IGS RTS钟差数据中断的实时修复方法研究
2021-05-11范士杰彭秀英顾宇翔
范士杰,崔 凯,彭秀英,顾宇翔
(中国石油大学(华东)海洋与空间信息学院,山东 青岛 266580)
从2013年4月1日起,IGS实时服务(Real-Time Service, RTS)正式发布运行。RTS实时钟差产品是针对广播星历钟差的改正,播发格式为RTCM-SSR(RTCM State Space Representation),基于NTRIP(Networked Transport of RTCM via Internet Protocol)协议,通过Internet方式向全球实时播发[1]。目前,IGS的ESA,BKG等分析中心均可实时播发RTS钟差产品,且各分析中心对其发布的产品进行了精度评定,结果表明卫星钟差的精度优于0.3 ns[2-3]。IGS RTS实时数据流产品,现已广泛应用于实时精密单点定位(Real-Time Precision Point Positioning, RT-PPP)[4-6]、实时GNSS水汽反演[7-8]等方面。但是,由于网络传输等各种不确定性因素,RTS实时数据流产品普遍存在数据中断现象,严重影响用户使用和定位精度。臧建飞等采用“插值修复”方法,对RTS数据中断进行修复,极大地改善了数据的可用性。但是“插值修复”是一种事后处理方法,增加RTS数据的时延,无法满足RT-PPP的实时性需求[9]。宫晓春等提出一种基于一次差分的一次多项式钟差改正数预报算法,利用IGS03数据流产品分别进行30 s、1 min和5 min的钟差预报试验,预报结果均能满足RT-PPP的精度要求[10]。但是,随着预报时长的增加(如5 min),该算法与常用的多项式模型、灰色模型的预报效果相近。
针对RTS中断数据修复的实时性问题,本文基于卫星钟差预报算法,提出实时“预报修复”方法,即利用预报的钟差数据实时地修复中断缺失的数据。利用BNC软件连续接收4种RTS综合产品(IGC01、IGS01、IGS02、IGS03),通过对RTS产品卫星钟差数据中断区间分布的统计分析,确定5 min为预报修复的时间窗口;基于“预报修复”方法,采用改进的灰色系统模型进行实时预报修复实验;最后以IGS事后精密卫星钟差产品为参考,对修复的卫星钟差数据和产品(24 h)进行精度分析,以验证该方法的可行性。
1 基于灰色系统模型的钟差预报方法
灰色系统模型是通过对原始数据进行累加或累减运算,生成新的数据序列;然后对新数列建模,进行数值预报的方法。其中,灰色GM(1,1)模型是灰色系统模型中最常用的模型,它由一个仅包含单一变量的一阶微分方程所构成,适合对自身数据进行预报。RTS卫星钟差的变化以单调递增或者递减为主,符合灰色系统模型的建模条件[11]。
为进一步提升灰色系统模型预报的稳定性,一些学者对上述模型进行了改进[12-15]。本文采用残差修正方法[12],对灰色系统模型预报的钟差值进行改正,流程图如图1所示,具体步骤如下:

图1 基于改进GM(1,1)模型的卫星钟差预报流程
1)首先利用原始卫星钟差序列,构建卫星钟差的GM(1,1)预报模型;
2)根据GM(1,1)预报模型,计算卫星钟差的预测值;
3)利用卫星钟差的预测值序列,求出钟差预报模型的残差修正值序列,并由此建立残差修正值的GM(1,1)预报模型;
4)利用残差的GM(1,1)预报模型计算残差预测值,并将其加入到卫星钟差的预测值上,即可得到残差修正的卫星钟差预测值。
2 RTS钟差数据中断的实时预报修复
2.1 初始数据和钟差预报时间长度的选择
“预报修复”时所采用的初始数据时间长度和数值预报时间长度的选择至关重要。初始数据的时间长度与模型的初始化时间有关,时间长度过长会对PPP的实时性产生影响。而随着预报时间的增长,模型预报精度也会随之下降,从而影响到钟差数据修复的精度。对2017年1月6日到2017年1月12日连续7 d 4种RTS钟差产品的中断区间分布进行统计,结果如表1所示。发现4种RTS钟差产品5 min以内的数据中断均在97%以上,说明RTS钟差产品的数据中断主要以5 min以内的短区间中断为主。

表1 4种RTS钟差产品的中断区间分布统计 min
以2017年1月6日的IGS02产品为例,利用不同时间长度的初始数据,分别进行20 min、15 min、10 min、5 min时长的钟差预报。以IGS事后精密钟差产品(30 s)为参考,采用二次差的方法[3]统计出不同预报模式的钟差的均方根误差(RMS),如表2所示,表中预报模式栏中短横线“-”前方数字表示初始数据时间长度,后方数字表示预报时间长度。从表2中可以看出,钟差预报精度随着预报时长的增加而降低,尤其是预报时长大于初始数据时长的情况;对于5 min的预报时长,不同初始数据时长的预报效果接近,RMS均低于0.37 ns。
综合上述分析,本文选择钟差预报的初始数据时间长度为10 min、预报时间长度为5 min。具体的RTS钟差产品预报修复方案为:当RTS数据流有中断时,选取中断历元前10 min的数据,作为预报的初值,建立卫星钟差的GM(1,1)模型,并进行最长5min的数值预报,以修复中断的钟差数据。
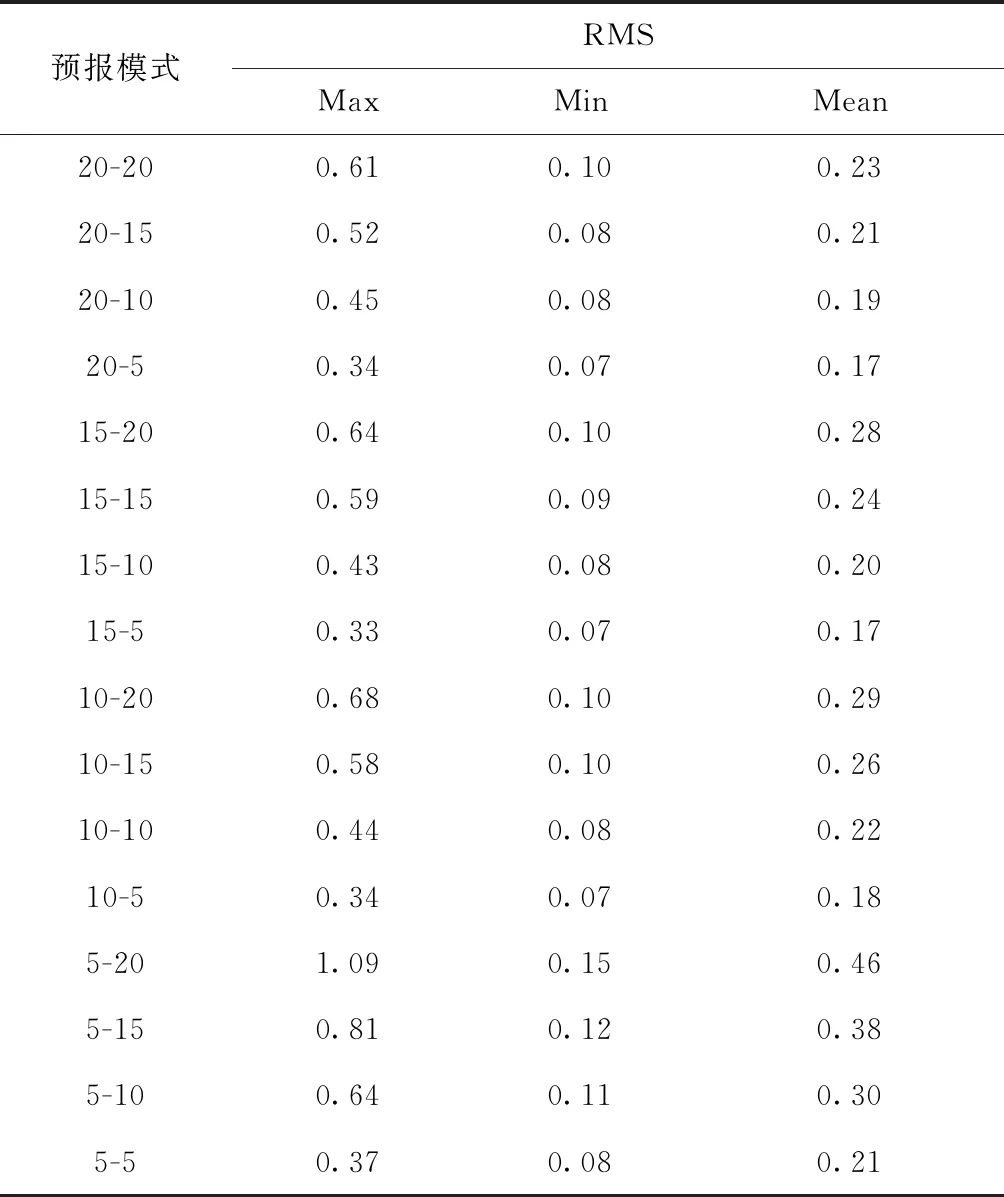
表2 不同时长的钟差预报精度(RMS)统计 ns
需要注意的是,如果中断区间的时长不足5 min,“预报修复”自动停止;考虑到钟差预报的精度,对于极少数超过5 min的数据中断,本文不进行预报修复,其原因将在2.2结合实时修复试验进行说明。
2.2 IGS02钟差产品的实时修复
1)预报修复值的精度分析。仍以IGS02钟差产品为例,对2017年1月6日到2017年1月12日连续7 d所有卫星发生数据中断的历元进行预报修复。以2017年1月9日到2017年1月11日的数据为例,修复前后的数据中断情况对比如图2所示。图2中有“点线”标志的地方为产生数据中断的历元,空白区域为有钟差数据的历元。由图2(a)—图2(c)可知,由于网络传输的不稳定性等原因,IGS02钟差数据出现大量的短区间中断(<5 min),其中大部分情况为某些历元全部卫星同时产生数据中断,也存在某些历元部分卫星产生数据缺失的现象,个别卫星(如PRN3、PRN4)甚至出现较长时间的数据中断,严重破坏钟差产品的连续性。预报修复后,IGS02钟差产品的数据连续性和可用性得以明显改善,消除了短区间中断,仅残留少数超过5 min的区间中断以及较长时间的数据中断,如图2(d)、图2(f)所示。由于超过5 min的数据中断所占比例很低,而个别卫星钟差数据的缺失不会对RT-PPP的连续性和定位精度造成明显影响,故本文对于超过5 min的数据中断,也只进行5 min的预报修复。

图2 修复前后的钟差数据中断对比
对上述连续7 d IGS02钟差产品发生数据中断历元的预报修复值,采用二次差的方法[3]与IGS事后精密卫星钟差产品(30 s)进行比较和精度评价。图3为所有卫星每天发生数据中断历元的预报修复钟差相对于IGS精密卫星钟差的均方根差(RMS),可知全部卫星连续7 d的预报修复钟差的RMS均在0.5 ns以内。表3给出上述预报修复钟差RMS的误差统计,修复钟差的平均RMS均在0.17 ns以内,实时“预报修复”方法的效果得以验证。

图3 所有卫星每天预报修复钟差的精度(RMS)

表3 所有卫星每天预报修复钟差的精度(RMS)统计 ns
2)修复前后24h钟差产品的精度对比。采用“预报修复”方法,对24 h钟差产品的数据中断进行实时修复,形成完整的钟差产品。以IGS事后精密钟差(30 s)为参考值,对连续7 d修复前后的IGS02钟差产品(24 h)进行精度对比,如图4所示。对于修复前IGS02钟差产品即原始IGS02钟差产品,提取采样间隔为30 s的IGS02钟差数据与对应历元IGS事后精密钟差进行对比并进行精度评定,其中存在数据中断的历元不参与钟差RMS的计算。而修复后的IGS02钟差产品,则是利用原始钟差数据和预报修复的钟差数据来进行钟差RMS的计算。由图4可知大部分卫星修复前后的RMS没有明显差异;虽然个别卫星数据中断修复后的RMS有所增大,但所有卫星数据中断修复后的RMS均在0.22 ns以内。表4给出连续7 d IGS02钟差产品(24 h)修复前后RMS的误差统计,从表中可以看出,修复前后每天24 h钟差产品的RMS基本一致,所有卫星钟差的RMS均在0.22 ns以内,每天所有卫星钟差的平均RMS均在0.12 ns以内。实时“预报修复”方法,不仅解决了RTS数据中断问题,保证RTS钟差产品的可用性和实时PPP的连续性,而且符合RT-PPP对卫星钟差数据的精度要求。

表4 24 h钟差产品所有卫星修复前后的精度(RMS)统计 ns
3 结束语
IGS RTS数据的连续性是满足RT-PPP应用的关键。针对RTS中断数据修复的实时性问题,本文基于钟差预报算法,提出实时“预报修复”方法。利用连续7 d的RTS钟差产品,基于“预报修复”方法,采用改进的灰色系统模型对发生数据中断的历元进行实时修复。以IGS事后精密卫星钟差产品(30 s)为参考,连续7 d的IGS02钟差产品,预报修复钟差的平均RMS优于0.17 ns,预报修复后24 h完整钟差产品的RMS均在0.22 ns以内。“预报修复”方法实现RTS数据中断的实时修复,极大地改善了RTS钟差数据的连续性,且中断修复后的钟差数据的精度与RTS钟差产品的标称精度基本一致,可以满足RT-PPP的实时性应用需求。

图4 24h钟差产品所有卫星修复前后精度(RMS)对比