基于HTCPN的装备维修仿真与资源需求确定
2021-05-13高颖杰曹继平杨阅兵许泽中
高颖杰,曹继平,杨阅兵,许泽中
(火箭军工程大学 作战保障学院,陕西 西安 710025)
随着我军信息化建设的推进,部队“高精尖”装备列装种类数量大幅提升,对装备保障提出了更高要求。维修保障资源的科学配置,能极大提升装备保障能力,而配置的前提是准确掌握装备对维修资源的需求,因此确定维修资源需求是提高资源配置水平的重要内容和主要影响因素。
目前,关于维修资源需求确定的研究区分宏观与微观两个方面。宏观上多采用基于数据统计和产品可靠性的方法进行预测,基于数据统计的常用方法有回归预测法[1]、时间序列法[2]、支持向量机(SVM)[3]等,基于产品可靠性的预测方法有相似产品法、案例推理法[4]等。另外还有人工神经网络[5]、灰色预测[6]等系统观点的方法。微观上的研究相对较少,主要针对装备指定故障确定维修资源,主要有传统的维修工作分析法(Maintenance Task Analysis,MTA)[7]、基于仿真的实体流图法、ARIS法和Petri网方法[8]等。
通过研究现状分析,发现存在几个问题:
1)宏观预测法适用于装备预防性维修所需资源的预测,但使用不同的方法对同一装备预测出的结果差别较大,可用于资源初始配置。对于修复性维修,宏观预测法就不适用了。
2)现代化战争更加注重保障的精准和高效,在高强度、高损耗的战场上,更加注重提高维修资源的使用率,结合具体的维修任务进行资源配置在战时能有效提高资源使用率,使资源配置更加精准。因此研究微观故障维修的资源需求具有重大意义。而当前相关研究还比较少,需要加强。
3)维修工作分析将装备的维修工作分解为作业步骤进行详细分析,从而确定各类维修保障资源种类数量,避免了因采用一般估计资源的臆测性和经验法所引起的资源浪费或短缺[9],但是需要分析每一项工作任务,过程会产生相当数量的文件表格,比较繁琐复杂,而且对于占用型资源的占用与释放过程不能很好体现。
针对以上问题,笔者对装备维修过程进行分析,运用Petri网理论和方法,提出层次时间颜色Petri网,并建立维修过程模型,运用基于JAVA环境下的PIPE软件对模型进行分析和仿真,直观展示资源占用、释放和消耗的过程,并提取所需维修资源。通过实例,验证方法的合理性和有效性。
1 HTCPN基本理论
层次时间颜色Petri网HTCPN(Hierarchical Timed Colored Petri Net,HTCPN),可定义为一个多元组[10-11]:
HTCPN={P,T;F,H,K,R,C,G,I},其中:
1)P={p1,p2,…,pm}是一个库所的有限集,表示对象的集合。
2)T是一个变迁的有限集:P∩T=∅,P∪T≠∅,其中Ti={t1,t2,…,tk}为瞬时变迁集合,Tt={tk+1,tk+2,…,tm}为延时变迁集合,Tc={tm+1,tm+2,…,tn}为子网的变迁集合;且有T=Ti∪Tt∪Tc,Ti∩Tt∩Tc=∅.
3)F⊆ (P×T)∪(T×P)是有向弧集,包括输入弧和输出弧线。
4)H为禁止弧的集合,H⊂(P×T),当与禁止弧相连的库所中托肯数量满足变迁激发条件时,禁止该变迁的激发。
5)K:P→N+∪{∞}为库所的容量函数,表示库所中容纳令牌的数目,N+={1,2,3,…}.
6)R是延时变迁的值,一旦变迁t被触发,变迁t的所有输入库所均要去除相应数量的令牌,并经过定义在变迁上的时间延迟R(t) 后,进入对应的输出库所。在实际系统中,部分时间延迟具有一定的随机性,因此规定可以是常量或随机变量。
7)C为颜色集合,不同颜色代表不同类托肯。
8)G为识别函数,为定义在T上的表达式,表示变迁触发需满足的条件。
9)I为初始化函数,为定义在P上的表达式,表示各库所初始令牌数量和颜色类别。
为了更形象地表达网的层次,特引入符号“可拓展变迁”[12-13]。HTCPN中的元素及其符号,以及代表的意义,如表1所示。
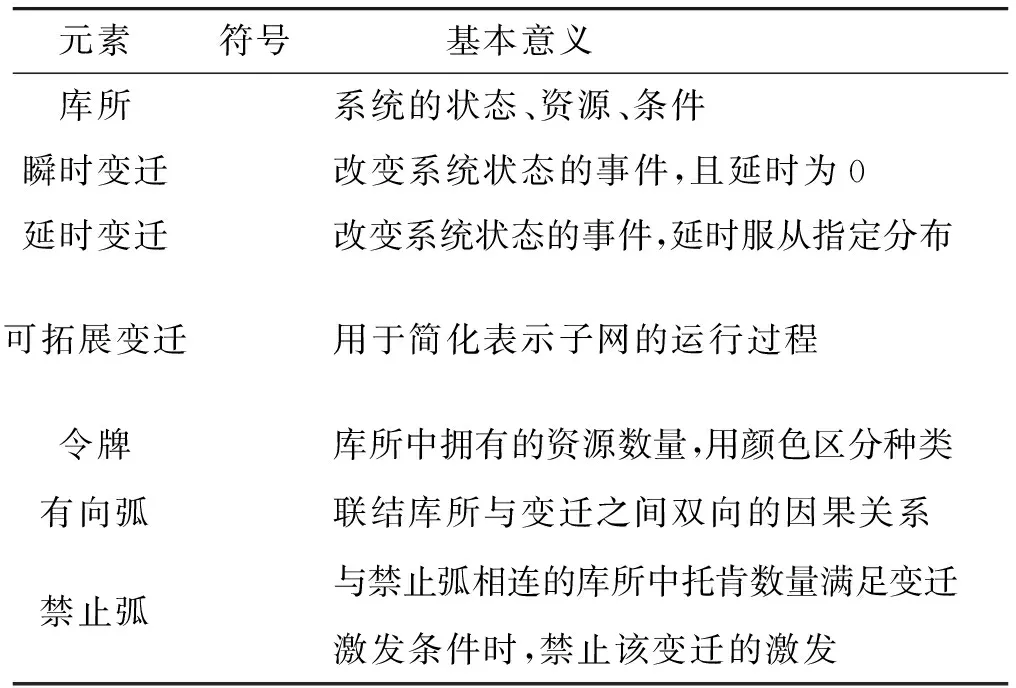
表1 HTCPN符号及意义说明
2 装备维修HTCPN建模
2.1 装备维修任务模型
2.1.1 装备维修任务介绍
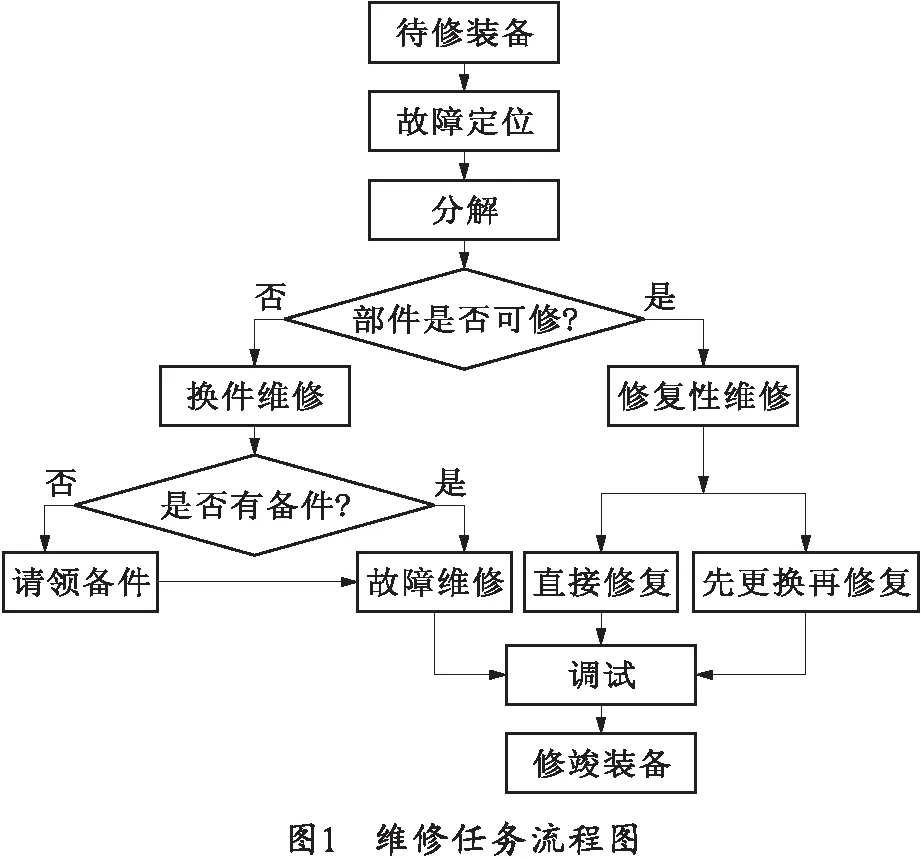
装备维修任务是按照装备故障维修策略,所进行的一系列活动的集合。例如,故障装备送至维修点,经过故障定位、分解、故障维修、组装调试等过程,输出修竣装备。根据故障部件是否可修,分为换件维修和修复性维修。换件维修是当备件充足时直接更换,若缺少备件需向上级请领,领回后再更换。修复性维修有两种方式供选择,一种是原件修复后装回;另一种是先安装备件,故障件修复后再作为备件储存起来。维修任务流程如图1所示。
2.1.2 装备维修任务HTCPN模型
基于装备维修任务抽象出的装备维修任务HTCPN模型,如图2所示。

图中库所及变迁的代号及含义如表2、3所示。
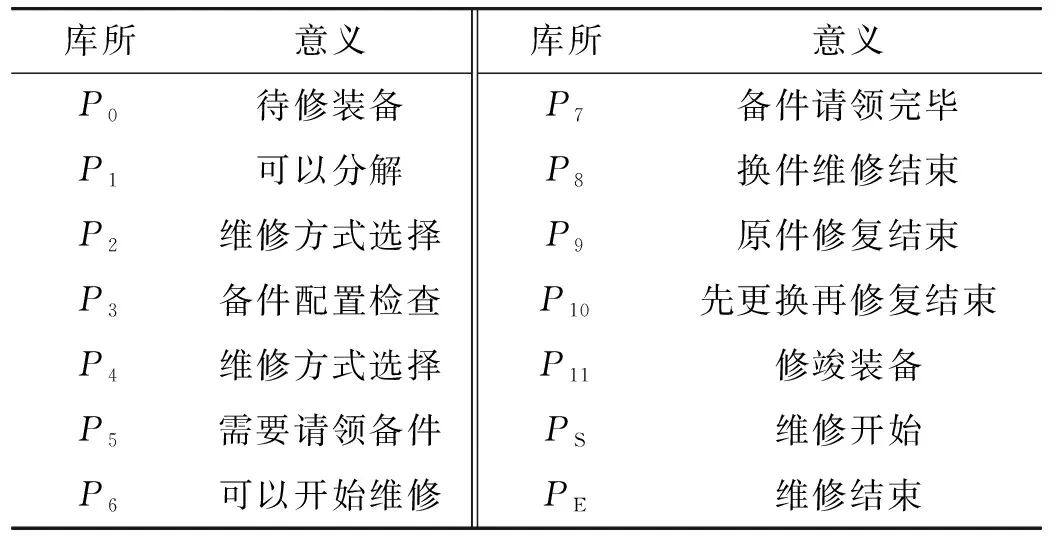
表2 库所的代号及意义说明

表3 变迁的代号及意义说明
图2(a)中可拓展变迁TM用来简化表示维修过程,可以进一步分解为维修过程子网来详细描述,如图2(b)所示,这也体现了HTCPN模型的层次性,降低了模型复杂度。在维修过程子网模型中,P3指向T3的禁止弧和P4指向T2的禁止弧,表达了维修方式的选择,若P3中有令牌代表进行换件维修,因此修复性维修T3被禁止。同理,P5指向T5的禁止弧和P6指向T4的禁止弧、P9指向T9的禁止弧和P10指向T8的禁止弧,也用来描述选择关系。
2.2 装备维修作业建模
2.2.1 PIPE软件简介
PIPE v4.3.0是一款基于JAVA环境下的Petri网仿真软件,该软件支持有色Petri网、随机Petri网的建模,库所可设置容量,连接弧权值可设置,变迁时间可用随机函数表示,同时具备模拟仿真功能,支持边修改边仿真,并能对Petri网模型进行分析,包括安全性分析、关联矩阵输出、响应时间分析等,是一款使用方便,功能强大的Petri网仿真分析软件。
2.2.2 基本维修操作模型
装备维修作业由若干个基本维修操作按照确定顺序组合而成,首先对维修基本操作进行建模与分析。建立一个基本维修操作模型,并使用PIPE软件模拟,如图3所示。
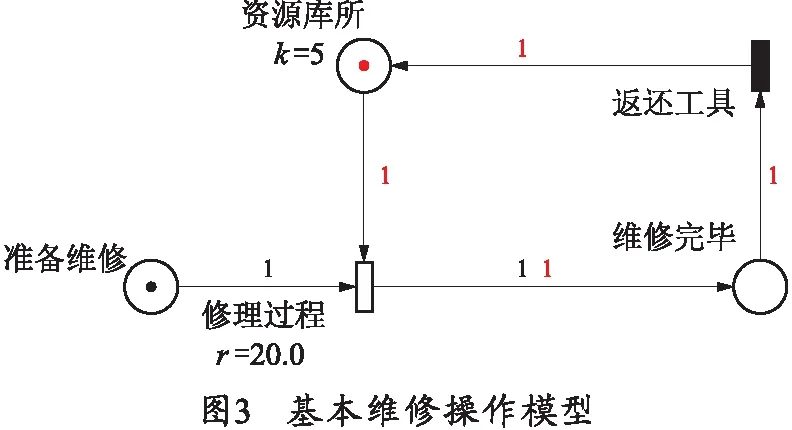
模型由3个库所、2个变迁以及若干有向弧组成,黑色和红色托肯分别表示修理工与工具。“维修过程”为延时变迁,r=20表示该变迁需要消耗20个单位时间,“返还工具”为瞬时变迁,用于表达工具使用完毕后由“占用”态转变为“空闲”态,返回“资源库所”。库所既可以表示装备的状态,也可以表示资源的集合,“资源库所”中k=5表示库所的最大容量为5,即最大存放5件工具。有向弧上的数字表示该弧的权值,例如“资源库所”至“修理过程”的有向弧权值为(红色1),代表资源库所向变迁提供1件工具。
使用PIPE软件对该模型进行分析,如图4所示。结果表明该模型有界、安全且不存在死锁,符合维修的实际情况。

使用PIPE软件对该模型进行仿真,如图5所示。
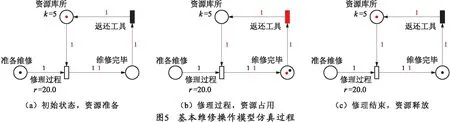
图5(a)为初始状态,“准备维修”和“资源库所”中存在令牌,且令牌数量满足有向弧权值要求,此时“修理过程”变迁使能(使能表示变迁激发的前提条件已经满足,此时变迁用红色凸显)。图5(b)为“修理过程”,变迁触发后经过20个单位时间,令牌转移至“修理完毕”库所,此时“返还工具”变迁使能。图5(c)为本阶段修理结束,修理工具返回“资源库所”,“修理工”令牌为下阶段维修操作开始做准备,模型运行结束不进行循环,符合维修实际。显然,该模型正常运行所需令牌的最小值,即该基本维修操作所需维修资源为1名工人和1件工具。
2.2.3 装备维修作业模型
装备维修作业是由若干个基本维修操作根据维修手册规定,按照一定顺序执行的基本维修操作序列。一个典型的装备维修作业模型如图6所示。

该模型表示一个基本的备件更换作业,首先拆下装备外壳,之后更换备件,最后安装外壳。模型中库所和变迁的代号及意义如表4所示。
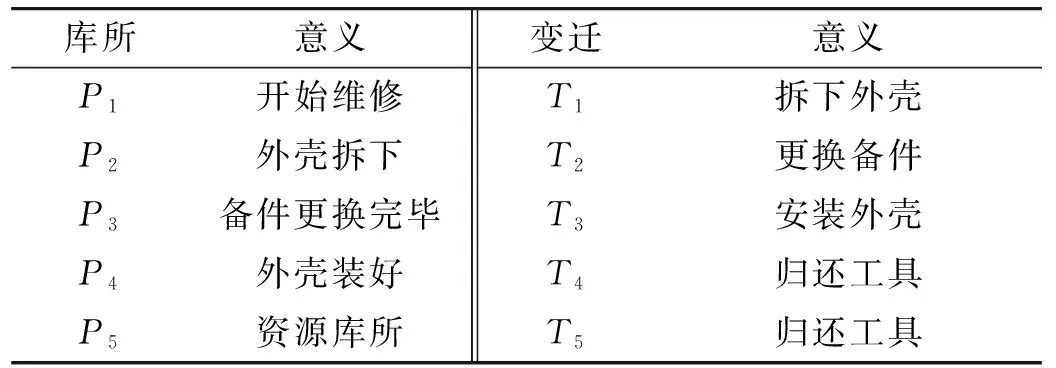
表4 库所、变迁代号及意义说明
模型中螺丝刀令牌为红色,备件令牌为蓝色,修理工令牌为黑色,由于修理工是每一个基本维修操作的执行者,属于维修资源的一种,但是为了降低模型复杂度,未将修理工纳入维修资源库所,而是将修理工作为启动令牌,认为在工具和备件准备就绪的前提下,修理工令牌到位后就可以执行基本维修操作。整个过程需要的维修资源为修理工1名、螺丝刀1把、消耗备件1个,其中螺丝刀使用了2次。模型中延时变迁的延迟时间代表基本维修操作消耗的时间,瞬时变迁表示资源使用后的释放。
综上所述,该方法的优点体现在:
1)直观展示了维修过程,详细刻画了维修步骤,确定了维修工序的紧前紧后关系,便于安排维修计划。
2)准确描述了维修资源状态,对维修过程中维修资源进行了分类和量化,对资源的的占用、释放和消耗状态进行描述,并明确了维修资源的需求。
3)细化了维修时间颗粒度,将维修工序过程化,赋予最小的过程时间属性,便于控制维修时间。
显然,运用该方法能够客观合理确定维修资源需求,便于控制维修过程,为复杂系统维修资源配置提供了一种辅助决策方法。
3 实例应用
以某自行发射装备液压系统为例,停机时发生活塞杆自行滑出故障的原因可能有3个:液压系统结构设计不合理;液压缸有缺陷,存在内部泄漏;双向液压锁不能有效锁止。笔者以液压缸内漏,需更换活塞Y型密封圈为例进行说明。对液压机构进行维修操作的流程如图7所示。

建立故障维修过程HTCPN模型,使用PIPE软件模拟,如图8所示。
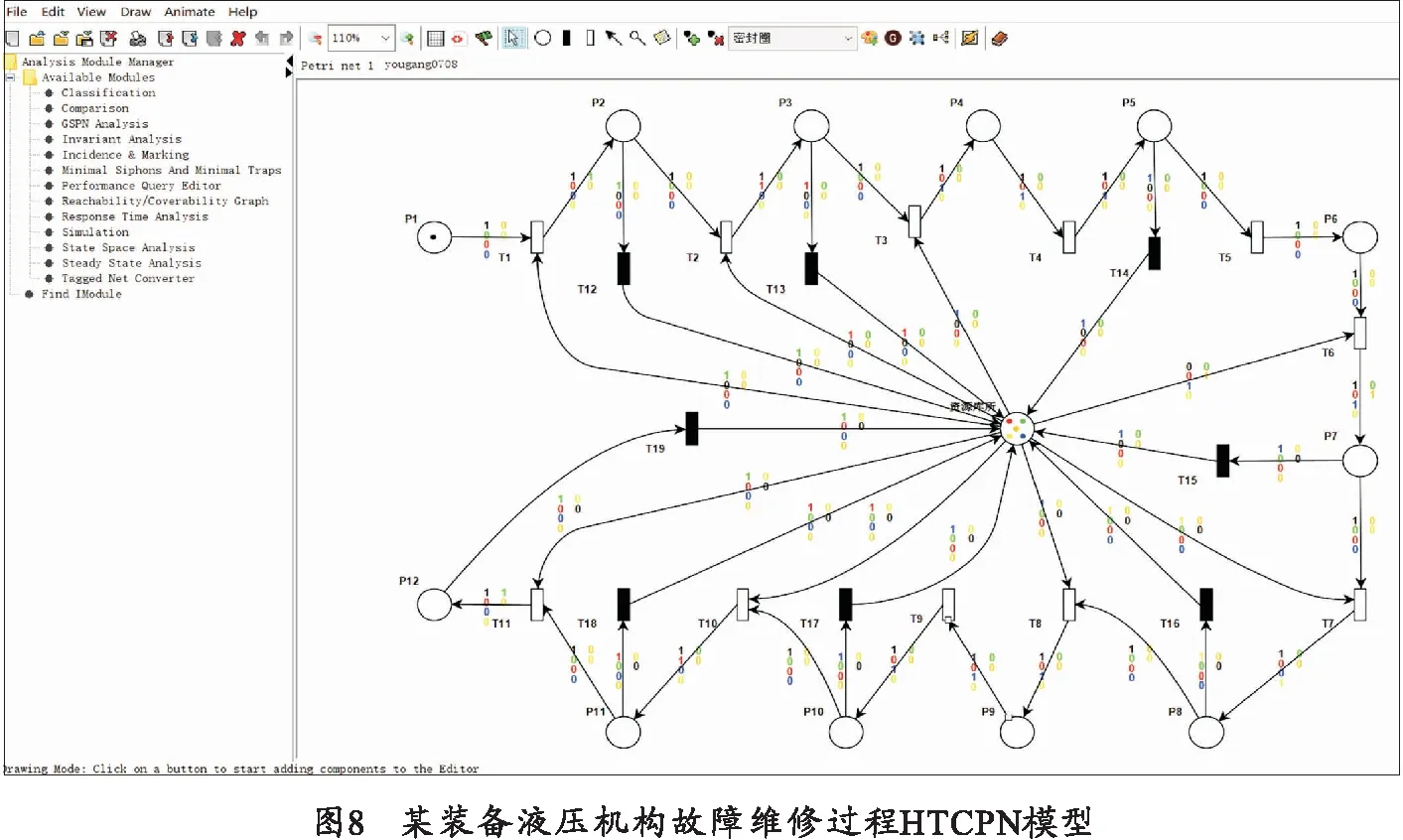
该模型由13个库所,11个延时变迁和8个瞬时变迁以及若干有向弧组成。使用PIPE软件对该模型进行分析,结果表明该模型有界、安全且不存在死锁,符合维修的实际情况。
模型中库所的代号及意义,如表5所示。
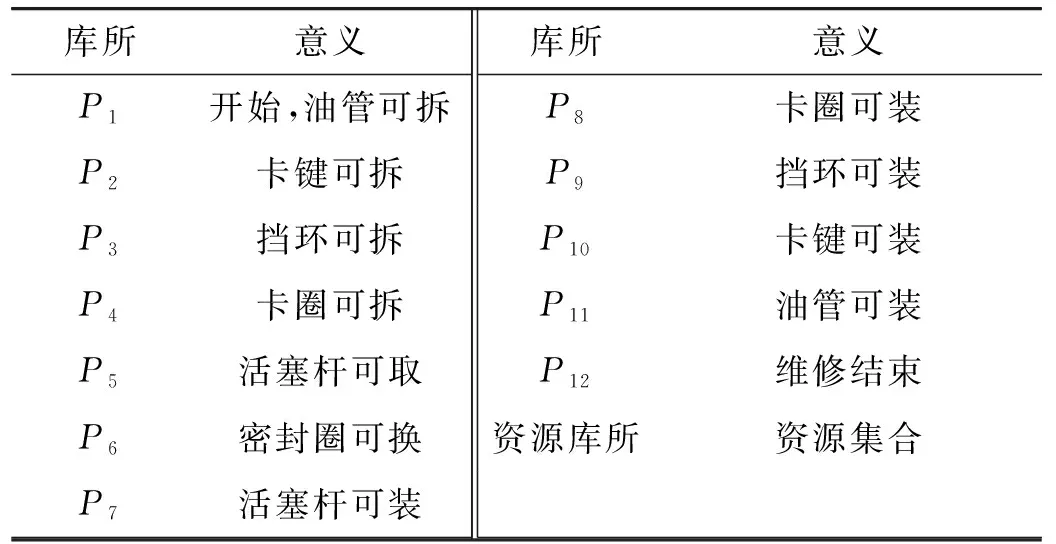
表5 库所代号及意义说明
模型中变迁的代号、意义、变迁触发的条件以及变迁的延时情况,如表6所示。表中T12~T19表达非消耗性资源释放返回资源库所。
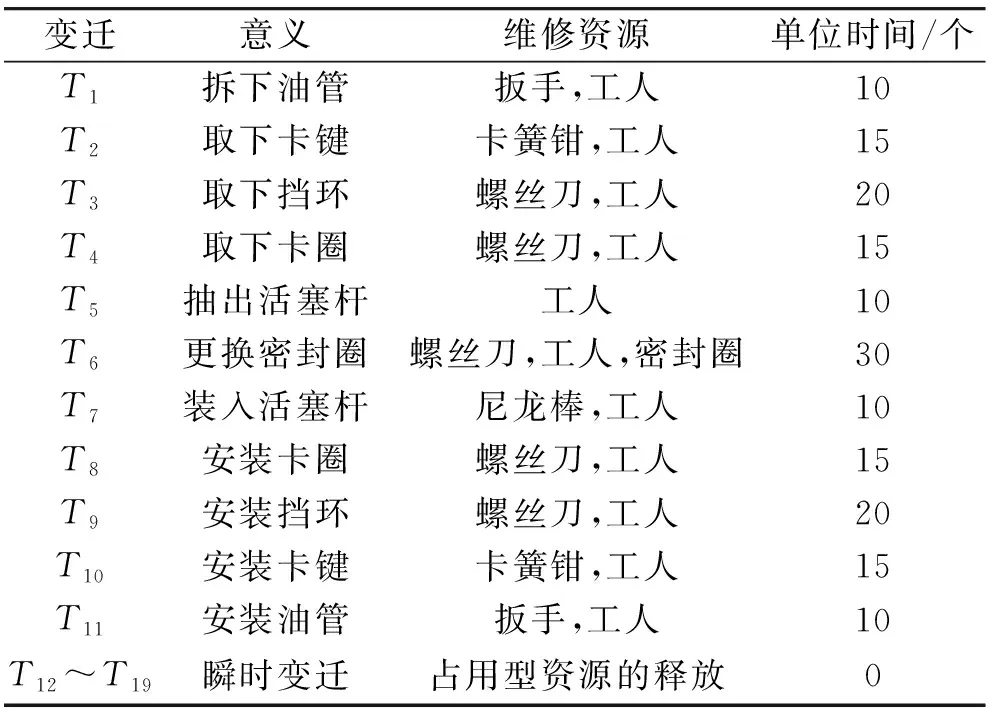
表6 变迁的代号与意义说明
模型中不同颜色令牌代表的维修资源种类情况,如表7所示。
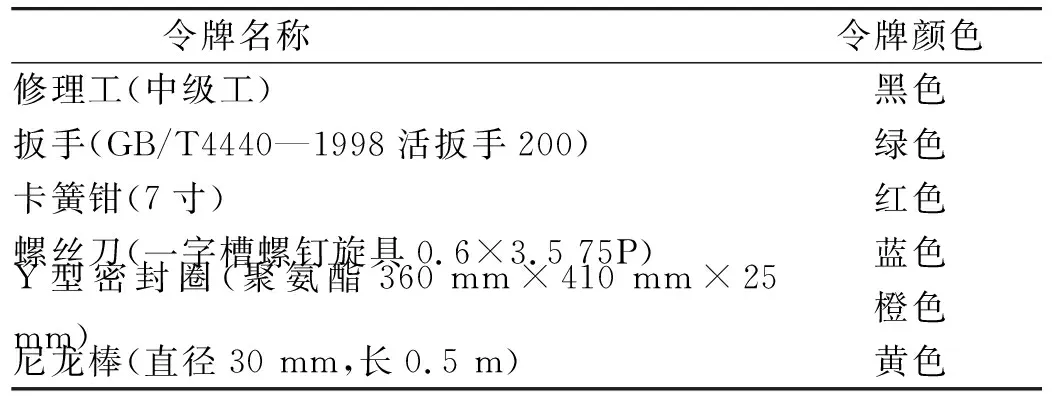
表7 令牌名称与颜色说明
使用PIPE软件对该模型进行仿真运行,模型运行结果如图9所示。
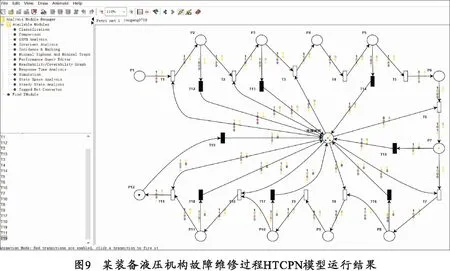
从图9中可以看出:
1)模型在维修工作结束后停止运行,表明维修过程中的各项操作只需执行1次,模型不存在循环,符合维修过程实际。
2)仿真结束后库所P7中留有1个橙色令牌,这表示更换密封圈的操作消耗了1个密封圈,该令牌属于消耗型资源,不再返回资源库所。
3)图9左下方列出了仿真过程中变迁触发的次序。
4)在不考虑时间延迟的情况下,对延时变迁的时间进行整合,可得出维修过程消耗的总时间。
5)维修过程所需维修资源为:工具(扳手、卡簧钳、螺丝刀、尼龙棒各1把),人员(维修工1名),消耗备件(Y型密封圈1个),耗费170个单位时间。
综上所述,该模型以修理工为启动令牌,能直观表示维修过程中维修资源的占用、空闲及消耗情况,运行稳定,符合实际。
文献[14]中采用使用与维修工作分析法确定导弹装备保障资源需求,文献[15]采用着色时间Petri网,通过构建关联矩阵,通过状态方程以及变迁触发条件,通过计算确定维修资源需求,但是这些方法都需要大量的计算,比较繁琐,不够直观。因此,笔者充分利用PIPE软件工具进行维修资源确定,步骤如下:
1)根据装备故障建立维修过程HTCPN模型,根据变迁触发条件,标出有向弧权值。此时资源库所为空。
2)统计资源库所全部输出弧代表的资源种类,找出各类资源权值最大的输出弧。实例中资源库所输出弧权值统计表8所示。
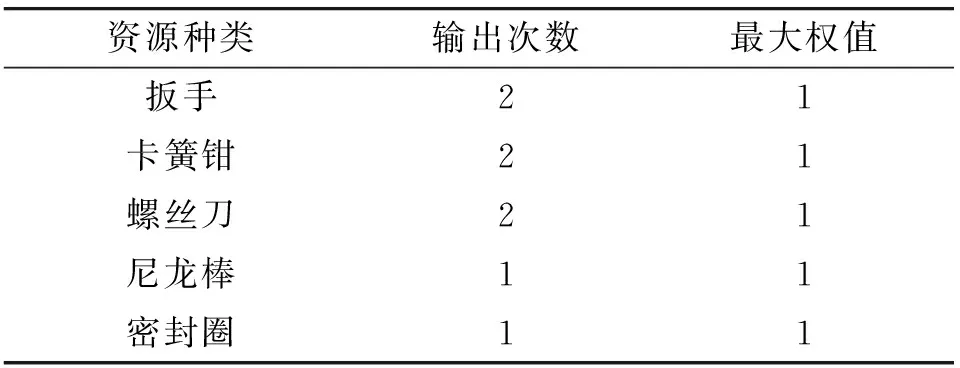
表8 资源库所输出弧权值统计
3)维修资源分为占用型资源(工具、人员)和消耗型资源。在HTCPN模型中,占用型资源采用直接观察法,即资源库所中该类占用型资源输出弧的最大权值就是该类资源最低需求数量。对于消耗型资源,则为叠加法,即将资源库所中该类消耗型资源所有输出弧权值相加,得出的值就是该类消耗型资源的最低需求数量。
4)将计算出的资源令牌颜色和数量添加到资源库所,运行模型仿真,验证资源需求的正确性。
4 结束语
基于HTCPN建立的维修工作模型直观展示了装备维修过程中对维修资源的占用、释放及消耗,为维修资源运用的可视化提供了可行的技术途径。HTCPN在处理复杂装备维修资源确定方面具有更大的优势,如果将时间、概率分布等情况作为变迁的约束条件,模型对装备维修过程的表达将更加丰富,对维修资源的配置优化水平提高和部队装备保障能力的提升有重要意义。