采用换流器控制信号变化量极性特征的高压直流线路纵联保护
2021-05-11徐瑞东宋国兵侯俊杰张晨浩张宇轩
徐瑞东,宋国兵,侯俊杰,张晨浩,张宇轩
(西安交通大学电气工程学院,710049,西安)
高压直流输电具有输送容量大、功率调节灵活等特点,在远距离大容量电能传输、电网异步互联等领域快速发展[1]。高压直流输电线路距离长,所处环境条件复杂,输电线路故障是直流系统中发生概率最大的故障类型,约占50%,而其中瞬时性故障占90%以上[1-2]。对于瞬时性故障,利用电网换相换流器的自动重启逻辑可使系统恢复正常运行,减少不必要的停运。因此,快速准确地识别并隔离故障、提高瞬时性故障的重启成功率,对于高压直流输电系统的安全稳定运行至关重要。
目前,常规直流工程中的直流线路保护配置方案一般采用行波保护和微分欠压保护作为主保护,采用电流差动保护作为后备保护。行波保护反映网架参数的分布特性和频变特性[3-4],但存在抗干扰能力弱等问题。微分欠压保护反映行波的传播与衰减特性[5],但存在耐受过渡电阻能力弱,仅能在故障暂态进行判别等问题。电流差动保护用于甄别直流线路上的高阻故障,但受故障暂态期间长距离线路分布电容电流影响,实际工程中设置了600 ms的闭锁延时和500 ms的检测判别时间,即最快需要1.1 s才能动作[6-7]。据报道,曾多次发生直流线路高阻接地故障时,电流差动保护动作速度慢导致换流器保护区的低电压保护或大触发角监视保护动作,导致换流器闭锁从而被迫停运的事故[2]。
针对此问题,国内外学者开展了相应的研究。文献[8-9]针对电流差动保护受线路分布电容影响问题,在分布参数模型的基础上,提出了电容电流补偿法,提高了电流差动保护的动作速度,但存在计算量较大,整定值选取困难等局限;文献[10]利用触发角在区内外故障暂态下的变化率差异,基于余弦相似度函数构造保护判据,但考虑实际高压直流工程中控制器电流通常采集自装设在换流器高压直流极母线处的测点而非线路末端,因而该保护方案的适应性有待进一步分析;文献[11]利用整流侧触发角和直流系统中的二次谐波幅值构造保护判据,并未考虑逆变侧控制特性,对于逆变侧直流母线故障和逆变侧交流系统故障这两种区外故障,保护可能误动;文献[12]分析了区内外故障时系统运行点变化轨迹差异,利用电流偏差量构造纵联保护,但是受直流系统中线路电感和对地电容的影响,在换流器动态调节阶段,区内外故障时系统运行点的变化轨迹可能重叠,造成保护误动。这些保护原理由于没有充分考虑故障暂态期间换流器控制作用的影响,保护性能不足。因此,需要研究在暂态到稳态均能反映故障的保护原理,以提高直流线路保护性能。
在换流器控制开始响应到进入故障稳态前的时间段内,主要表现为控制器的快速调节带来的电压、电流变化[13]。这一阶段内控制器的响应特性包含着重要的故障信息。本文建立在对换流器控制特性和故障响应特性分析的基础上,利用整流器和逆变器的控制信号构造保护原理,从而提高线路后备保护的动作速度,利用PSCAD/EMTDC电磁暂态仿真软件验证了保护原理的性能。
1 高压直流换流器的控制特性
1.1 控制系统
基于国际大电网会议(CIGRE)标准直流输电模型搭建的双极直流输电系统如图1所示。
图1中:f1和f2为交流系统故障;f3、f4和f5为直流系统故障,其中f3为直流线路故障,f4和f5为直流母线故障。对于直流线路保护,f3属于保护区内,f1、f2和f4、f5属于保护区外。
CIGRE标准直流输电模型的换流器控制系统如图2所示。控制系统包含整流器定电流控制和最小触发角控制、逆变器定熄弧角控制和定电流控制。此外,还包括低压限流环节(VDCOL)、电流裕度平滑转换环节(CEC)和触发角限制环节。需要说明的是,逆变器定无功控制方式可采用定熄弧角控制或定直流电压控制,由于定熄弧角控制下逆变器稳态运行时熄弧角更小,设备利用率更高,因而CIGRE标准模型中采用了逆变器定熄弧角控制,本文也据此配置控制策略。

图2 CIGRE标准高压直流系统换流器控制系统Fig.2 CIGRE standard HVDC converter control system
图2中:整流侧控制器的被控量为整流侧直流电流Id_rec,测点位于换流站阀厅内的0磁通电流互感器(等效于图1中M1处);逆变侧控制器的被控量为逆变侧直流电流Id_inv和逆变器熄弧角γinv,分别由测点M4的电流互感器和换流器交流换相电压间接计算测得;控制器控制量为整流器触发角控制信号(以下简称整流器控制信号)αrec和逆变器触发超前角控制信号(以下简称逆变器控制信号)βinv,其中βinv以逆变器定熄弧角控制环节控制信号βγ_inv和定电流控制环节控制信号βI_inv经过比较器取最大值得到,即βinv=max{βγ_inv,βI_inv}。本文所利用的保护特征量为从控制器内部测量的整流器控制信号αrec、逆变器定熄弧角控制信号βγ_inv和逆变器定电流控制信号βI_inv这3个控制器输出量。
1.2 系统控制函数
如图2红色虚线方框所示,整流器定电流控制输出整流器控制信号αrec,控制函数为
(1)
式中:Id_rec为整流侧直流电流测量值;Iorder为经过极控制级电流定值Iref和VDCOL环节比较取小后得到的电流参考值,Iorder和Id_rec二者作差得到整流侧电流偏差量Ierror_rec;P1和TI1为PI调节器的比例系数和积分时间常数。
如图2蓝色虚线方框所示,逆变器定电流控制输出βI_inv,控制函数为
(2)
式中:Id_inv为逆变侧直流电流测量值;Ierror_inv为逆变器定电流控制环节的电流偏差量;P2和TI2为PI调节器的系数。
如图2蓝色实线方框所示,逆变器定熄弧角控制输出βγ_inv,控制函数为
(3)
式中:γinv为逆变器熄弧角,通常可由实测或间接计算的方法获取;γref_inv为逆变器熄弧角参考值;k为CEC环节的系数;γerror_inv为逆变器定熄弧角控制的熄弧角偏差量;P3和TI3为PI调节器的系数。
定义控制信号变化量为
(4)
式中:Δαrec为整流器定电流控制信号变化量;Δβγ_inv为逆变器定熄弧角控制信号变化量;ΔβI_inv为逆变器定电流控制信号变化量;αrec0、βγ_inv、βI_inv0分别为对应控制信号在系统正常工况下的测量值。
2 控制信号变化量的故障特征
2.1 整流侧交流系统故障
整流侧交流系统(即图1中f1处)发生故障时(以发生最严重的三相短路故障为例),控制信号的变化特性如图3所示。

(a)整流器控制信号 (b)逆变器控制信号图3 整流侧交流系统故障特征Fig.3 Fault characteristics on rectifier side in AC system
晶闸管具有单向导通特性,整流侧交流系统故障时,相当于直流系统的电源被短路[1]。在设计控制器时,实际工程中通过设置P1和TI1使得整个PI调节器以积分环节为主,而比例环节旨在提高控制器的快速性,主要在调节的起始阶段起作用。因此,在故障发生后换流器调节的起始阶段,Id_rec快速下降,式(1)中的比例项(P1dIerror_rec/dt)具有正极性且数值较大,而积分项(Ierror_rec/TI1)数值较小,这时αrec的变化极性由比例项(P1dIerror_rec/dt)决定,αrec减小,由式(4)可知Δαrec为负极性。
受到换流器控制作用的影响,直流电流Id_rec的变化率逐渐减小,而变化量逐渐增大,即式(1)中比例项(P1dIerror_rec/dt)的绝对值减小,而积分项(Ierror_rec/TI1)的数值增大,这时整流器定电流控制信号αrec的变化极性由积分项(Ierror_rec/TI1)决定,αrec继续减小。由式(4)可知,Δαrec仍为负极性,最终受到整流器控制策略的限制,进入最小触发角控制。
对于逆变器定电流控制,直流电流Id_inv小于Iorder-0.1,与本小节上文分析过程类似,逆变器定电流控制信号βI_inv增大,ΔβI_inv具有正极性。
对于逆变器定熄弧角控制,逆变器熄弧角的外特性方程为
(5)
式中:μinv为逆变器换相角;γinv为逆变器熄弧角;Lr为交流系统每相等值换相电感;Einv为换流变阀侧空载线电压有效值。
逆变器触发超前角βinv、换相角μinv和熄弧角γinv之间的关系满足
μinv=βinv-γinv
(6)
将式(6)代入式(5),得到
(7)
在发生整流侧交流故障时,直流电流Id_inv减小,Einv不变,由于此时逆变侧起作用的控制策略是定电流控制,即cosβinv减小,因此cosγinv减小,且由于γinv稳态值小于90°,所以逆变器熄弧角γinv增大。因此,由式(3)(4)可知,逆变器定熄弧角控制信号βγ_inv减小,Δβγ_inv具有负极性。在此需要说明的是,CEC特性旨在保证逆变器定熄弧角控制向定电流控制平滑转换,而在故障时,逆变器熄弧角大幅增加,因此对于式(3),γref_inv-γinv减小量的绝对值远大于CEC特性的γ增加量k(Iorder-Id_inv),即βγ_inv的变化极性不受CEC特性的影响。
综合本小节分析可知,故障后整流器由定电流控制切换为最小触发角控制,逆变器由定熄弧角控制切换为定电流控制模式,换流器控制信号的故障特征如表1所示。

表1 整流侧交流系统故障控制信号的故障特性
2.2 逆变侧交流系统故障
逆变侧交流系统(即图1中f2处)发生故障时(以发生最严重的三相短路故障为例),控制信号的变化特性如图4所示。

(a)整流器控制信号 (b)逆变器控制信号图4 逆变侧交流系统故障特征Fig.4 Fault characteristics on inverter side in AC system
整流侧直流电流Id_rec大于Iorder,Ierror_rec具有负极性。按照2.1小节的方法分析,由式(1)(4)(5)得整流器定电流控制信号αrec增大,Δαrec具有正极性,整流侧电流在含有低压限流特性的定电流控制模式下被控制到较低水平。
逆变侧直流电流Id_inv大于Iorder-0.1,Ierror_inv具有负极性。同理,由式(2)(4)得逆变器定电流控制信号βI_inv减小,ΔβI_inv具有负极性,受电流裕度控制的影响,逆变器定电流控制不起作用。
对于逆变器定熄弧角控制,逆变侧交流系统发生故障时,直流电流Id_inv增大。由式(7)得cosγinv增大,则逆变器熄弧角γinv减小。同理,由式(3)(4)得,逆变器定熄弧角控制信号βγ_inv增大,Δβγ_inv具有正极性,逆变器定熄弧角控制起作用以增大逆变器熄弧角。
综合本小节分析可知,故障后整流器保持定电流控制,逆变器保持定熄弧角控制模式,控制信号的故障特征如表2所示。

表2 逆变侧交流系统故障控制信号的故障特性
2.3 直流系统故障
直流系统(即图1中f3、f4、f5处)发生故障时(以正极接地故障为例),控制信号变化特性如图5所示。
(a)整流器控制信号 (b)逆变器控制信号图5 直流系统故障特征Fig.5 Fault characteristics of DC system
整流侧故障特征与2.2节类似,由式(1)(4)(5)得,整流器控制信号αrec增大,Δαrec具有正极性。
逆变器控制信号响应特性与发生整流侧交流故障时的响应特性类似,逆变器定电流控制起作用,βI_inv增大,ΔβI_inv具有正极性;逆变器定熄弧角控制不起作用,控制信号βγ_inv减小,Δβγ_inv具有负极性。
综合本小节分析可知,故障后整流器保持定电流控制,逆变器由定熄弧角控制切换为定电流控制模式,控制信号的故障特征如表3所示。
综合2.1~2.3小节分析可知,在不同位置故障时控制信号的变化量极性特征如表4所示。
3 保护方案
3.1 启动判据
系统发生故障时,两侧控制信号将显著变化,因此以控制信号变化率作为保护的启动判据。
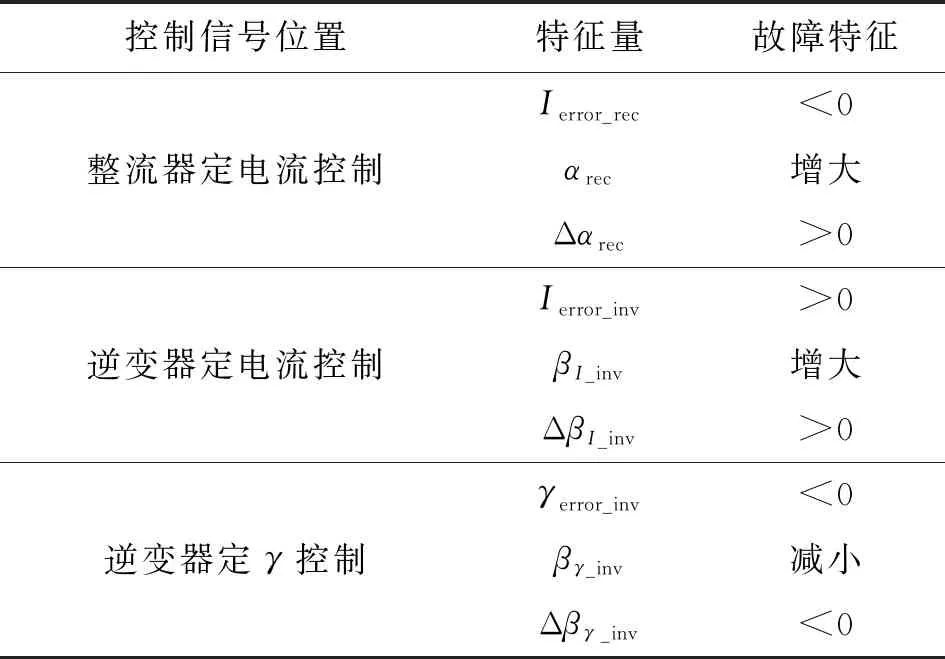
表3 直流系统故障控制信号的故障特性

表4 控制信号变化量的极性特征
对于整流侧,以控制信号变化率绝对值|dαrec/dt|作为启动判据;对于逆变侧,相比于定熄弧角控制信号βγ_inv,定电流控制信号βI_inv在故障时具有更快的响应速度(由系统控制特性决定),且只在故障暂态响应[1],具有不受系统运行方式变化影响的优点,因此选择逆变器定电流控制信号变化率绝对值|dβI_inv/dt|作为逆变侧的启动判据。由此,具体的启动判据为
(8)
式中:j=1表示正极,j=2表示负极;N为5 ms内的采样数,取一段时间窗内数据的平均值作为特征量,以躲避非故障雷击的影响[14],增强判据的抗干扰能力;δrec=max{δn,δs},δinv=δn,其中δn表示正常工况下控制信号变化率绝对值的最大值,δs表示系统运行方式改变引起控制信号变化的变化率绝对值最大值,具体的整定计算方法见第4节,以德-宝直流工程参数设置为例,可取δn=1 (°)/ms,δs=3.7×10-4(°)/ms,因而δrec=δinv=1 (°)/ms。
3.2 保护判据
结合式(4),并根据表4所总结的不同位置故障控制信号变化量极性特征的差异,构造双极高压直流输电系统的直流线路后备保护判据
(9)
式中:N′为20 ms内的采样数;αrec0_j、βI_inv0_j和βγ_inv0_j为对应控制信号的故障前稳态测量值,可由保护启动时刻前的20 ms存储数据取平均得到;k1、k2和k3为可靠系数。
正常运行工况下,为了降低换流器的损耗,整流侧的触发角和逆变侧的触发超前角都运行在较低的数值下[1]。以德-宝直流工程为例,正常运行时:αrec运行在15°左右,其调节范围为5°~150°;βI_inv运行在30°的积分下限,其调节范围为30°~110°;βγ_inv运行在37°左右,其调节范围为30°~75°。考虑区内故障时αrec和βI_inv的变化极性为正,它们的调节裕度充足,而βγ_inv的变化极性为负,区内故障发生后很快就到达调节下限,调节裕度较小。为提高判据的灵敏度,结合大量仿真验证,取k1=k2=1.5(考虑正极性特征),k3=0.95(考虑负极性特征)。交流系统发生不对称故障时,直流电压和电流中可能包含由交流侧负序分量传递至直流侧的非特征谐波[15],可能影响到控制信号,进而影响故障判别。因此,设置20 ms滑窗,对控制信号进行滤波。
3.3 保护流程

图6 保护方案实现流程Fig.6 Protection scheme flow chart
结合启动判据和保护判据,本文保护的算法流程图如图6所示。保护判据在检出直流系统故障后,需要检测来自直流母线保护的闭锁信号,以规避直流母线故障。考虑本文保护原理中的启动判据和保护判据分别存在5 ms和20 ms的数据计算窗长,即故障发生后保护在25 ms后出口,而直流母线差动保护能够在10 ms以内动作[1],并且具有足够高的可靠性和灵敏性,因此本文保护原理和直流母线保护能够在时序上形成配合关系,从而规避直流系统区外故障。
4 相关问题讨论
4.1 换相失败的影响
高压直流系统实际运行过程中,逆变侧交流系统故障引起换流母线电压下降、直流电流上升,从而可能引发逆变器换相失败,故障初瞬换流器未调节阶段出现首次换相失败,之后控制器响应,通过限制直流电流、增大逆变器触发超前角等方法来抑制换相失败[16]。
图7是逆变侧交流母线不同程度故障仿真结果。可以看出:若故障程度较深,如逆变侧交流母线金属性三相短路(图4a),则控制器的调节作用失灵,逆变器将发生后续换相失败;若故障程度较浅,如逆变侧交流母线单相接地(图4b),则受到控制器调节作用的影响,换相失败得到抑制,将不会发生后续换相失败。

(a)逆变侧交流三相短路 (b)逆变侧交流单相接地图7 逆变侧交流母线不同程度故障仿真结果 Fig.7 Simulation results for varying degree of faults occurring at AC bus at inverter side
首次换相失败的故障特征与逆变器直流出口发生短路故障类似,整流侧定电流控制响应,增大αrec以限制直流电流,Δαrec为正极性。逆变侧直流电流增大,定熄弧角控制信号βγ_inv以一定速度增大以调节逆变器熄弧角,Δβγ_inv具有正极性,而此时逆变器定电流控制不起作用,ΔβI_inv仍为负极性。
若故障程度较深,出现后续换相失败,逆变器熄弧角γinv受到交流系统故障的严重影响而固定下降为0,故障稳态时βI_inv维持在下限值,ΔβI_inv具有负极性,βγ_inv维持在上限值,Δβγ_inv具有正极性。若控制器调节作用起效,后续换相失败得到抑制,则故障特征表现为由逆变器在定电流控制和定熄弧角控制模式之间多次切换而造成的逆变器控制信号βI_inv和βγ_inv的波动。
综合本小节分析可知:严重交流故障引发的连续换相失败时,控制信号的故障特征表现为与逆变侧交流非换相失败故障一致,因而保护可靠不动作;程度较轻的交流故障引发的单次换相失败时,控制信号的故障特征表现为一定范围内的波动,此时可以通过提高逆变侧保护判据可靠系数的方法避免单次换相失败造成的影响。
4.2 分布电容的影响
由式(1)~(4)和表1~4分析可知,控制信号变化量的极性特征与相应的电气量偏差量相关,然而在实际系统中,受到故障暂态期间线路分布电容电流和非特征谐波的影响,在换流器动态调节阶段内电流偏差量的变化并不单调,其极性可能发生多次瞬时突变,仅总体变化趋势与表格中分析一致。
控制信号作为控制量,是偏差量经过控制器积分作用的结果,积分作用和判据中的滑窗滤波平滑了数据波动,因而具有良好的数值稳定性,故选择控制信号作为保护的特征量能够克服分布电容电流和非特征谐波等引起的电气量波动问题。本文保护原理能够在换流器动态调节阶段投入,相比于传统电流差动保护需要600 ms的闭锁延时和500 ms的判别时间,本文原理速动性更高。
4.3 系统运行方式改变对保护的影响
系统运行方式改变也会引起控制信号的变化,主要包括降功率运行和降压运行两种方式。降功率运行通常保持直流电压恒定,通过以预先整定的速率降低直流电流参考值实现。降压运行通常保持直流电流恒定,通过增大熄弧角参考值实现(降至80%额定电压运行),也可能同时降低直流电流和增大熄弧角来实现(降至70%额定电压运行)。
系统运行方式变化对控制信号的影响可以定量分析。直流系统的运行特性表达为
(10)
式中:Ud表示直流电压;Ud0表示换流变阀侧空载线电压有效值;Xr表示每相换相电抗;NC表示换流站每极6脉动换流器数。
令式(10)两边对时间t求导,得到
(11)
对于降功率运行,系统调节过程中直流电压恒定,因而式(11)可以化简为
(12)
考虑α取最小值(即系统未调节时的触发角)时,|dαrec/dt|取得最大值δs1,即
(13)
同理,可得降压运行时整流器控制信号变化率最大值δs2的计算方法
(14)
结合式(13)(14),在整流侧通过对启动判据的整定,可以避免保护在系统调节过程中多次启动。
在逆变侧,运行方式的调整始终属于正常运行工况的一部分,调节过程由逆变器定熄弧角控制βγ_inv完成,而定电流控制量βI_inv作为一种故障期间的限流措施,受到电流裕度控制的约束,在系统运行方式改变时并不响应。因此,以定电流控制信号变化率作为启动判据的逆变侧不受系统运行方式改变的影响。
以德-宝工程的整定速率为例,系统不同运行工况下整流侧控制信号的变化率最大值如表5所示。
由表5可知,系统降功率运行调节过程中,整流侧控制信号αrec的变化率不超过5.4×10-6(°)/ms,降压运行调节过程中,整流侧控制信号αrec的变化率不超过3.7×10-4(°)/ms,均远小于启动判据整定值,因此整流侧不启动。逆变侧定电流控制信号原理上就不受系统运行方式改变的影响,因此逆变侧也不启动。
4.4 数据同步问题
本文保护方案利用换流器控制器内部的控制信号变化量极性差异实现故障甄别,且线路保护的出口是换流器的自动重启逻辑,因此保护主机可与控制主机装设在一起,甚至直接由控制主机的附加控制程序来实现。而且,本文纵联保护原理仅需由逆变侧向整流侧发送反映故障方向的逻辑信息,减小了通信数据量,不存在对时问题。

表5 系统不同运行工况下整流侧控制信号变化率
5 仿真验证
基于PSCAD/EMTDC电磁暂态仿真软件,搭建了如图1所示的±800 kV双极HVDC系统模型。输电线路采用分布参数模型,全长1 500 km,仿真采样频率为10 kHz,故障时刻在2.5 s。
5.1 整流侧交流故障
整流侧交流母线f1处发生三相短路故障时的仿真结果如图8所示。

(a)启动判据动作结果 (b)整流器定电流控制

(c)逆变器定电流控制 (d)逆变器定熄弧角控制图8 整流侧交流母线三相短路故障仿真结果Fig.8 Simulations result of rectifier-side AC bus when a three-phase short-circuit fault occurs
由于交流母线故障时直流正负极故障特征一致,因而仅展示正极仿真结果。控制信号变化量的极性特性满足表1分析结果。若规定由换流器指向直流线路的方向为保护正方向,则整流器控制信号变化量具有负极性,判别为反向故障,如图8b所示;逆变器定电流控制信号变化量具有正极性,定熄弧角控制信号变化量具有负极性,判别为正向故障,因此纵联保护判别为区外故障,保护不动作,如图8c、8d所示。
5.2 逆变侧交流故障
5.2.1 三相短路导致连续换相失败 逆变侧交流母线f2处发生三相短路故障时的仿真结果如图9所示。逆变侧交流母线发生的三相短路故障引发了逆变器的连续换相失败。控制信号的故障特性满足表2和4.1节分析结果。

(a)启动判据动作结果 (b)整流器定电流控制

(c)逆变器定电流控制 (d)逆变器定熄弧角控制图9 逆变侧交流母线三相短路故障仿真结果Fig.9 Simulation results of inverter-side AC bus when a three-phase short-circuit fault occurs
从图9可以看出:整流器定电流控制信号变化量具有正极性,判别为正向故障,如图9b所示;逆变器定电流控制信号变化量具有负极性,定熄弧角控制信号变化量具有正极性,判别为反向故障,保护判别为区外故障,保护不动作,如图9c、9d所示。
5.2.2 单相短路导致单次换相失败 逆变侧交流母线f2处发生单相接地故障时的仿真结果如图10所示。逆变侧交流母线发生的单相接地故障在故障初瞬引发了逆变器的首次换相失败,随着故障的发展和控制器的调节,不出现后续换相失败。

(a)启动判据动作结果 (b)整流器定电流控制

(c)逆变器定电流控制 (d)逆变器定熄弧角控制图10 逆变侧交流母线单相短路故障仿真结果Fig.10 Simulation results of inverter-side AC bus when a single-phase ground fault occurs
如图10c、10d所示,逆变器定电流控制信号变化量在故障初期具有正极性,随后变为负极性,而定熄弧角控制已经响应,其控制信号变化量始终具有正极性,因此逆变侧判别结果为反向故障,区外故障时保护不会因首次换相失败影响而误动。
5.3 直流线路故障
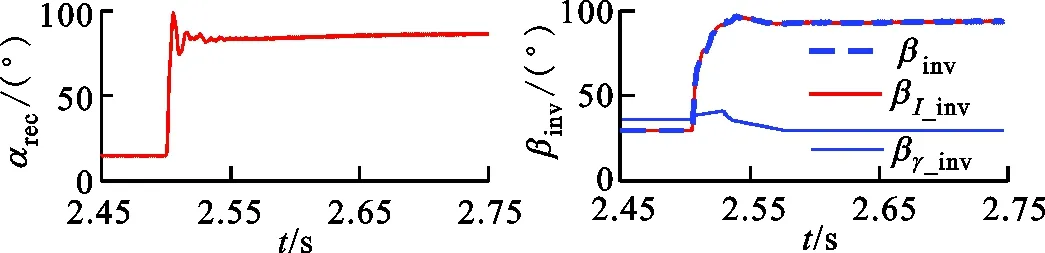
5.3.1 保护性能验证 正极直流线路f3处发生接地故障时的故障极仿真结果如图11所示。

(a)正极启动判据动作结果 (b)正极整流器定电流控制

(c)正极逆变器定电流控制 (d)正极逆变器定熄弧角控制图11 直流线路正极接地故障时故障极波形Fig.11 Simulations result of faulty pole when a positive pole ground fault occurs on DC line
从图11可以看出,当发生正极线路故障时,保护快速启动。对于故障极,控制信号变化量的极性特征满足表3分析结果,整流侧和逆变侧都进入定电流控制模式,整流器控制信号变化量具有正极性,判别为正方向故障,如图11b所示;逆变器定电流控制信号变化量具有正极性且定熄弧角控制信号变化量具有负极性,因此逆变侧也判别为正方向故障保护动作,如图9c、9d所示。
图12是直流线路正极接地故障时的健全极波形。可以看出:受到线路耦合影响[17],健全极电压电流也将在故障初瞬波动,进而引起健全极控制信号的波动,但始终没有进入两侧判据的动作区,因此健全极保护不动作。

(a)负极启动判据动作结果 (b)负极整流器定电流控制

(c)负极逆变器定电流控制 (d)负极逆变器定熄弧角控制图12 直流线路正极接地故障时的健全极波形Fig.12 Simulation results of healthy pole when a ground fault of positive pole of DC line occurs
5.3.2 抗过渡电阻性能验证 在直流线路(f3处)的首端、中点、末端分别设置0.01、250、500 Ω的正极接地故障,验证保护抗过渡电阻性能,保护动作结果如表6所示。

表6 区内故障仿真结果
由表6可知,本文保护原理耐受过渡电阻的能力较强,对于500 Ω高阻接地故障,保护仍能够正确动作。此外,根据控制器的响应特性分析可知,对于线路首端、中点或末端故障,控制信号变化量的极性特征相同,即本文保护原理不受故障距离的影响,且不存在保护死区。
5.3.3 抗干扰性能验证 考虑到实际条件下空间噪声和互感器传变误差可能对控制器电气量的测量造成干扰,进而影响到控制信号的测量,因此在控制信号上叠加信噪比为40 dB的白噪声,对保护原理的抗干扰性能进行验证[18],仿真结果如表7所示。可以看出,40 dB噪声不影响保护正确动作,本文保护原理具有一定的抗干扰能力。
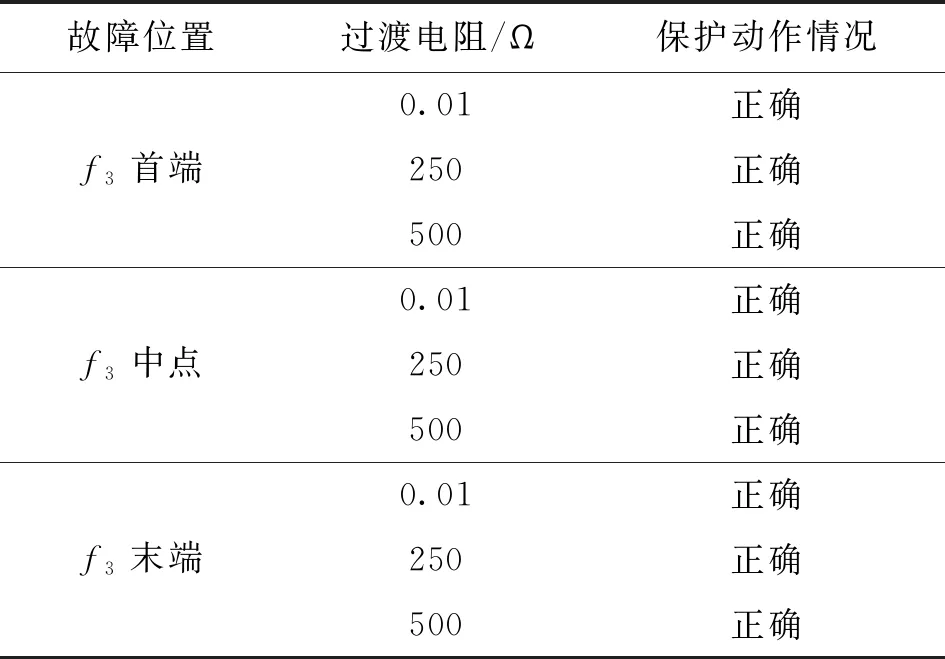
表7 抗干扰性能仿真结果
6 结 论
(1)分析了换流器的控制器在交直流系统发生故障时的响应特性,以整流器定电流控制信号、逆变器定电流控制信号和逆变器定熄弧角控制信号作为特征量,构建了适用于保护直流线路的保护方案。
(2)根据高压直流系统的实际控制策略,将逆变器控制所包含的定电流控制和定熄弧角控制展开分析,充分考虑了故障后换流器的调节作用,本文保护原理可以在故障后换流器调节阶段投入,提升了现有电流差动保护的速动性。
(3)仿真验证结果表明,对于区外故障、区内不同距离故障、区内不同过渡电阻故障,本文保护原理均能够快速、准确动作,耐过渡电阻能力强。