟观测值的权阵为: P′=diag[1/2.0 1/2.0 1/4.0 1/2.0 1/2.0 1/4.0 1/4.0 1 1]. (35) 新误差方程和原约束方程根据约束间接平差模型的参数估计式,计算得: [x1x2x3x4x5]′= {(B′TP′B′)-1-(B′TP′B′)-1CT[C(B′TP′B′)-1× CT]-1C(B′TP′B′)-1}B′TP′L′+(B′TP′B′)-1CT× [C(B′TP′B′)-1CT]-1WX= (36) 从上述计算过程和结果可见: 1)约束秩亏间接平差模型的求逆式法、虚拟观测法和间接平差模型对未知点P1,P2,P3的参数估计[x3x4x5]的结果完全一样,证明本文推导的求逆公式和提出的虚拟观测算法是正确的。 2)间接平差模型为平差计算最常用的方法,其数学模型和计算比较简单,但是未区分平差系统的观测数据和基准数据两类不同性质的数据。约束秩亏间接平差模型区分了观测数据和基准数据,约束方程为平差系统提供参考基准,在研究观测值的内部符合精度、基准数据对参数的影响、基准数据的兼容性等方面具有明显优势。 3)虚拟观测法的约束方程作为误差方程加入到秩亏间接平差模型中,消除了秩亏间接平差模型的法方程系数矩阵的秩亏,从而将约束秩亏间接平差模型转换为约束间接平差模型,达到方便计算目的。 在解算约束秩亏间接平差模型时,对参数估计值进行修正和对秩亏间接平差模型的法方程系数进行修正的计算方法比较复杂,应用虚拟观测值算法为约束秩亏间接平差模型的算法提供了一条新的思路和方法。通过将约束条件看做虚拟观测,和原有的秩亏间接平差模型组合成新的误差方程,再和约束条件组成约束间接平差模型进行解算,从而在形式上消除了秩亏间接平差模型的法方程系数矩阵的秩亏,这样可以采用分块矩阵求凯利逆的方法求得参数估计。该方法和本文算法的计算结果是一样的,为解算约束秩亏间接平差模型的提供了一条简单精确的算法。
2 约束秩亏间接平差模型的虚拟观测法

3 案例与分析



4 结束语