波浪滑翔器声学应用分析
2021-05-10杨志国刘保华董武文
杨志国,姜 莹,刘保华,宗 乐,颜 曦,董武文
(1. 国家深海基地管理中心,山东青岛,266237;2. 自然资源部第一海洋研究所,山东青岛266061;3. 青岛海洋科学与技术试点国家实验室,山东青岛266237;4. 杭州锐讯科技有限公司,浙江杭州310000)
0 引 言
近年来,随着海洋技术的不断发展,海洋无人自主移动平台取得了显著的进步,比较典型的有自主水下航行器(Autonomous Underwater Vehicle,AUV)、水下滑翔机(Underwater Glider)和波浪滑翔器(Wave Glider)。这三种平台搭载声学设备进行水下目标监测与探测已经有了比较多的应用[1-3]。通常,自主水下航行器具备推进系统,机动能力强,搭载导航设备后轨迹控制精度高,可搭载声学测绘、探测等设备进行水下地形、地貌扫测以及海底掩埋目标探测等,但是受能量限制无法长时间运行。水下滑翔机通过改变油囊排水量实现上浮与下潜,通过改变翼板的姿态调整前进方向。由于水下滑翔机通常不开启螺旋桨推进系统,其轨迹控制精度较差,但系统功耗低,可以在海洋中长时间生存,适合搭载声学记录仪、声学目标监测系统等对海洋环境噪声进行长期观测以及水下目标探测。波浪滑翔器是一型利用其特殊双体结构转换波浪起伏为前向动力的无人自主水面船,而且水面船体安装有太阳能电池板,可以利用太阳能发电。波浪滑翔器具有自动导航、位置保持和卫通监控等功能,该平台搭载卫星通信模块,可以实现与岸站实时通信,同时可以为负载提供持续的电源供给,适合搭载声学检测系统开展水下目标长期在线监测。多套搭载声学检测设备的波浪滑翔器利用卫星通信等无线远距离通信模块可以实现组网运行,从而可以组成大规模接收阵列提高水下目标检测的几率。
不同的平台由于自身机械结构以及控制系统的不同,呈现的平台噪声特性也不同,本文针对波浪滑翔器搭载声学设备开展声学应用的需求设计了波浪滑翔器平台声学特性分析试验,通过搭载自容式声学记录仪测量波浪滑翔器平台噪声,在青岛近海开展了海上试验。根据海上试验数据对平台噪声进行了分析,给出了平台噪声特性以及平台优化建议。在此基础上,设计了波浪滑翔器搭载声学负载的拖曳结构。
1 波浪滑翔器声学应用
1.1 波浪滑翔器组成与工作原理
波浪滑翔器是近年来海洋环境监测技术领域出现的新型海洋自主观测平台。该平台完全利用环境能源,可以在广阔的海洋上进行长期的路径跟踪和位置保持,并通过卫星通讯将搭载传感器测量的环境数据实时传达给监控基站,基站可视化显示平台状态和测量数据,并可基于矢量地图完成平台的路径规划等。
波浪滑翔器包括水面船体和水下牵引机,二者通过 4~7 m柔性吊缆连接。主控系统安装在水面船体中,太阳能电池板和通讯导航设备安装在水面船体上;水下牵引机由主框架和水翼组成,其尾部设置有舵机转向机构,结构组成如图1所示。
波浪滑翔器在海洋表面与起伏波浪相互作用而实现前向运动,整个过程中柔性通讯缆与系带缆时而张紧、时而松弛。水面船体随着波浪升高时柔性缆张紧,水下牵引机在水面船的拉升力作用下向上并向前产生位移;水面船体随波浪下降时柔性缆松弛,水下牵引机在自身重力作用下下潜,在翼板的推动下向前滑翔[4]。波浪滑翔机运动过程如图 2所示。
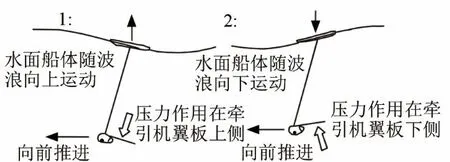
图2 波浪滑翔机运动过程[4]Fig.2 The operational principles of wave glider[4]
本文选用“黑珍珠”小型波浪滑翔器搭载LoPAS自容式声学记录仪开展平台噪声分析和近海噪声监测,该小型波浪滑翔器指标参数如表1所示。

表1 “黑珍珠”小型波浪滑翔器指标参数Table 1“Black Pearl”wave glider specifications
1.2 噪声测量设备
为评估波浪滑翔器搭载声学系统的可行性,利用波浪滑翔器搭载 LoPAS低噪声自容式水听器进行平台自噪声测量。自容式声学记录仪参数如表 2所示。

表2 自容式水听器技术参数Table 2 Self-contained hydrophone specifications
在试验前首先对自容式声学记录仪与水听器进行了室内测试,自容式声学记录仪配置柱状水听器,水听器灵敏度为(−200±2)dB re 1V/µPa(20~40 kHz)。利用图3(a)所示真空罐对水听器与记录仪本底噪声进行了测量。本底噪声测量时首先将自容式声学记录仪与水听器连接好后,配置好工作参数,然后将自容式声学记录仪与水听器放置在真空罐内部支架上,保证水听器与真空罐周围无接触,处于悬空状态,避免低频振动噪声影响(此处为便于安装,只将自容式水听器电路部分与水听器悬挂固定在真空罐内)。为了避免电磁干扰,将水听器用锡箔纸包裹,处于全屏蔽状态,如图3(b)所示。安装好后通过真空泵将真空罐内空气抽出,真空泵可以达到的真空度相对压力为−98 kPa,真空泵达到工作极限后自动停止,真空罐处于保压状态,此时达到中度真空。记录保压过程时间,测量完成后读取保压过程的数据作为测量结果。

图3 真空罐与自容式水听器电路Fig.3 Vacuum container and circuit board of self-contained hydrophone
测量过程中声学记录仪相关参数设置如表3所示,真空罐测量获得的设备本底噪声与0级海况[5]对比曲线如图4所示。从图4中可以看出声学记录仪在测量频带内系统噪声低于0级海况噪声,在 10 kHz附近接近0级海况噪声。

表3 声学记录仪工作参数配置Table 3 Configurations of self-contained hydrophone
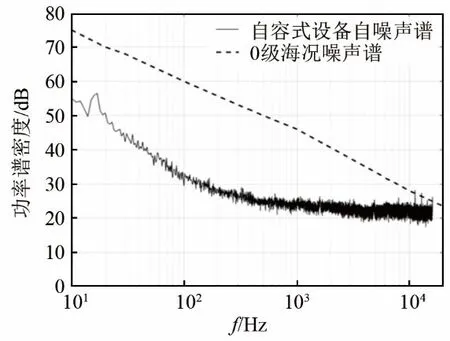
图4 自容式水听器的本底噪声功率谱Fig.4 Background noise spectrum of self-contained hydrophone
1.3 拖曳试验设计
为测量波浪滑翔器平台噪声,将自容式声学记录仪与水听器放置在与波浪滑翔器水下牵引机同样深度,由波浪滑翔器水面船体拖曳,拖曳结构如图 5所示。自容式记录仪与水听器悬挂在浮体下5 m位置,通过配重保持垂直姿态,浮体位于水面船体后7 m距离,由水面船体拖曳前进。

图5 拖曳试验实施示意图Fig.5 Schematic illustration of the towing experiment implementation
2 试验数据分析
2.1 海上试验
本次试验海域为青岛外海千里岩附近。2018年 8月 28日试验船从崂山仰口码头出发,到达60 km外的目标海域布放波浪滑翔器。波浪滑翔器的布放位置以及布放后状态如图6与图7所示。

图6 波浪滑翔器布放位置Fig.6 Deployed location of wave glider

图7 波浪滑翔器布放后状态Fig.7 Deployed wave glider
布放完成后,布放船离开测量海域,波浪滑翔器控制岸站通过监控系统监控并存储铱星回传的数据,分析平台的运行状态。通过铱星回传的数据包括:电子罗盘数据、AirMAR气象传感器数据、温盐传感器数据等。在整个试验过程中实时检测波浪滑翔器工作正常,试验持续到2018年8月29日18:31,波浪滑翔器在千里岩东北侧完成观测任务。此次海试28 h累计航程为81.736 5 km。
2.2 数据分析
在波浪滑翔器布放、回收以及跟踪监测状态的过程中,布放船舶的噪声较大。从8月29日11:48开始船舶噪声消失,所测量信号为波浪滑翔器本体噪声以及环境噪声,有效数据到8月29日17:30,共342 min。
波浪滑翔器搭载的自容式声学记录仪采集的数据为原始数据,数据格式为*.bin。本文首先对数据进行了预处理与分类,将数据转换为*.wav文件后,利用Adobe Audition软件对数据进行回放,在回放过程中通过人耳鉴别结合信号时频图对信号进行初步分类,本文将采集到的信号分为四类:环境噪声、平台结构噪声、水听器安装结构噪声与动物声信号。对分类后的信号利用Matlab软件进一步详细分析其功率谱密度以及时频特性。分析功率谱密度时采用512点傅里叶变换,滑动窗口同样为512点,50%重叠。计算时频特性时根据时间和频率分辨力折中调整短时傅里叶点数。
2.2.1 环境噪声
本次试验海域位于近海,试验过程中记录到的虾类信号比较多,虾类信号几乎存在于整个观测过程。在布放船舶离开波浪滑翔器后,等船舶发动机噪声消失后,选取一段无明显动物声信号以及其他干扰的数据作为环境噪声,计算观测海域的环境噪声功率谱密度。根据波浪滑翔器搭载的气象观测设备记录,观测期间风向集中于西南,风速均值为6.4 m·s-1,约为 3级海况。实测环境噪声谱如图 8所示,由图8可见,中低频噪声较高,在300 Hz~2 kHz频段范围内存在一定的起伏,这个频段主要包括风成噪声等[5]。
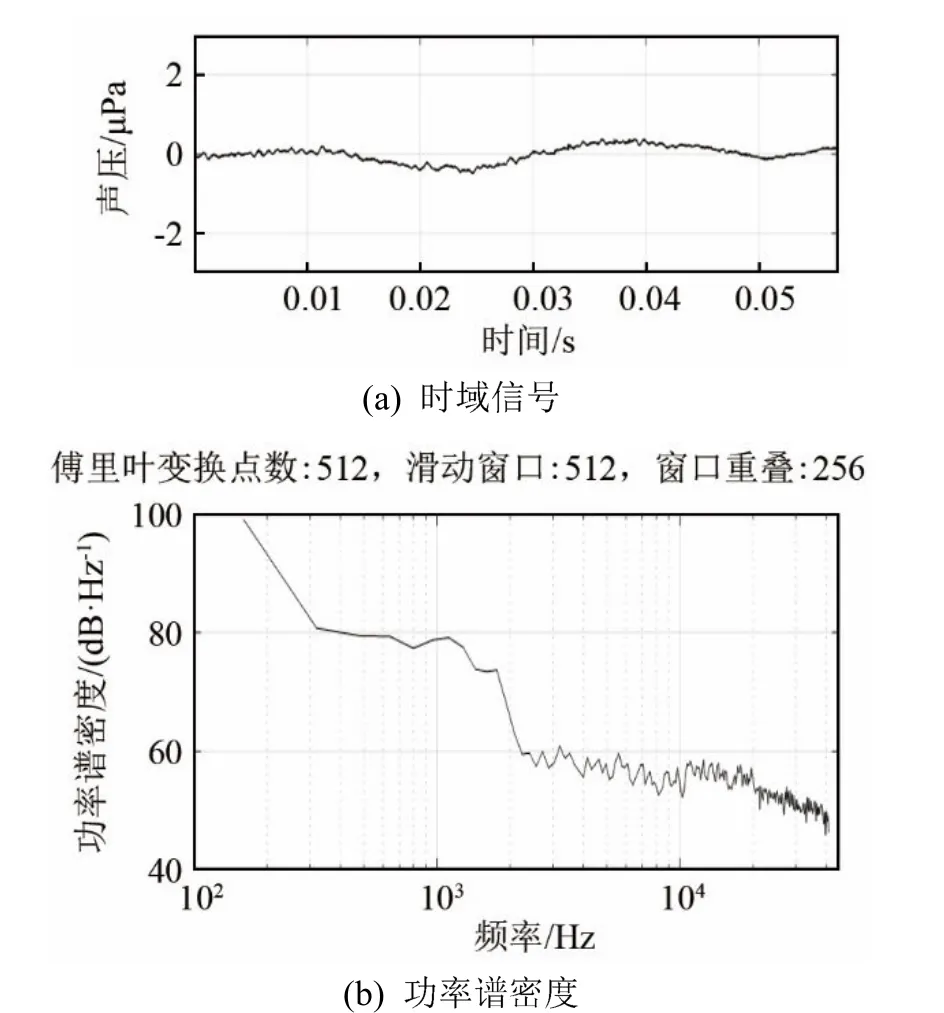
图8 环境噪声时域信号与功率谱密度Fig.8 Waveform and power spectrum of ambient noise
2.2.2 平台结构噪声
波浪滑翔器依靠水下牵引机随波浪的起伏产生前进动力。水面船体随着波浪升高时柔性缆张紧,水下牵引机在水面船的拉升力作用下向上并向前产生位移;水面船体随波浪下降时柔性缆松弛,水下牵引机在自身重力作用下下潜,在翼板的推动下向前运动。翼板依靠弹簧实现回弹,翼板转动结构如图9所示。
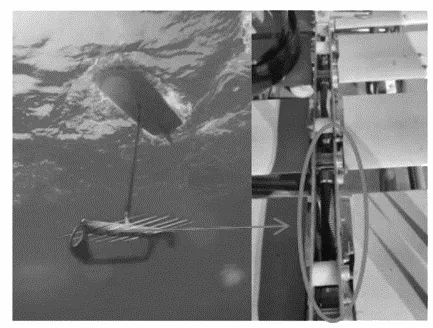
图9 翼板转动结构Fig.9 Wing rotation structure of wave glider
在这一过程中弹簧存在拉伸与回弹过程,弹簧在这一过程中弹簧存在拉伸与回弹过程,弹簧的机械拉伸与回弹产生如图10所示的宽带噪声,信号带宽覆盖2~40 kHz。通过在空气中转动翼板再让翼板自由回弹,记录这一过程产生的噪声,对比发现空气中翼板转动偶尔产生的噪声与水下记录的此类噪声存在类似的频谱特征。

图10 翼板转动噪声波形与功率谱Fig.10 Waveform and power spectrum of the noise caused by wing rotation
在水面船体上下起伏的过程中,系带缆会出现拉紧与松弛两个过程。波浪滑翔器系带缆外部为橡胶层,系带缆与水面船体以及水下牵引机连接部分采用金属部件,如图 11所示。系带缆与金属结构在拉紧以及转动过程中会产生类似“门轴转动”的噪声,噪声在时频谱上表现为“上扫频”以及“下扫频”,存在明显谐波结构,如图12所示。

图11 橡胶系带缆与船体及水下牵引机的连接Fig.11 Connection of ribbon cable to hull and underwater tractor
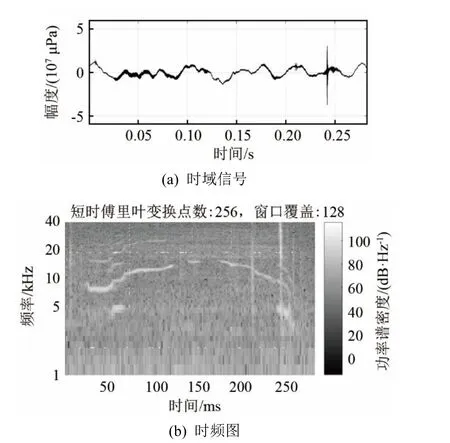
图12 系带缆拉扯信号与时频图Fig.12 Waveform and spectrogram of the noise caused by ribbon cable stretching
2.2.3 水听器安装噪声
水听器在水下受水流冲击会引起振荡,引入噪声。目前,国内应用较为广泛的减震做法是采用如图 13所示的框架加弹簧的结构安装水听器,外部再采用绒布等棉质或丝质布料覆盖,从而达到降低流噪声以及减震的作用。但是,波浪滑翔器搭载采用这种结构安装的水听器时,水听器会随着水面浮体上下起伏而一起起伏,在这一过程中当框架受到冲击的时候弹簧会出现持续高频震荡与低频震荡。高频震荡时弹簧会产生宽带噪声,如图 14所示。高频噪声覆盖整个频带,高频震荡多出现在水听器受到纵向冲击时;低频震荡主要由水听器受到横向震荡引起,震荡时间持续较长,能量主要集中在1 kHz以内,如图15所示。

图13 水听器安装结构Fig.13 Installation frame of hydrophone
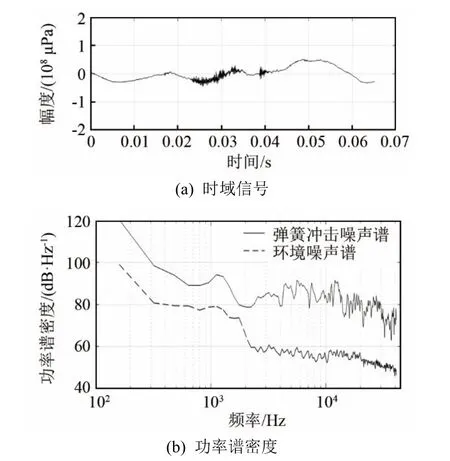
图14 弹簧被纵向冲击产生的噪声波形与功率谱Fig.14 Waveform and power spectrum of the noise caused by hitting frame vertically
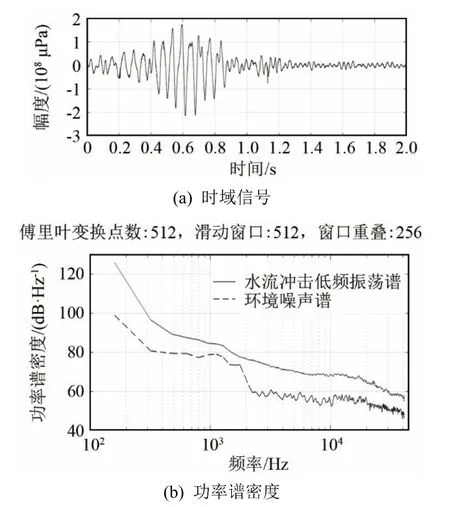
图15 水流等引起的噪声波形与功率谱Fig.15 Waveform and power spectrum of the noise caused by water flow
2.2.4 动物声信号
选取一段明显的虾类信号,如图 16所示,大部分虾类信号后约 5~8 ms均伴随着另外一个信号。结合图5所示拖曳结构,水听器位于水面以下5 m 左右,随波浪以及拖曳存在一定起伏,信号从不同角度到达水听器后再经过水面反射回到水听器,与信号到达时间差吻合。此外,伴随信号相位与直达信号相反,因此判定伴随信号为水面反射信号。对信号功率谱分析如图 16所示,虾类信号为宽带信号,在2~30 kHz均存在较强的能量,不同地区的虾类信号存在一定差异[6]。


图16 虾类的噪声信号与功率谱Fig.16 Waveform and power spectrum of shrimp noise
在试验过程中记录到部分哺乳动物声信号,由于虾类信号的存在以及采样频率的限制导致哺乳动物的click信号较难分辨;而whistle结构较为清晰,在一定的背景干扰下仍然可以分辨。部分疑似海洋哺乳动物whistle信号如图17所示,包括中高频谐波结构的信号,高频上扫频和下扫频以及“V”型结构信号。公开资料显示,近年来我国没有在青岛近海开展过哺乳动物生态现状调查。早期文献显示,在青岛近海可能存在瓶鼻海豚(Tursiopstruncatus)、伪虎鲸(Pseudorcacrassidens)、虎鲸(Orcinus orca)、江豚(Neophocaenaphocaenoides)、抹香鲸(Physetermacrocephalus)、侏儒抹香鲸(Kogiasima)、柏氏中喙鲸(Mesoplodondensirostris)[7]。由于在试验过程中仅采用了自容式声学设备记录,波浪滑翔器工作时间段内没有视频记录数据,通过对试验数据分析并与文献结果对比,初步推测中频whistle信号可能为伪虎鲸信号,伪虎鲸whistle信号主要能量集中在4~6 kHz之间[8],与本次试验观测结果接近。进一步识别更多海洋哺乳动物信号需要进一步开展视频和音频同步观测,获取更多数据。

图17 可疑海洋哺乳动物声信号时频图Fig.17 Spectrograms of some potential marine mammal signals
2.3 机械噪声消除及声学负载拖曳方案
根据试验结果需要对波浪滑翔器本体噪声进行控制,包括优化翼板弹簧结构、改进系带缆与水面船体以及水下牵引机连接处之间的结构。对于声学负载而言,将图 14所示水听器固定结构中的弹簧改为耐腐蚀橡胶,消除弹簧共振引起的噪声,如图18所示。

图18 水听器隔振安装结构Fig.18 Installation of hydrophone: a protective cage with suspension
此外,声学拖曳负载拖曳方式需要采用多级缓冲结构,如图19所示,拖曳负载通过配置合适的浮子与重块保持零浮力,与水下牵引机之间采用由重块与浮子组成的多级横向“S”型结构缓冲。缓冲结构可以有效消除波浪滑翔器前进过程的不连续导致的低频拖曳振动噪声。

图19 声学负载拖曳示意图Fig.19 Towing structure for acoustic payload
根据图11与图13所示,目前平台弹簧噪声与系带缆拉扯产生的噪声谱比环境噪声谱高出最多33 dB。此处仅考虑传播损失因素,不考虑吸收因素,按照球面波扩展计算,采用目前平台在近海开展水下目标检测时声学负载拖曳距离至少需远离翼板50 m以上,才可以保证不受平台噪声影响。
3 结 论
波浪滑翔器作为一种新型海洋无人自主航行器,与AUV以及水下滑翔机相比有其独特的优势。波浪滑翔器不受能源限制,通过利用波浪能源与太阳能搭载观测设备实现长期观测。本文利用波浪滑翔机搭载低噪声自容式水听器对波浪滑翔机本体噪声进行了评估,分析了波浪滑翔器本体噪声以及水听器安装引入的噪声产生机制,并提出了改进方案;试验过程中记录到虾类与海洋哺乳动物信号,验证了波浪滑翔机搭载声学设备开展声学观测的可行性。结合波浪滑翔器跨界面自主运行的优势,可以通过卫星通信或其他远距离无线通信方式将水下观测或探测结果实时传回到远距离陆基或船基控制平台,再配合同步数据采集可实现水下、水面多节点实时组网。此外,波浪滑翔器具备航迹规划能力,具备一定的航迹控制精度,搭载声学探测装备的波浪滑翔器在海上可以按照预定轨迹在海上组成一定的阵型,从而可以提高水下目标检测能力,可以用于水下发声目标实时监测、探测等。
