结合虚拟阻抗的分数阶PI-准比例谐振不平衡电压控制策略
2021-05-12程勇罗长青陈刘鑫
程勇,罗长青,陈刘鑫
(西安科技大学电气与控制工程学院,西安市 710054)
0 引 言
随着分布式发电技术快速发展,以下垂控制或虚拟同步电机控制的逆变器并联运行方式受到广泛关注,此类方法无需通信线,具有“即插即用”、友好、可靠的特性,是当前微网研究热点之一[1-2]。并网模式中,在大电网的支撑下,负载和线路阻抗不对称对系统的影响较小;离网模式中,不平衡负载产生的电流在系统阻抗上形成不平衡电压分量,造成系统电压质量下降。电能质量降低可能使负载设备运行不正常,使电力系统的稳定性和安全性受到威胁[3]。国家标准GB/T15543—2008《电能质量三相电压不平衡》要求,电力系统公共耦合点正常运行负序电压不平衡度不能超过2%,短时不得超4%[4]。目前应用较广的电压不平衡补偿装置有有源电力滤波器(active power filter,APF)、动态电压调节器(dynamic voltage regulator,DVR)等,但此类方案增加了建设成本,本文将从逆变器控制算法层寻求解决电压不平衡的方法。
针对三相三桥臂逆变器带不平衡负载,文献[5-6]利用对称分量法对逆变器输出电压进行正负序分离,分别在正序和负序旋转坐标系对正序和负序电压分量进行调节,通过补偿负序电压实现逆变器输出电压平衡。文献[7]在静止坐标系下采用复数滤波器提取电压正负序分量并采用复比例积分控制,结合虚拟复阻抗将负序阻抗控制为0,以此达到抑制负序电压的目的。电压分序控制算法可实现正序和负序电压独立控制,然而该算法需要对电压进行正负序分离,这一过程存在延时和精度下降等问题,此外分离算法和分序控制增大了程序的复杂度。文献[8-9]在同步旋转坐标下设计了比例积分(proportional integral,PI)控制与比例谐振(proportional resonant,PR)控制并联的电压控制器,根据PI与PR控制带宽的差异,PI控制平衡分量,PR控制不平衡分量。文献[10]为了降低逆变器输出的不平衡电压,采用PI控制与重复控制并联的复合控制策略。
本文提出一种结合虚拟阻抗的分数阶比例积分-准比例谐振(fractional order proportional integral-quasi proportional resonant,FOPI-QPR)控制策略,在dq旋转坐标系下,FOPI-QPR复合电压控制器用于控制基波正序和基波负序分量,负序虚拟阻抗用于补偿线路阻抗带来的负序电压分量,最终实现公共耦合点(point of common coupling,PCC)电压平衡。
1 不平衡下逆变器系统分析
离网逆变器系统结构如图1所示,直流侧为分布式发电输出的直流源,本文用直流电压源Udc代替。图中e为桥臂侧输出电压,Lf为滤波电感,Cf为滤波电容,if为电感电流,uf为LC滤波器输出侧电压,ip为线路传输电流,Zl为LC滤波器与公共连接点之间的线路阻抗,up为公共连接点电压,Zload为三相负载。三相逆变桥在脉冲宽度调制(pulse width modulation,PWM)控制下输出脉宽电压,经过LC滤波器衰减毛刺得到正弦波电压,最后经过线路阻抗并联到微网系统公共交流母线,为微网中的各种负载供电。
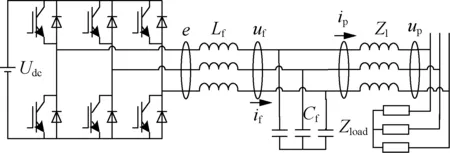
图1 离网逆变器系统结构
根据对称分量法,将三相信号分为正序、负序和零序分量。三相三桥臂逆变器拓扑无零序分量,则三相输出电压表示为[11-12]:

(1)
式中:ump为正序电压幅值;umn为负序电压幅值;φp为正序电压初相位;φn为负序电压初相位;ω为角频率。
对式(1)进行变换,得到dq坐标下电压分量为:
(2)
式(2)表明在dq坐标下,基波正序表现为直流分量,基波负序表现为二倍基频波动分量。因此根据正序和负序分量频率的差异,可设计相应频率的控制器实现正序和负序电压独立控制。
根据电能质量三相电压不平衡标准[4],三相不平衡度εUVF指标定义为:
(3)
式中:U+、U-分别为三相电压的正序、负序分量方均根值。
结合虚拟阻抗的复合电压双闭环解耦控制如图2所示,ufdref、ufqref分别为电压参考值的d轴、q轴分量,ufd、ufq分别为逆变器输出电压的d轴、q轴分量,ifdref、ifqref分别为电流参考值的d轴、q轴分量,ifd、ifq分别为电感电流的d轴、q轴分量,ipd、ipq分别为线路传输电流的d轴、q轴分量,电流控制器为比例(proportional,P)控制器,s为拉普拉斯算子,Rf为滤波电感等效电阻。
电压外环采用分数阶PI-准比例谐振控制,实现对正序、负序电压的无静差跟踪控制,其指令电压ufref包含基波正序和负序虚拟阻抗电压分量。电流内环采用比例控制器,可提高电压暂态响应,抑制负荷变化对输出电压造成的影响[12-13]。
根据图2得到逆变器输出的电压为:

图2 电压双闭环控制框图
uc=G(s)uref-Zo(s)if
(4)
式中:G(s)为电压环传递函数;uref为基准电压参考值;Zo(s)为等效输出阻抗。G(s)和Zo(s)分别表示为:
(5)
式中:Gv(s)为电压控制器传递函数;Gc(s)为电流控制器传递函数。
在式(4)的基础上,可以得到PCC电压的正序和负序分量为:
(6)
式中:上标“+”、“-”分别表示正序分量和负序分量;up为PCC电压;Zv为虚拟阻抗。
根据式(6),PCC电压包含两部分:一部分为控制器跟踪的指令值,包括基准电压和虚拟阻抗算法电压;另一部分为电流在阻抗上的电压降落,其中阻抗包括等效输出阻抗和线路阻抗。为了减小PCC负序电压,首先是提高G(s)对指令信号的跟随性,满足G(s)=1,Zo(s)=0,同时还要减小基波负序总阻抗。
2 复合电压控制器
为了实现逆变器对电压正序和负序分量的独立跟踪控制,本文在dq坐标系下设计了一种复合电压控制器。根据内模理论,如果要使一个反馈控制系统的输出能无静差地跟踪指令信号,控制器的传递函数必须包含与参考信号相对应的数学模型[14]。直流量的拉氏变换为1/s,针对正序分量可采用PI控制器[15],PI控制器的传递函数GPI(s)为:
(7)
式中:Kp为比例系数;Ki为积分系数。
PI控制器可实现正序分量无静差控制,满足G+(s)=1,Zo+(s)=0。然而PI控制器不能实现对负序分量无静差跟踪,对负序分量可采用比例谐振控制器,比例谐振控制器的传递函数GPR(s)为:
(8)
式中:Kr为谐振项系数;ω0为谐振频率。
综上,在旋转dq坐标下,PI控制基波正序分量,PR控制基波负序分量,两者并联结构的复合电压控制器可以实现正负序电压独立无静差控制。
考虑到整数阶PI控制积分阶次为1,可能不适应于被控对象,难以获得理想的控制性能。而分数阶PI控制中的积分阶次取值灵活,可通过调整相角滞后来适应被控系统,从而提高系统动态和稳态性能[16-18]。FOPI控制器的传递函数GFOPI(s)为:
(9)
式中:λ为积分阶次系数。
分数阶积分无法直接实现,可采用Oustaloup近似化方法,在最小拟合频率ωb与最大拟合频率ωh之间,当0<λ<1,sλ表示为[19]:
(10)
其中,极点ωk,零点ω′k和增益K取值分别为:
(11)
式中:k为滤波器阶次;2N+1为总滤波器阶次,本文设计中N取2,ωb取1×10-5,ωh取1×105。
在FOPI控制器的实现中,应用式(10)对其进行近似化处理可得到FOPI控制器的传递函数,采用Tustin离散化方法可到FOPI数字控制器。
由于谐振控制在非基频处增益非常小,当基频发生偏移时,控制效果变差。为保证一定的控制带宽,当控制频率发生偏移时也能保持良好的控制效果,应用QPR控制,其传递函数GQPR(s)为:
(12)
式中:ωc为剪切频率。
令s=jω,根据控制器带宽的计算方法,得到如下不等式:
(13)
该不等式的两个解ω1和ω1满足:
(14)
式(14)表明QPR控制器带宽为ωc/π,当允许频率波动为±0.5 Hz时,ωc可取为2π。当控制信号的频率为谐振频率ω0时,s=jω0,增益为(Kp+Kr),当控制信号的频率远离谐振频率,QPR逐渐降低为比例控制,相位的超前滞后也逐渐下降。
FOPI与QPR采用并联结构,其比例系数是共有的。取基波频率为50 Hz,分数阶PI参数Kp=0.4,Ki=60,λ=0.9,QPR控制参数Kr=10,ωc=2π,ω0=100π。控制器参数通过优化算法迭代,并结合实验效果调整确定。将控制参数代入到式(9)和式(12)绘制FOPI和QPR的波特图如图3所示。

图3 FOPI与QPR波特图
从图3可以看出,FOPI在基波正序频率0 rad/s处增益为50 dB以上,QPR在基波负序频率100 π rad/s处益增为20 dB,因而能在dq轴下实现对基波正序和基波负序分量的无静差跟踪。
3 分序虚拟阻抗
针对不平衡电流在线路阻抗产生的不平衡压降,采用负序虚拟阻抗的方法调整负序阻抗,从而抑制PCC不平衡电压。虚拟阻抗的实现原理是根据线路传输电流与虚拟阻抗值计算虚拟阻抗压降,叠加在基准电压上改变输出电压,间接改变系统阻抗[20-21]。两相静止坐标下,分序虚拟阻抗压降计算实现方式如图4所示,Rv和Lv为虚拟电阻和虚拟电感,ipα、ipβ为两相静止坐标下的线路传输电流,uvα、uvβ为两相静止坐标下虚拟阻抗产生的电压降。

图4 分序虚拟阻抗实现框图
分序虚拟阻抗首先要提取线路电流基波正序和负序分量,一般可采用陷波器、旋转坐标等方法。正序虚拟阻抗在并联逆变器中可以提高功率解耦的程度和功率均分的精度,而负序虚拟阻抗可减小系统负序阻抗,抑制PCC不平衡电压。综合以上,得到逆变器控制系统结构如图5所示,ipabc为三相线路传输电流,iαβ-为线路传输电流的负序分量,uvαβ-为负序虚拟阻抗产生的电压降。

图5 逆变器控制系统结构
4 仿真分析
根据表1参数,搭建Matlab/Simulink单台逆变器仿真模型,采用固定步长模式discrete解法器,通过Tsutin方法实现离散化,在平衡负载和不平衡负载工况下对所设计算法进行验证。
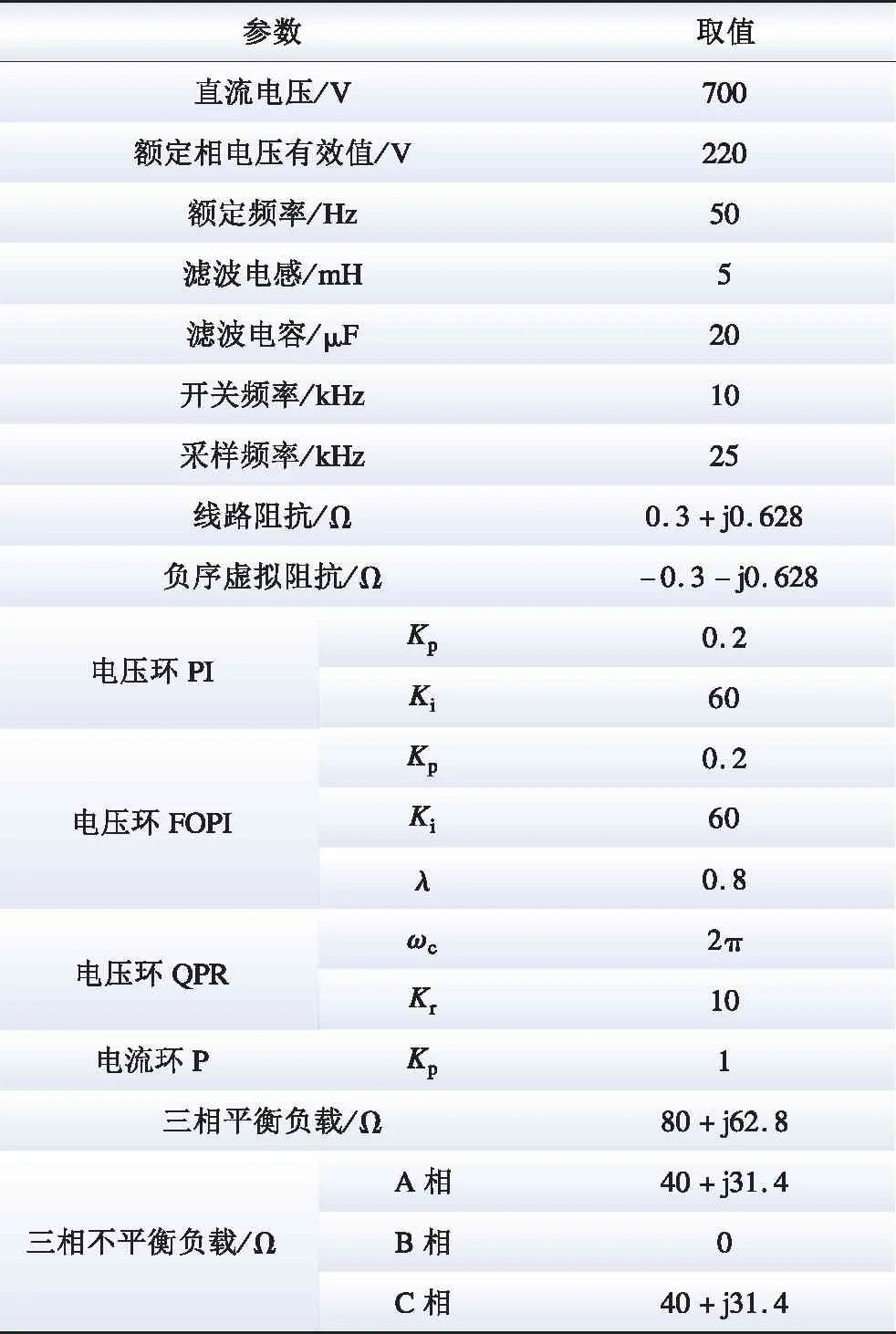
表1 仿真参数
仿真1:0~0.02 s中,负载条件为一组三相平衡负载,t=0.02 s投入一组相同的平衡负载,得到PI与FOPI控制在LC输出侧三相电压幅值响应如图6所示。
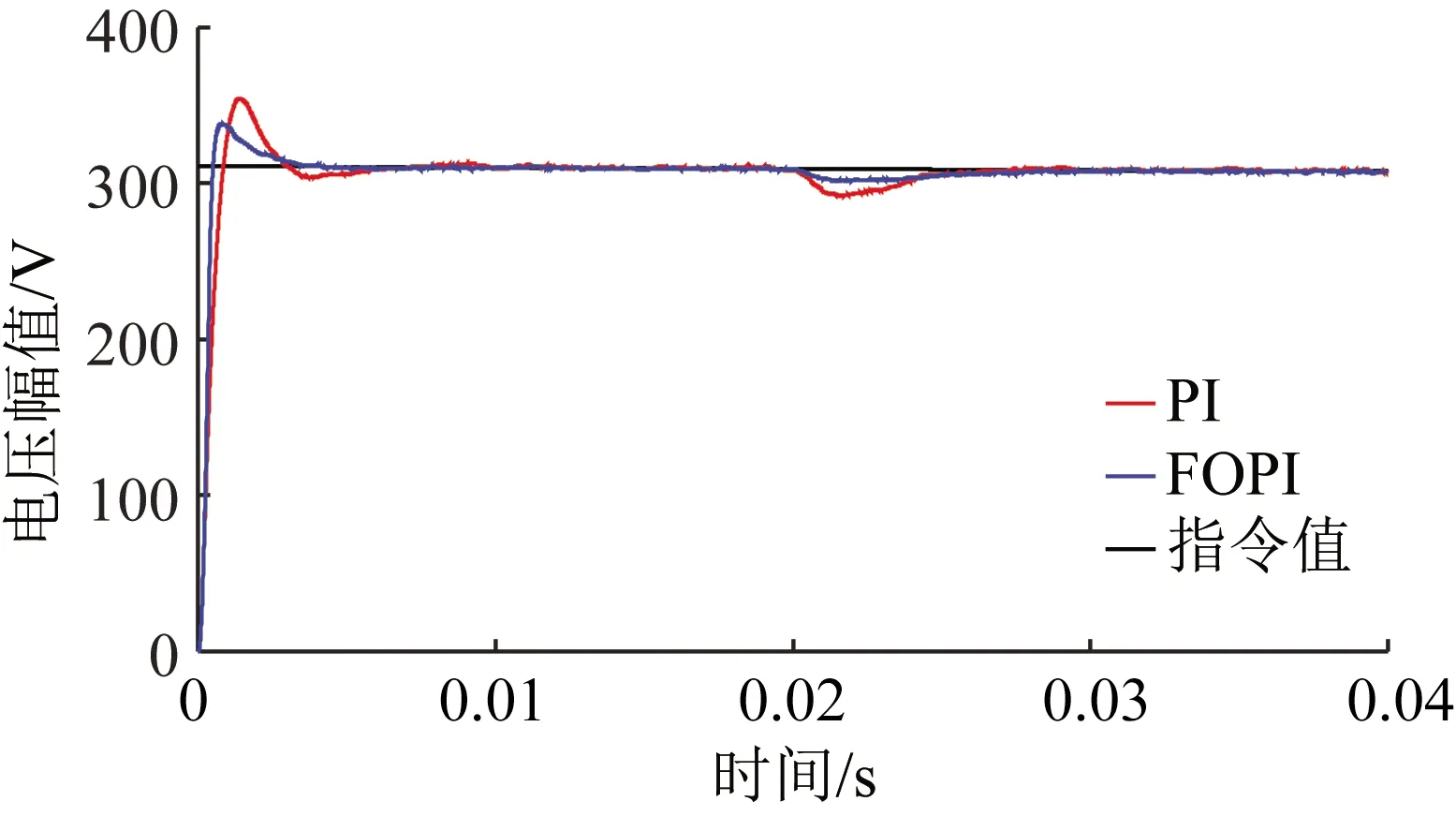
图6 仿真1输出电压响应
根据图6,平衡负载下FOPI控制器超调量、稳定时间均小于传统PI控制器,且FOPI控制在加负载下电压响应速度快。
仿真2:负载为一组平衡负载并联一组不平衡负载。0~0.2 s中,逆变器仅采用FOPI控制,t=0.2 s加入QPR控制,t=0.4 s再加入负序虚拟阻抗,得到LC侧电压Vcap和PCC侧电压Vp幅值如图7所示,LC侧电压Vcap和PCC侧电压Vp不平衡度如图8所示。
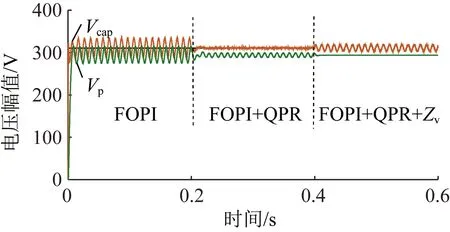
图7 仿真2输出电压响应
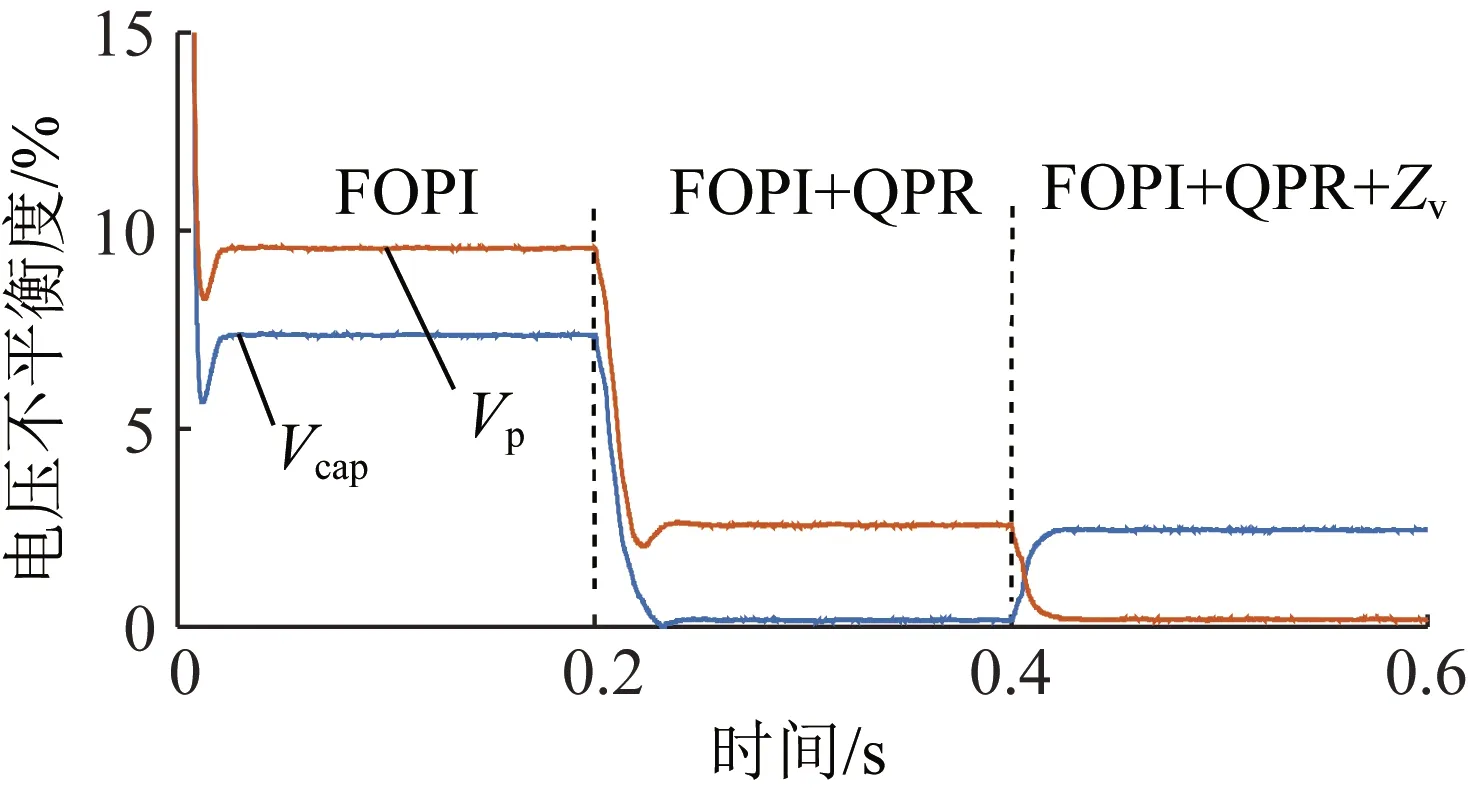
图8 仿真2输出电压不平衡度
根据图7,逆变器在不平衡负载工况下输出的三相电压不平衡,其幅值包含直流的平衡分量和二倍波动的不平衡分量。结合图8,FOPI控制下,LC输出侧电压不平衡度为7.36%,PCC电压不平衡度为9.55%;t=0.2 s,在FOPI-QPR控制下,LC输出侧电压不平衡度为0.17%,PCC电压不平衡度为2.55%;t=0.4 s,引入负序虚拟阻抗后,LC输出电压由于包含了负序虚拟压降,不平衡度增至2.21%,PCC电压不平衡度降为0.20%。至此,以抑制PCC不平衡电压为目标的结合虚拟阻抗的分数阶PI-准比例谐振电压控制策略的有效性得到了仿真验证。
5 实验结果
搭建的单台逆变器实验硬件如图9所示,其中线路阻抗用电感和绕线电阻模拟。主要实验参数如表2所示。

表2 实验参数

图9 实验硬件
在不同负载、不同控制方法的实验条件下得到逆变器在LC输出三相电压波形,图10为FOPI控制下平衡负载中投入不平衡负载的输出三相电压波形变化,图11为引入QPR控制器的输出三相电压波形变化,图12为引入负序虚拟阻抗的输出三相电压波形变化。
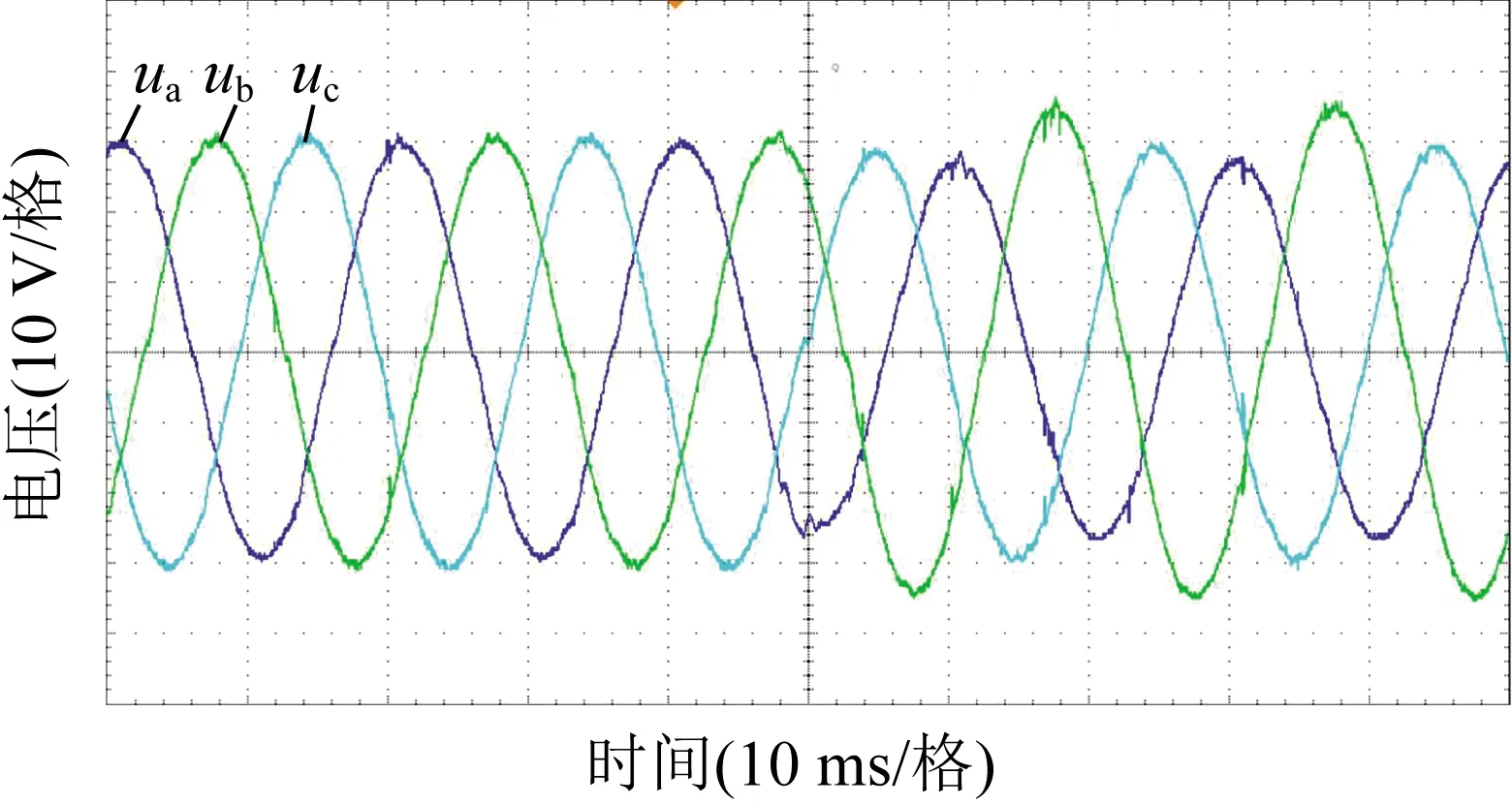
图10 平衡负载投入不平衡负载的输出三相电压波形
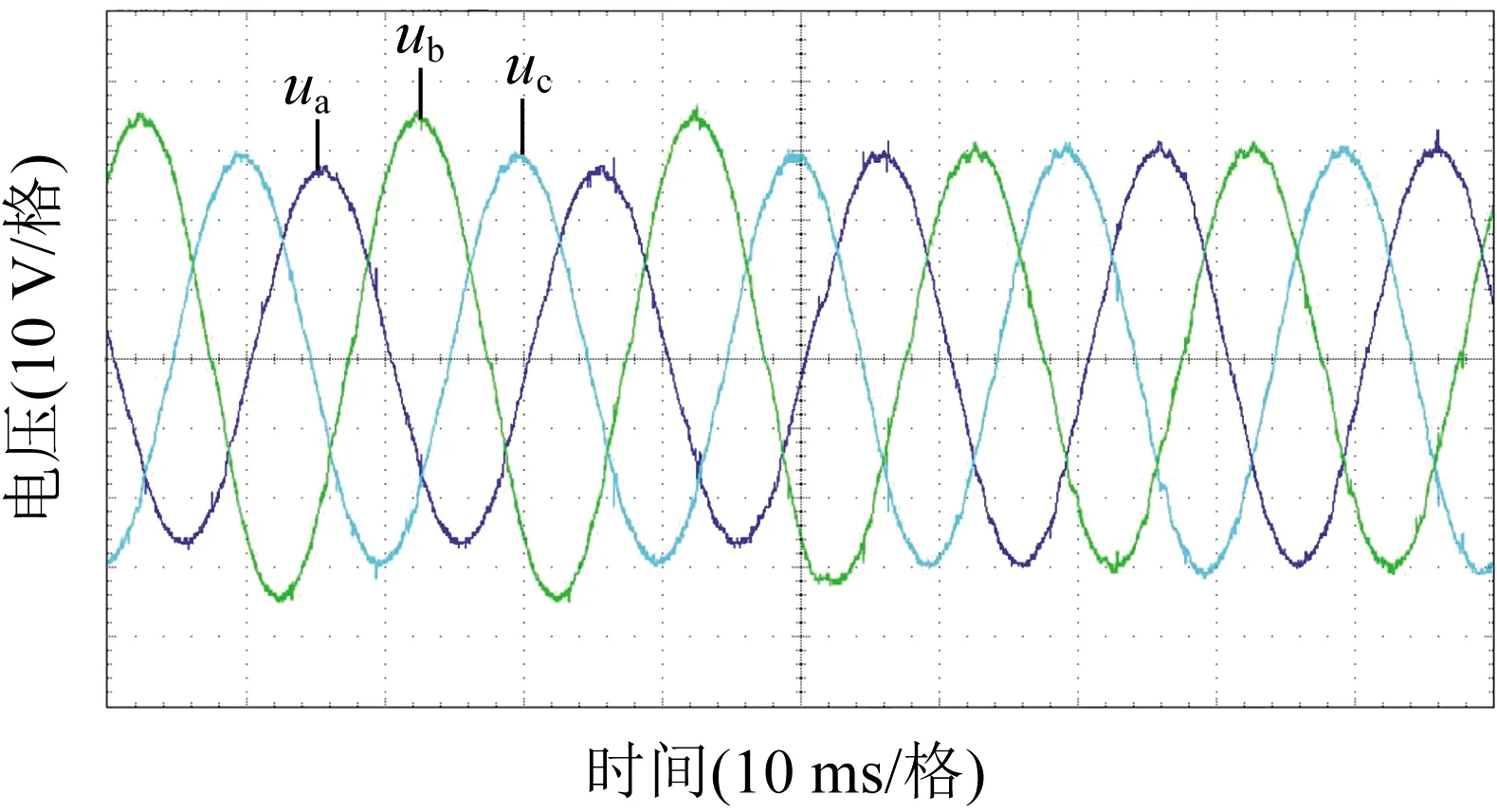
图11 引入QPR控制器的输出三相电压波形

图12 引入负序虚拟阻抗的输出三相电压波形
图13为FOPI控制逆变器带平衡负载、投入不平衡负载、引入QPR控制器、引入负序虚拟阻抗4个稳态下LC和PCC三相电压幅值,该曲线的4个稳态电压幅值仅为稳态数据拼接,不包含暂态变化过程。表3为4个稳态下,LC和PCC三相电压不平衡度。
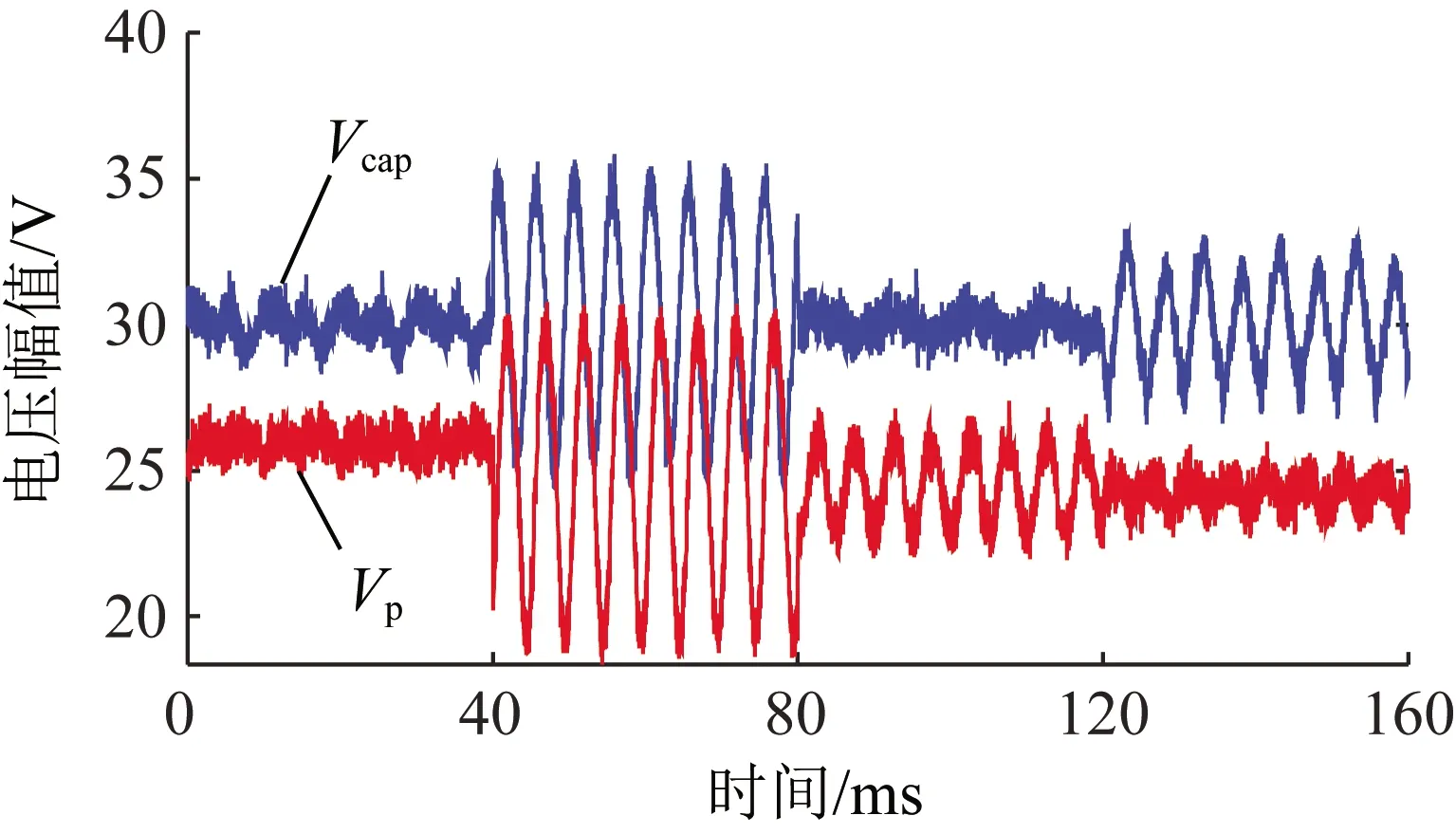
图13 不同工况下三相电压幅值

表3 不同工况下电压不平衡度
最后在不平衡负载工况下,得到结合虚拟阻抗的分数阶PI-准比例谐振控制下PCC三相电压电流波形如图14所示。
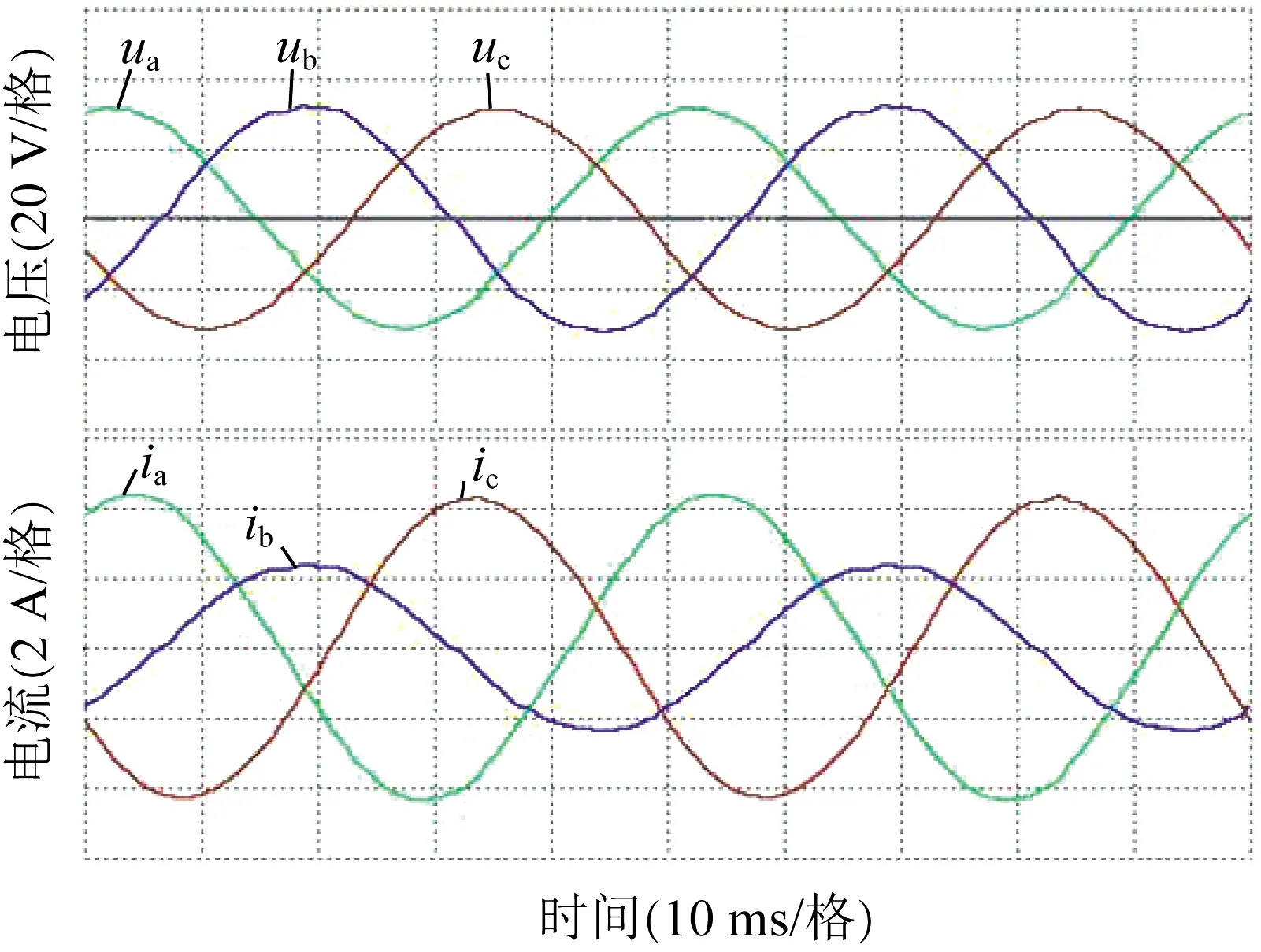
图14 PCC侧三相电压电流波形
根据以上实验结果可知,不平衡负载工况下PCC电压不平衡度降为1.2%,满足电能质量标准,验证了所设计方法的有效性。
6 结 论
本文首先分析了离网逆变器带不平衡负载的特性以及PCC三相电压不平衡抑制原理,然后提出结合虚拟阻抗的FOPI-QPR电压控制策略。在不需要分离电压正负序分量的前提下,FOPI-QPR复合电压控制器可以实现双序电压独立控制,同时设计负序虚拟阻抗补偿线路阻抗不平衡电压降落。在不平衡负载实验中,采用本文所提方法PCC电压不平衡度由22.1%降至1.2%,有效抑制了PCC不平衡电压,提高了负载供电质量。实际微网逆变器电源通常以并联模式运行,电压不平衡问题对并联逆变器系统稳定性的影响更为严重,下一步可在并联逆变器中试验分序虚拟阻抗和复合电压控制器的作用。
