模糊控制系统在网络控制系统中的应用
2021-05-12广东理工学院宫占霞
广东理工学院 宫占霞
随着科技的发展与进步,传统点对点形式的控制系统已经满足不了现在的技术需求,网络控制系统虽然弥补了传统控制系统的缺点,但是针对无法确定数学模型的控制系统,受到了一定的限制。在无法确定控制系统模型的情况下,模糊控制可以起到良好的控制效果。
伴随着科学技术的发展,人口的增加,导致人们的物质需求和精神需求逐渐提高,需求量也大大增加,为了提高生产规模,加大监控力度,控制系统也在逐渐发展当中。
传统控制系统的特点:信息点对点的传输方式,适用于所需控制器件不多,占用空间面积不大的场合,具有布线成本低、维护性高、扩展性好等优点。
网络控制系统的特点:通过网络平台共享信息、传输信息,兼有模块化设计,解决了复杂控制系统使用传统控制系统布线成本高、占用空间面积大等问题。
但是,由于网络的介入,在网络控制系统中,数据包丢失、时间延迟、噪声干扰等不确定性因素的存在,通常会致使系统在运行过程中不稳定。最优控制器是针对时间延迟的问题所设计的,最优控制器的效果很好,但是此种控制器需要在被控对象的数学模型完全确定的情况下才能够处理时间延迟所引起的控制系统的不稳定现象。然而,当控制系统属于分布式事件系统时,因其系统的分布性与不确定性,导致无法用精确的数学控制模型描述控制系统,因此导致最优控制器的使用受到了约束。日前,智能控制理论映着科技的进步而发展起来,为网络控制系统无法确定数学模型这一问题提供了解决办法。
模糊系统是使用模糊规则进行推理和决策的,运用科学知识,结合专家的控制经验,在难以使用精确数学控制模型的条件下描述被控对象,并得到很好的控制效果,具有类似人类思维与决策的作用。
1 模糊控制系统结构
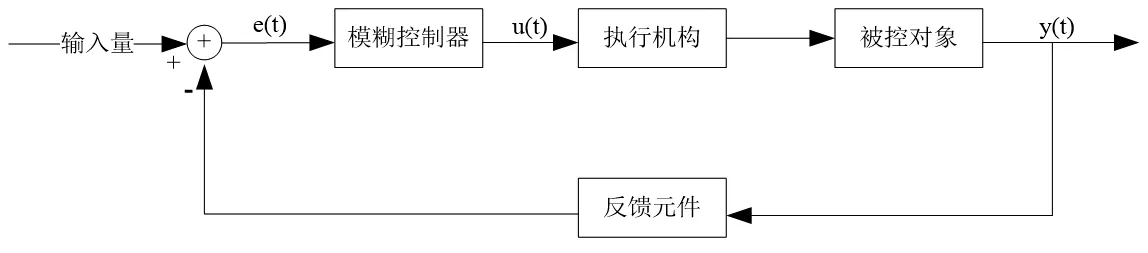
图1 模糊控制系统结构图

图2 一维模糊控制器框图

图3 二维模糊控制器框图
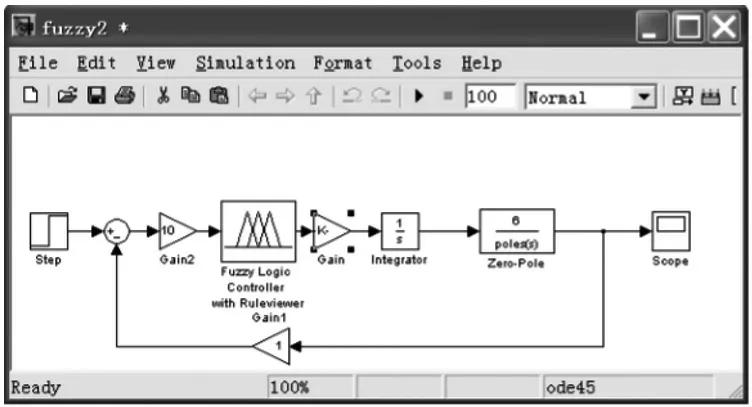
图4 一维模糊控制系统仿真图

图5 一维模糊控制系统响应曲线
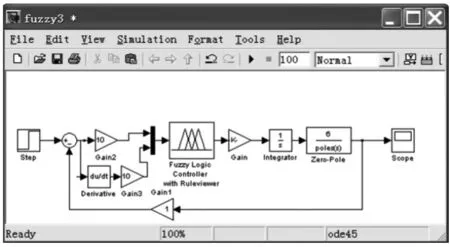
图6 二维模糊控制系统仿真图
图1所示为模糊控制系统的结构示意图。模糊控制系统由被控对象、模糊控制器、执行机构以及反馈元件所组成。与传统的控制系统不同之处在于原来的控制器被模糊控制器所替代。
由模糊控制系统构成的控制器称为模糊控制器。按照信号处理方式的不同,模糊控制器分为一维和二维模糊控制器。图2和图3所示为模糊控制器的一维和二维结构框图。
2 模糊控制器应用举例
假设被控对象的数学模型为:

控制系统的模型未知,反馈元件传递函数为H(s)=1。现对该被控对象设计一维和二维的模糊控制器,并对控制器进行仿真,将一维和二维控制器进行对比。
(1)一维控制器设计(图2)
(2)二维控制器设计(图3)
建立图4所示一维模糊控制系统的仿真模型,并给定相应模糊论域和实际论域,以及模糊规则,得到图5所示一维模糊控制系统相应曲线的仿真结果。
建立图6所示二维模糊控制系统的仿真模型,并给定相应模糊论域和实际论域,以及模糊规则,得到图7所示二维模糊控制系统相应曲线的仿真结果。
结论:由以上一维模糊控制系统和二维模糊控制系统响应曲线可知,二维系统由于引入了偏差的变化率,使得阶跃响应的超调量变小了,但是响应的速度变慢了。并且验证了,在没有确切数学模型的基础上,可以使用模糊控制规则来稳定控制系统。