小儿机器人肾盂成形术的经验初探
2021-05-12陈鲁秋崔新海陈嘉伟李国伟孙丰银
陈鲁秋,崔新海,陈嘉伟,李国伟,孙丰银,2
(1.山东大学齐鲁医院小儿外科,山东 济南,250012;2.山东齐都药业有限公司)
肾盂积水是小儿泌尿外科常见的先天性疾病,主要由肾盂输尿管连接部梗阻(ureteropelvic junction obstruction,UPJO)导致,其发病率为0.06~0.16%[1-2]。目前腹腔镜小儿离断式肾盂成形术已被大家广泛接受,并成为治疗UPJO的主流术式[3-6]。自2002年第一例机器人肾盂成形术报道以来,近十年小儿机器人肾盂成形术已成为应用达芬奇机器人技术最多的小儿外科手术[7]。达芬奇机器人技术自2020年山东大学齐鲁医院引入后,在小儿外科逐渐开展与使用,2020年8~9月本治疗组共施行3例小儿机器人腹腔镜肾盂成形术,现总结经验如下。
1 资料与方法
1.1 临床资料 本组3例患儿均为男性,年龄分别为4.5岁、7.2岁、5.8岁。临床表现:第1例患儿系孕检发现左肾积水,出生后B超随访积水进行性加重,磁共振泌尿系水成像提示左肾实质变薄,肾盂肾盏明显扩张,肾盂前后径3.2 cm,考虑UPJO;第2例系因腹痛行B超检查,发现左肾重度积水,磁共振泌尿系水成像提示左肾盂肾盏扩张,肾盂前后径2.7 cm,扩张下缘局部管腔狭窄迂曲;第3例因哭闹不适行B超检查,发现左肾积水,磁共振泌尿系水成像提示左肾盂肾盏增宽,肾盂前后径2.2 cm,左肾重度积水。
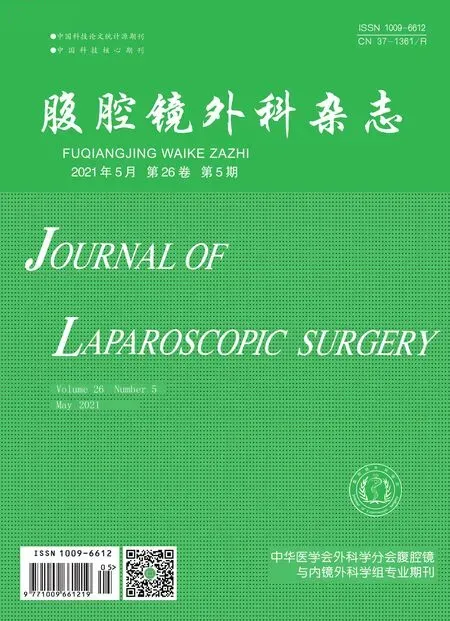
1.2 手术方法 达芬奇手术系统有三个主要部分:(1)机械手臂外科车;(2)视频影像系统(包括腹腔镜显示屏、摄像头、光源);(3)手术操控台。机械手臂外科车:包括3枚器械臂与1枚镜头臂,通过适配器连接达芬奇手术器械。视频影像系统:摄像头有两个内置镜头,分别采集左、右两个图像,整合后可为术者提供3D视野,但助手仅可通过显示屏获得2D视野。操控台:由红外线感应控制,头部置入目视区可激活系统,离开便取消激活,并锁定机械手臂;术者通过手指控制器直接控制机械臂所连接手术器械运动;脚踏控制摄像头位置与电凝;立体目镜可提供放大10~15倍的3D手术视野。常用手术器械包括Maryland双极钳、有孔双极钳、弯剪刀、持针器;器械使用寿命为10次;与传统器械不同,手术器械末端增加“类腕”关节化运动,内置震颤过滤功能。手术体位:同传统腹腔镜,患儿取健侧斜坡位,倾斜角度一般大于45度。通道位置:专用金属8 mm工作通道,套管远端有“两细一粗”的标记横线,粗黑线一般置入腹壁,插入过深会减少操作空间从而影响手术操作;选取脐部建立镜头通道,其他两个通道位于前正中线上、脐上下方距脐部6~8 cm处,见图1。麻醉满意后,患儿取健侧45°斜坡卧位,患侧腰部垫高。经脐部直视下穿刺8 mm专用通道并建立气腹。置入腹腔镜,于前正中线上距脐部上、下6~8 cm处建立两个通道,作为1号、2号臂操作孔。弯剪刀经结肠系膜入路打开后腹膜及肾盂表面筋膜,钝锐结合法分离扩张的肾盂。提起扩张的肾盂前壁,弯剪刀电凝小心游离,充分暴露肾盂前壁、后壁及上段输尿管,可见肾盂壁炎性增厚,周围组织稍粘连,肾盂输尿管连接处迂曲狭窄。弯剪刀于狭窄段上方修剪肾盂呈舌形瓣备用,在狭窄段下方0.5 cm处剪开输尿管壁,于输尿管外侧纵行劈开输尿管1~2 cm,用5-0可吸收线将肾盂瓣下角与输尿管劈开部位最低点缝合,先吻合肾盂瓣、输尿管后壁,置入4.8 F双J管,间断缝合输尿管前壁,连续缝合关闭修剪后的肾盂瓣,留置肾周引流管一根,关闭结肠系膜裂孔。留置8#双腔导尿管一根,结束手术。见图2~图5。
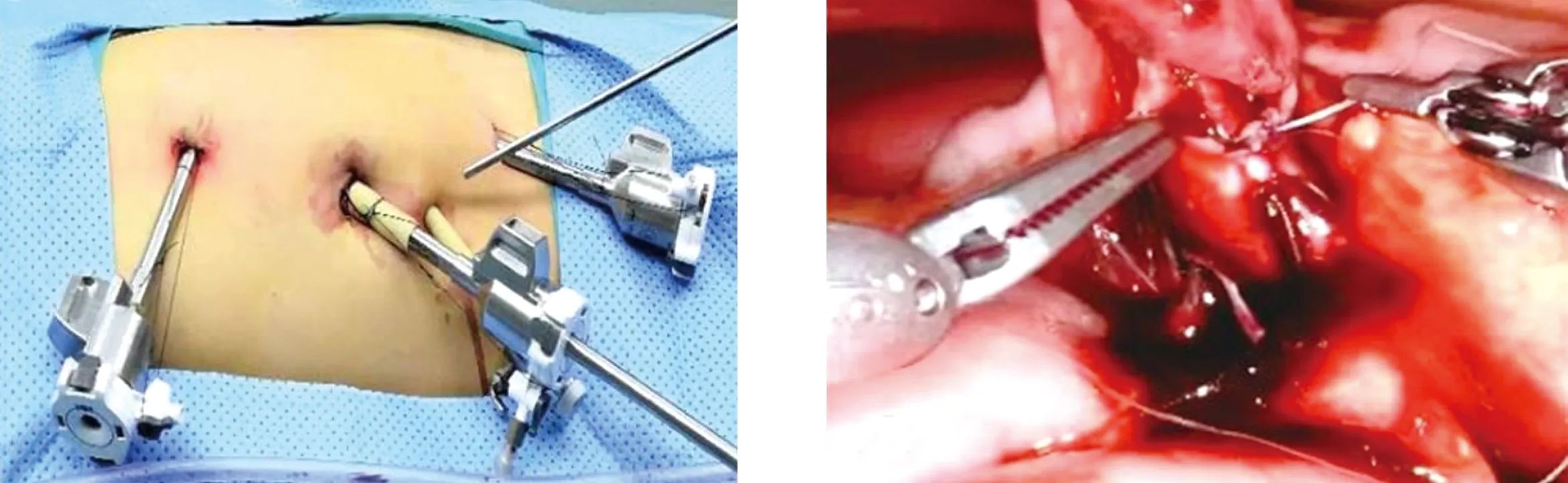
图1 切口位置(相距6~8 cm) 图2 后壁缝合
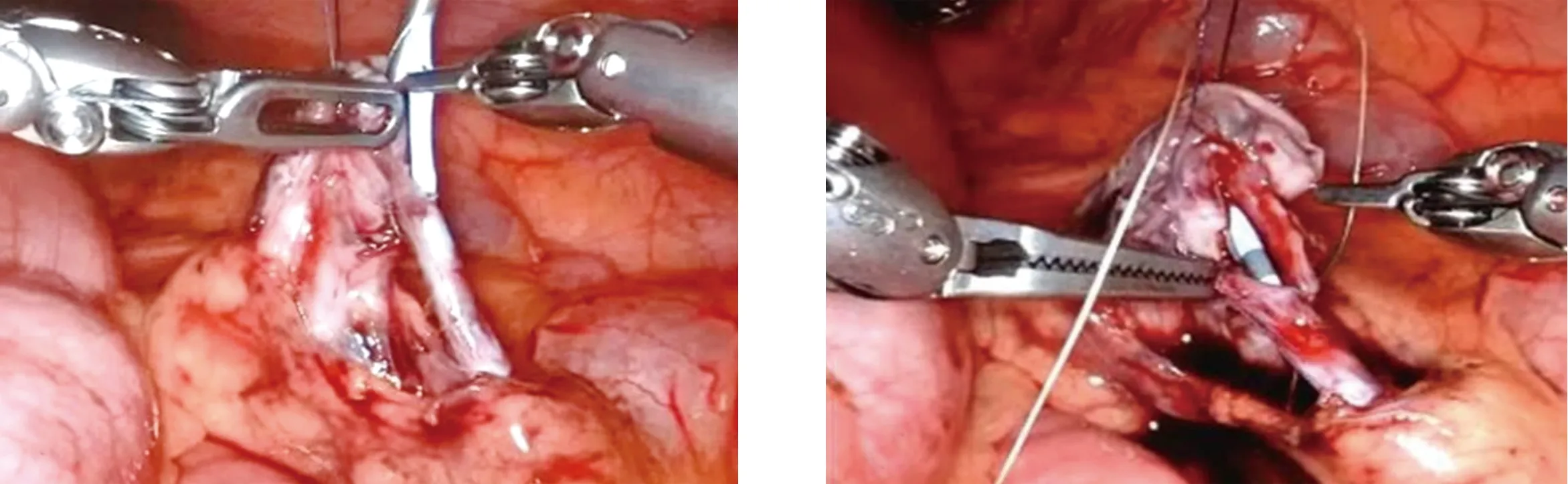
图3 留置双J管 图4 缝合前壁
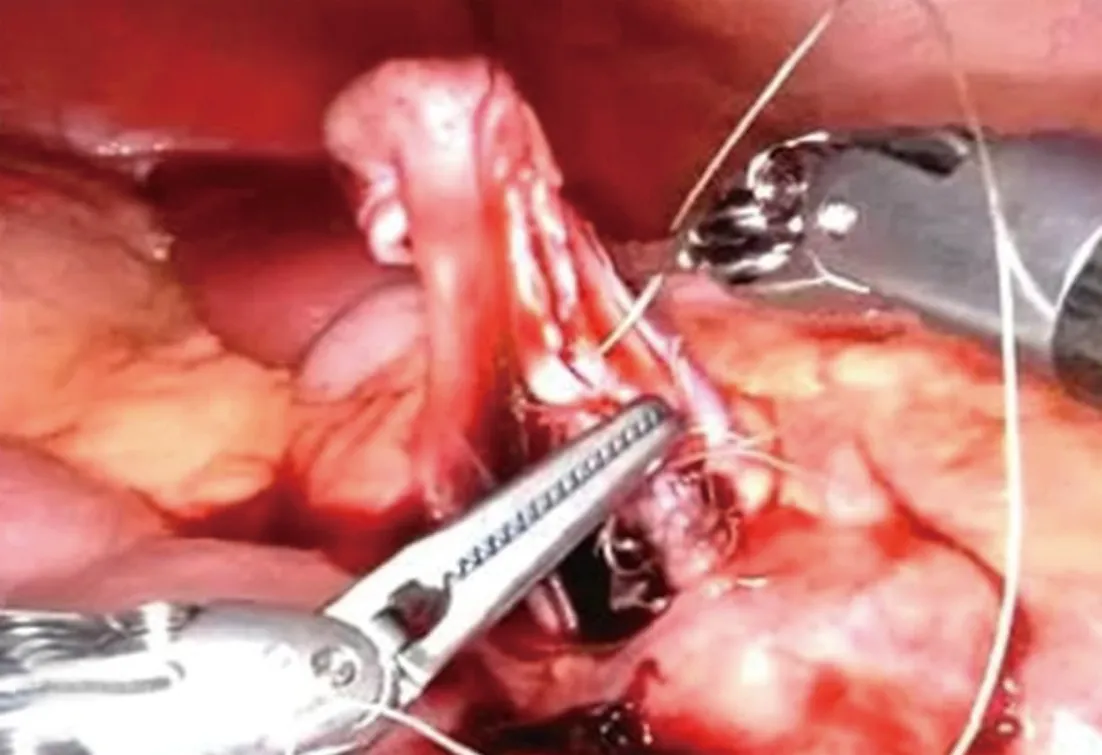
图5 缝合肾盂
2 结 果
3例手术均顺利完成,无中转传统腹腔镜或开放手术,无术中并发症发生。手术时间(器械对接完毕至缝合皮肤时间)分别为143 min、95 min、115 min;吻合时间分别为58 min、30 min、43 min,估计术中出血量分别为10 mL、5 mL、10 mL。病例2于术后第1天出现肉眼血尿,经保守治疗后于术后第3天缓解,其他病例术后无尿瘘、血尿、泌尿系感染等并发症发生。术后分别住院7 d、6 d、8 d。3例患儿术后均取出双J管,分别随访3.5个月、4个月、4个月;泌尿系B超比较术前与术后3个月的肾积水情况作为评价手术效果的标准,术后3个月复查时患侧肾盂扩张分别为2.0 cm、1.8 cm、1.8 cm;术后积水程度均较术前缓解。
3 讨 论
达芬奇机器人系统于1997年由美国研发,于2000年被美国食品和药物管理局批准应用于临床[8],并逐渐在多个临床学科推广应用[9]。自2001年开始,国内外逐渐有关于达芬奇机器人技术应用于小儿外科肾盂积水的报道[7,10-11]。因其具备:(1)可提供放大15倍的3D手术操作视野;(2)EndoWristTM系统可模拟“臂+腕”的手术操作动作;(3)可消除术者操作中的细微震颤等;(4)提高外科医师的舒适度,降低了疲劳度[12]等优点,逐渐被国内外外科医生接受并推崇。
2020年8~9月本治疗组顺利为3例UPJO引起的肾盂积水患儿施行达芬奇机器人肾盂成形术,1例术后短期内出现肉眼血尿,经保守治疗2 d后完全缓解。通过术后3.5~4个月的随访,3例患儿术后肾积水程度较术前明显缓解,且均未发生其他并发症,表明此技术在小儿肾盂成形术中的应用是安全、有效的。这与文献报道[7,13-17]一致。而Yee等[18]、Franco等[19]认为,与传统腹腔镜肾盂成形术相比,机器人手术会增加手术时间,原因在于术前准备时间长,术中更换操作器械需成熟的经验及熟练的配合。而在葛京平等[20]、Patel等[21]的研究中,去除术前准备时间,单纯就术中操作时间而言,机器人技术的应用缩短了肾盂成形术的术中操作时间;Esposito等[22]也认为,机器人技术可有效缩短术中吻合时间。而在术后并发症方面,Braga等[23]的Meta分析认为,机器人与传统腹腔镜肾盂成形术相比差异无统计学意义。
腹腔镜肾盂成形术最困难之处在于腹腔内的缝合操作,且学习曲线相对较长[24-25]。传统腹腔镜手术的腔内缝合存在诸多困难,如二维图像、器械灵巧性欠缺、精细操作震颤、操作者的疲劳等问题。达芬奇机器人提供双眼3D手术视野,EndoWristTM系统配合特殊的手术器械,可提供类腕关节运动,消除细微震颤,更便于精确、稳定的缝合。因此本团队认为,机器人技术可降低手术难度,对术者缝合技术的要求低于传统腹腔镜手术。这与Tasian、Marcus等提出的“机器人肾盂成形术学习曲线更短”的结论一致[26-27]。
通过本组3例机器人手术,本团队总结经验技巧:(1)操作孔道的建立:机器人Trocar专用通道间距应为6~8 cm,辅助孔与专用通道间至少相距5 cm,可有效避免术中器械间的碰撞。选择Trocar位置时应围绕病变组织,遵循三角原则(即以病变部位为操作孔道的中心)。观察孔可选在脐部,经自然腔道建立Trocar孔利于隐藏瘢痕,其余操作孔可遵循上述原则选取,沿皮肤纹路做小切口,术后缝合戳孔后再使用医用胶粘合戳孔处皮肤,使皮肤对合更平整,可有效减轻术后瘢痕的形成。(2)由于小儿腹腔空间小,且肾盂成形术中视野较为集中固定,活动角度较小,因此连接机械臂前,先使用传统器械寻找、定位病变部位,再固定机械操作臂位置,可缩短手术时间,更好地发挥机器人的优势。(3)机器人专用Trocar上的粗黑线至末端长约3 cm,且与成人相比,小儿腹壁更薄。因此可在腹壁外的Trocar上包裹一段橡胶管(可剪取2~3 cm的T形引流管或蘑菇头引流管),与戳孔周围皮肤缝合固定。一方面可避免退出器械时Trocar脱出,另一方面可缩短置入腹腔内的Trocar长度,虽然专用套管置入腹腔的长度仅减少1 cm,但可明显增加手术操作空间。(4)助手及器械护士需熟练机器人手臂与器械对接、转换的操作,助手可通过辅助孔完成吸引、牵拉、进出缝针、剪线等操作,以减少机器人器械进出Trocar、反复更换,节省手术时间。(5)由于机器人专用器械价格昂贵,且有使用次数限制,因此每次肾盂成形术可仅选用弯剪刀、持针器两种器械完成手术。但弯剪刀在电凝、游离组织方面,与传统腹腔镜手术中消融电极、电凝钩、超声刀有所不同,使用技巧还需积累。(6)与传统腹腔镜器械相比,机器人器械缺乏触觉反馈,尤其打结、牵拉组织方面。打结时过度用力容易扯断缝线,需要通过视觉与经验判断线结是否打紧;牵拉组织时过度用力,可能夹伤或撕裂软组织,因此需轻柔操作,逐渐积累经验。(7)术中如需牵拉、显露(如缝合肾盂、输尿管时)可将4-0可吸收缝线的针掰直,后选取合适部位经皮肤穿刺入腹,于腹腔内缝合需牵拉组织,再于合适部位穿出腹壁,于腹壁外牵拉显露,可减少一个辅助孔。(8)术中置入双J管时使用气腹针的套管自剑突下略偏患侧处穿刺入腹,将双J管及导丝经气腹针套管置入,可避免因腹腔空间过小导致的双J管置入困难。置入双J管时尽量避免气腹针套管内的脂肪或其他软组织一并置入,以减少术后泌尿系结石的发生率。(9)双J管置入后,于耻骨上(腹壁外)或盆腔内(腹腔内)按压膀胱,观察有无尿滴自双J管肾盂端侧孔渗出。如术中置入双J管有阻力或置入后按压膀胱无尿液反流,可于术中借助B超确定双J管下端位置,避免双J管下端于输尿管内打折、过短、未置入膀胱。
尽管自2004年以来国内外越来越多的研究表明[10,28-30],婴幼儿机器人手术是安全、有效的,但其在技术上仍具有一定的挑战性。早期的婴幼儿机器人手术相关报道的病例数均较少,多为个案报道,手术时间也较长,技术尚不够成熟。随着器械革新、技术积累,至近5年,婴幼儿机器人手术的病例数才逐渐增加。一般认为3岁以上偏瘦患儿是8 mm机器人手术的理想病例。一方面是因为此年龄段的患儿肠管胀气相对较轻,有足够大的腹腔空间,便于腹腔内的操作;另一方面因偏瘦的患儿体内器官表面脂肪组织较薄弱,利于解剖肾盂输尿管、系膜。随着达芬奇机器人专用Trocar经12 mm-8 mm-5 mm的逐渐演变,操作器械也逐渐精细、改进,对腹腔内操作空间的要求逐渐放宽。目前本团队所完成的3例机器人腹腔镜肾盂成形术均使用8 mm专用Trocar,在病例选择上仍存在一定局限性。
虽然机器人技术存在诸多优势,但不可否认,与传统腹腔镜手术相比,机器人技术仍存在不足。(1)达芬奇系统及相关器械的引进、使用费用均较高,给医疗中心、患儿家庭均造成一定的经济负担;(2)机器人设备占用空间较大,对手术间面积有一定要求;(3)操作系统无触觉反馈,术者需根据视觉及经验调整力量;(4)操作器械较为精细,且有使用次数限制,反复更换器械头及探查腹腔、游离周围组织、显露病变等大范围操作易损坏器械;(5)与传统腹腔镜5 mm Trocar相比,目前本团队使用的8 mm专用Trocar需要更大的切口。达芬奇机器人技术是医疗科技在新环境下的重大革新,也是腹腔镜技术在微创理念影响下的进化与延伸。随着医疗科技的逐渐进步发展,本团队相信目前遗留的这些不利因素会得到改进,达芬奇机器人技术也会逐渐推广至更多学科、更多疾病中。但在目前的医疗环境下,仍需术者做好术前沟通工作,避免因客观不利因素导致不必要的纠纷。
总而言之,本团队认为小儿机器人肾盂成形术治疗UPJO安全、有效,术中、术后并发症少,其最大优势在于降低了术中缝合难度。但此技术尚处于初始阶段,需摸索经验,总结技巧。