10 kV 太空电子枪的光学系统设计及仿真研究
2021-05-12董全林邵静怡刘洋洋王军伟裴一飞
陈 鹤,董全林*,邵静怡,刘洋洋,王军伟,裴一飞
(1. 北京航空航天大学 仪器科学与光电工程学院,北京 100191;2. 北京卫星环境工程研究所,北京 100094)
0 引言
电子束焊接技术由于其能量密度高、焊缝深宽比大等诸多优点被广泛应用于太空焊接[1]。基本上所有电子束装备都离不开核心部件——电子枪[2],电子枪的性能直接决定电子束性能的优劣,而电子枪的性能取决于其电子光学系统的结构[3]。
通常认为材料表面电子在获得足够能量后会垂直于材料表面逸出到真空环境中,此后受到电场力的作用而改变方向。太空焊接用电子枪要将逸出的电子束进行汇聚,必须采用聚焦系统[4-6]。目前,常用的电子聚焦方法有磁聚焦和静电聚焦。磁聚焦系统主要应用在电子显微镜、电子扫描探针等大型室内分析型设备中,其优点是易于满足旁轴条件,不易出现高压打火等现象;但是,此类系统结构庞大、功耗大,安装调试复杂。而静电聚焦主要利用电场力实现对电子束的汇聚,结构简单、工作时无额外功耗[7-8]。
太空焊接用电子枪的电子束半径在0.1 mm 量级,对聚焦系统的要求较高,综合考虑功耗、体积和易控性等因素,以及聚焦系统与阴极发射系统和阳极靶的匹配后,通常选择磁聚焦系统。本文将详细介绍10 kV 太空电子枪光学系统的设计方法及流程。
1 一级聚焦电子光学系统
一级聚焦电子光学系统(简称一级聚焦系统)包括高压部分、三极电子枪和1 个聚光镜,电子枪阴极材料选用六硼化镧(LaB6),系统已知的性能参数和设计目标如表1 所示。经计算,电子衍射效应产生的束斑直径极限在0.1 nm 量级,远小于大束流要求的0.1 mm 量级。阴极发射电子束在阳极孔下端附近产生束腰(即电子束轨迹中第1 个最小横截面的位置),阴极和阳极轴上距离约为6.6 mm。
1.1 电子枪参数计算
考虑阴极寿命、加热温度以及发射束流等因


表 2 钨与LaB6 阴极电子枪参数Table 2 Parameters of tungsten and LaB6 cathode electron guns
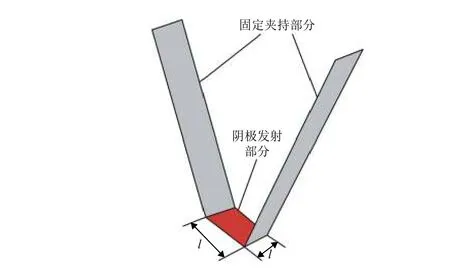
图 1 实际使用的钨阴极结构Fig. 1 The actual tungsten cathode structure
电子枪结构及其电子束轨迹如图2 所示。
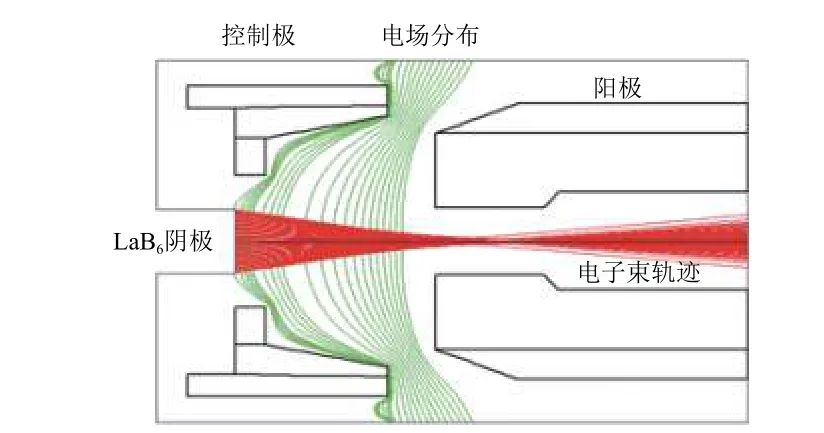
图 2 电子枪结构及其电子束轨迹示意Fig. 2 Schematic diagram of the structure of electron gun and its electron beam trajectory
1.2 聚焦线圈参数计算
一级聚焦系统结构设计如图3 所示,其中:阴极端面中心为坐标原点O,束腰在距O点11 mm处,聚光镜中心线距O点285 mm;S为极靴间隙;D为极靴孔直径;假设工作平面距聚光镜下端面300 mm,即工作距离为300 mm。
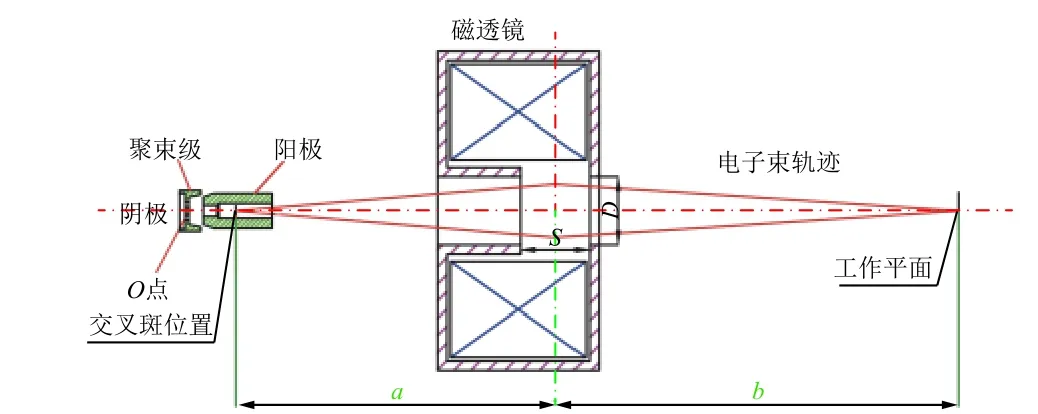
图 3 一级聚焦系统结构示意Fig. 3 Schematic diagram of the single-lens focusing system
由聚光镜像距b=315 mm,物面交叉斑直径h1=0.3 mm,像面束斑直径h2=0.4 mm,可根据牛顿光学公式

计算得到聚光镜物距a=236.25 mm。
继而可根据焦距公式

计算得到聚光镜焦距f1=135 mm。
1.3 一级聚焦系统仿真
ABER 程序利用一阶有限元法来计算光路图,可以涵盖聚光镜以及偏转器的光路仿真。根据此程序进行计算,可得到一级聚焦系统性能参数的仿真结果如表3 所示,光路如图4 所示。
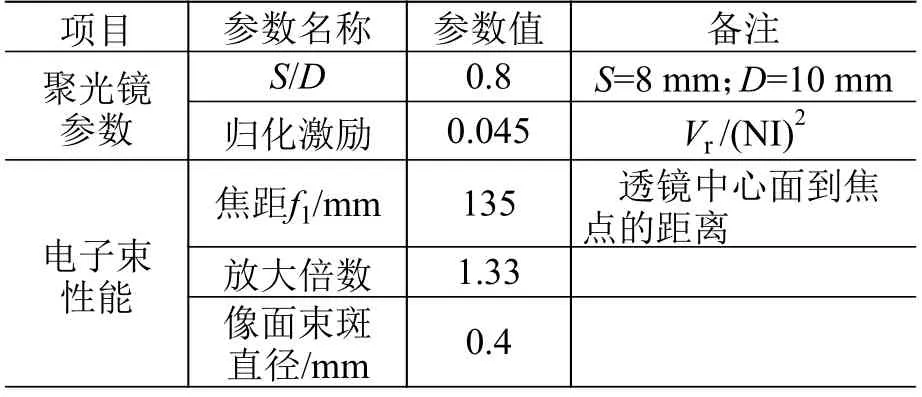
表 3 一级聚焦系统性能参数Table 3 Performance parameters of the single-lens focusing system
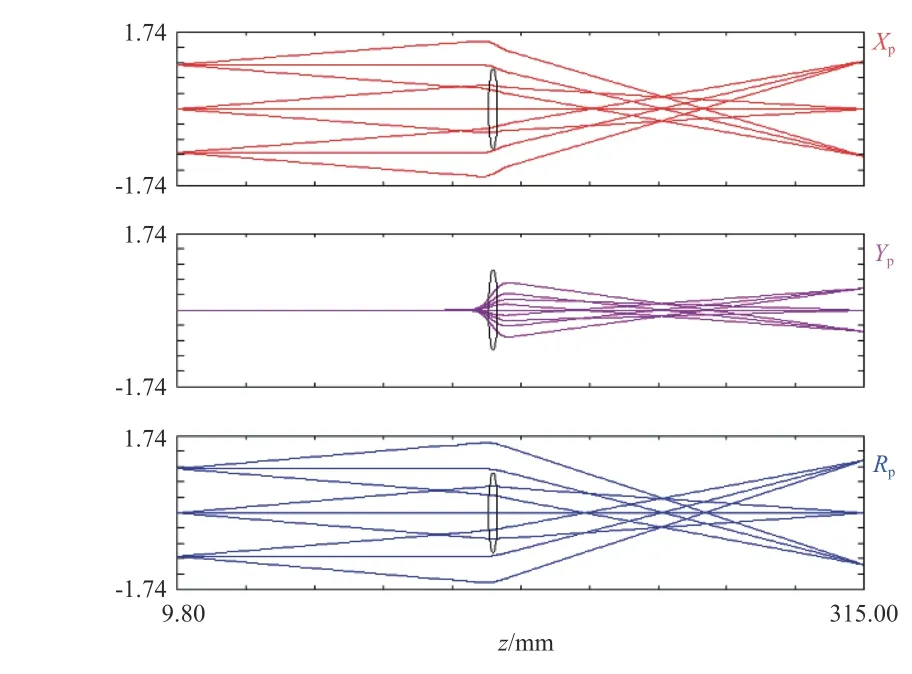
图 4 一级聚焦系统光路图Fig. 4 Optical path of the single-lens focusing system
图4 中:Yp表示的是模拟轴上电子束的出射轨迹,Xp和Rp是不同电子束的出射轨迹;纵坐标表示电子束的径向位置。
为确保电子枪可以产生足够的束流,可通过Source 程序查看束流发射情况,如图5 所示。

图 5 一级聚焦系统电子轨迹图Fig. 5 Electron trajectory map of the single-lens focusing system
根据计算结果及图5 可以看出,聚光镜焦距仅有135 mm,并不能实现在工作距离为300 mm 时束斑直径为0.4 mm 的设计目标;并且束流经过透镜时已经开始发散,使得束流的能量损失较多。因此需在此聚光镜前增加一级聚光镜(下文称新增聚光镜为第一聚光镜CL1,现有聚光镜为第二聚光镜CL2),成为二级聚焦电子光学系统(简称二级聚焦系统)。
2 二级聚焦电子光学系统
2.1 二级聚焦系统设计
二级聚焦系统结构设计如图6 所示,几何参数如表4 所示。该系统较之一级聚焦系统,为了调整束斑大小和系统结构将阳极长度增加到18 mm,并将聚光镜数量由1 个增加为2 个。
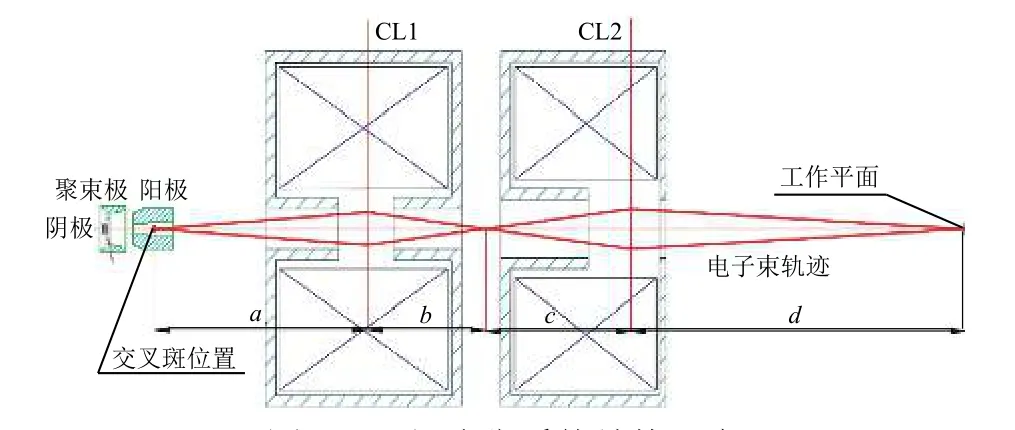
图 6 二级聚焦系统结构示意Fig. 6 Schematic diagram of the two-lens focusing system
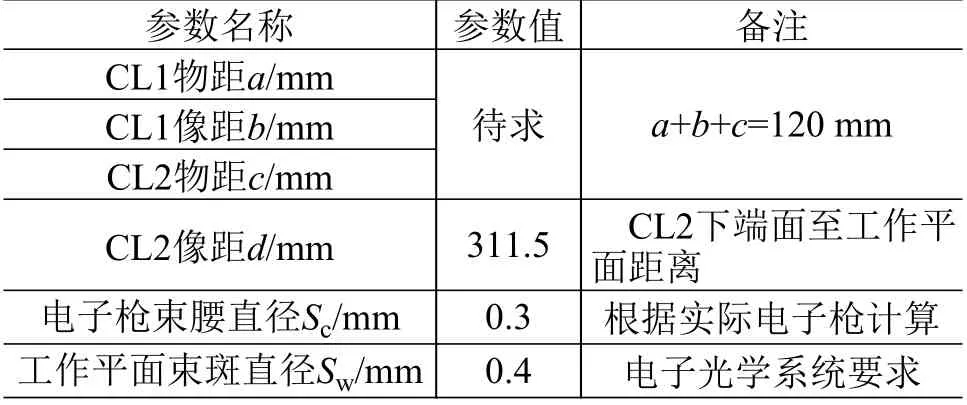
表 4 二级聚焦系统几何参数Table 4 Geometric parameters of the two-lens focusing system
由图6 可知,根据实际机械结构,CL1 的物距a、像距b与CL2 的物距c之和为定值;根据光学几何关系,a、b、c与CL2 的像距d之间应满足如下关系:
■
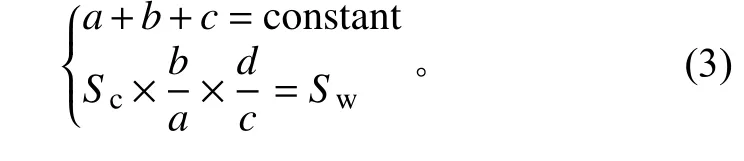
于是,可计算出参数a、b、c的值如表5 所示。
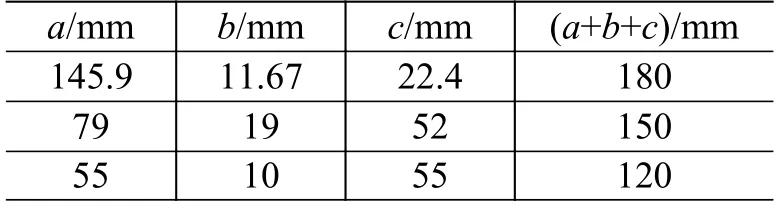
表 5 CL1 位置选取参数计算结果Table 5 Calculated results of position selection parameters for CL1
综合考虑机械结构,选取a=55 mm、b=10 mm、c=55 mm 作为初值,则可据式(2)计算得到CL1 的焦距f1=8.46 mm。
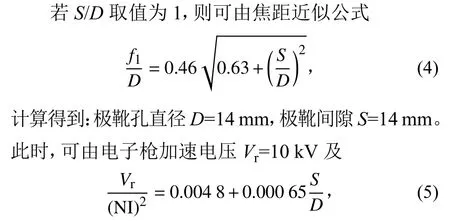
计算得到线圈激励参数NI=1361 A·T。
2.2 二级聚焦系统仿真
利用ABER 程序仿真得到上述二级聚焦系统光路如图7 所示。
由图7 可知,该二级聚焦系统不能保证电子枪束腰直径为0.3 mm,为此需要重新调整,将CL1 调成弱激励,CL2 调成强激励。经过迭代仿真,得到调整后的二级聚焦系统光路如图8 所示。
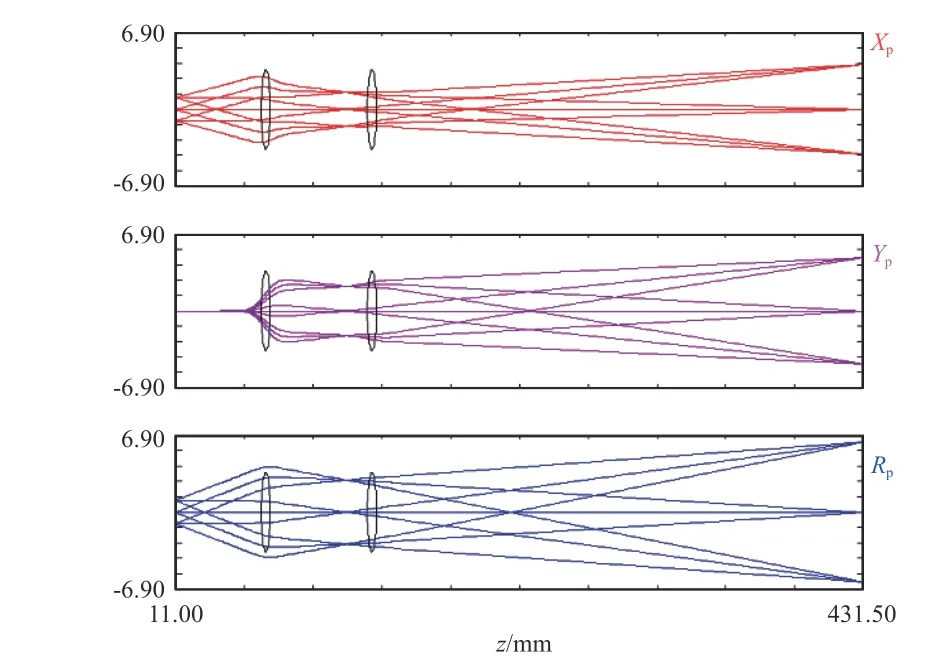
图 7 二级聚焦系统光路图Fig. 7 Optical path of the two-lens focusing system
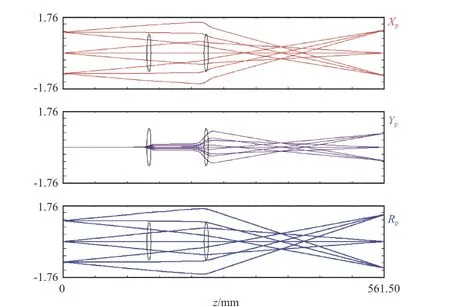
图 8 调整后的二级聚焦系统光路图Fig. 8 Optical path of the improved two-lens focusing system
3 电子光学系统设计参数
第2 章设计的二级聚焦系统的仿真结果显示其二级聚光镜的位置并不是最优的,因此需要通过迭代仿真得出满足设计目标的最优参数值,经调试优化后的电子光学系统参数如表6所示。
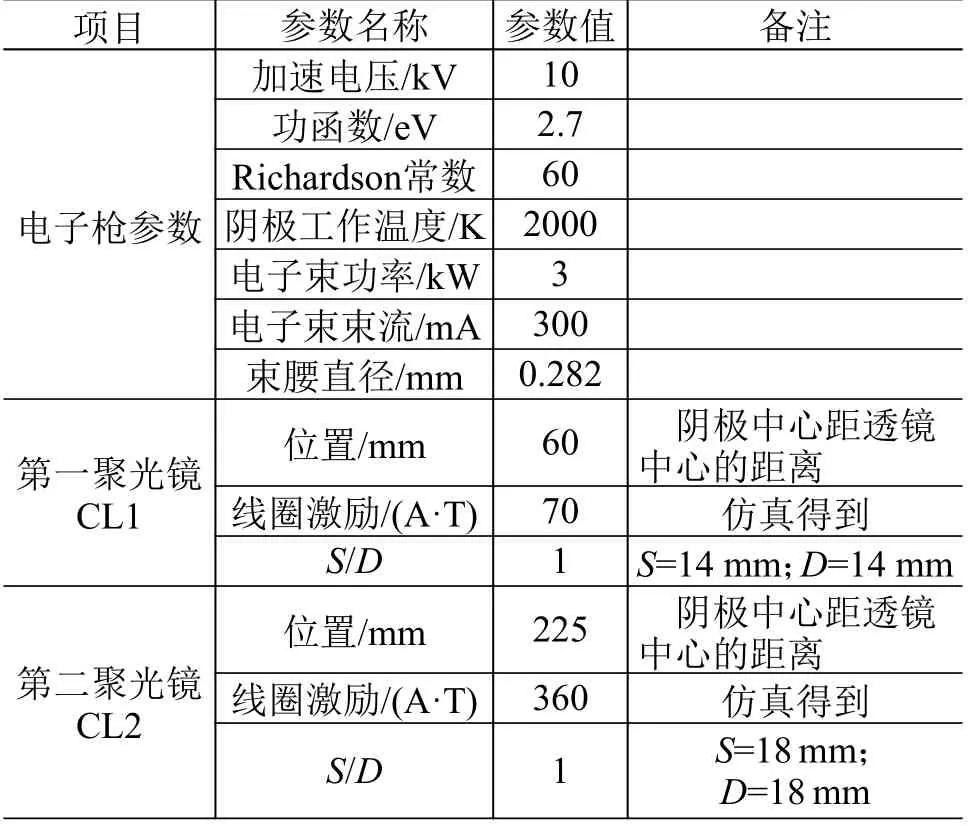
表 6 优化后的电子光学系统设计参数Table 6 Design parameters of optimized electronic optical system
由表6 可以看到,电子枪在保证电子束束流为300 mA 的情况下,电子枪束腰直径的最优解为0.282 mm,并未达到0.3 mm 的系统参数要求,但为了保证在300 mm 工作距离的像面上束斑直径能达到0.4 mm,表6 中的参数已是最优的结果。
4 结束语
综上所述,为实现太空电子枪项目的设计目标,根据前项工作中完成设计的电子枪结构和性能参数,设计了聚焦系统,并进行了光学计算及仿真分析。研究发现,一级聚焦系统不能实现在工作距离为300 mm 时束斑直径为0.4 mm 的设计目标,继而设计了二级聚焦系统。对二级聚焦系统的光学参数进行仿真分析表明,该系统能够实现既定设计目标。
需说明的是,现设计中未考虑大电流情况下库仑力对束斑质量的影响,后续研究会将这部分影响加入到电子枪的初值设计中。
