面向应急常态化的卫星任务管控模式研究
2021-05-08刘晓丽宋世杰
付 伟,刘晓丽,宋世杰,张 超
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.北京跟踪与通信技术研究所,北京 100094)
0 引言
卫星任务管控系统是航天地面系统业务运行的核心,主要负责根据上级指令和卫星观测任务需求,完成观测任务规划、卫星计划制定、卫星有效载荷控制、数据接收计划调度及卫星系统工作状态监视等。任务管控系统涉及对卫星资源、地面站接收资源、测控资源的统一优化调度管理。随着我国航天事业的发展,已经建立了适用于常规普查任务的地面任务管控系统[1-2]。
随着卫星技术的不断发展和用户对遥感需求的不断提高,对地观测卫星在战争、地震、火山爆发和森林火灾等应急事件中扮演着越来越重要的角色,成为获取信息的重要手段。实际观测过程中,高动态、高时效任务即时产生,即任务必须在规定期限内完成,否则将会丧失观测价值,使得传统的固定周期静态规划难以及时处理卫星应急调度问题,对现有运行机制提出了挑战,应急响应常态化将成为一种趋势[3-6]。然而,原来针对常规普查任务的管控流程和任务规划算法[7],在面对突发事件紧急调整任务时,应急任务插入可能会影响到24 h的星上任务执行,任务调整复杂、涉及范围广、风险大,无法应付应急常态化值班,需要为应急任务设计特别算法,如层次网络算法[8]、滚动任务规划算法[9]。
另一方面,随着地面系统的增量式建设,在轨运行卫星数量大幅增长,任务量大幅增长,任务调整影响的卫星任务将成倍增长,牵扯的任务、资源等关联关系更加错综复杂,应急任务调整不但影响地面系统计划的取消与调整,而且要涉及到卫星指令的取消与调整,应急调整影响范围较广,风险很大。
针对现有的面向常规任务的值班流程,进行任务管控运行模式变革,结合面向应急任务触发的应急快速动态调整模式,提出了事件触发的滚动式动态任务管控新模式。在此基础上提出了适用于滚动管控模式的任务规划算法以及业务流程的控制策略,有效提升卫星管控自动化水平。
1 基于事件触发的滚动式任务管控模式
常规任务管控模式下,观测任务是分时段、分批次到达的,任务管控系统按照固定周期(通常为一天)提前执行任务规划、计划制定和指令编制,当测控时机到达前发送指令并将该时段指令统一上注。在常规运行模式下,任务管控系统前后2次任务规划、计划制定和指令编制的任务时段在时间上互不交叠,因此每次上注的指令不会影响星上已有动作指令的执行。
随着航天应用的发展,特别是用户的不断增多,针对强时效性要求的观测需求,从数量和要求上都有了极大的提高。另一方面,测控资源充足的情况下,可通过缩短任务规划时间周期,实现任务指令的及时上注及安排,以便快速纳入应急流程,缩短任务地面调整时间,尽量规避星上任务频繁调整的复杂性与高风险。
应急常态化下的卫星观测任务以动态方式不断到达系统。为满足任务的时效性需求,任务管控系统需要通过多次规划完成所有任务的规划。针对应急任务具有动态变化性和快速保障的特点,提出基于事件触发的滚动优化策略的动态规划方法。该方法以滚动推进的形式选择任务进行规划,可及时调整任务规划方案以适应和跟踪系统状态的变化,因此能够有效应对任务动态到达对系统负载的影响。
基于事件触发,主要指在出现使系统状态发生改变的事件,或在受到人工干预时开始执行规划,例如有紧急任务到达、卫星状态发生变化、测控资源状态发生变化、决策部门提出规划需求等情况发生时,触发任务管控各个节点流程的启动。
不同于常规任务分时段、分批次的到达模式,滚动式任务管控模式针对当前任务到达时间分布、测控资源保障机制和卫星使用特点,任务管控系统对任务规划与计划指令编制操作的时间周期重新定义,采用多节点流程异步滚动模式,如图1所示。

图1 异步滚动管控模式Fig.1 Asynchronous rolling control mode
任务规划以天为周期进行多次滚动式规划,完成一次任务规划后,当有新任务到达且执行时间距离测控时刻较近时,立即启动下一轮任务规划。按照任务动态情况与测控资源保障情况一天可执行多轮任务规划,每一轮任务规划时间周期都是交叠的,时间逐步推进的。
计划编制、指令编制与任务规划的周期不同,按照测控时间周期切分为多次执行。一轮任务规划完成后立即启动一轮计划编制,从长周期任务规划方案中按照测控时机截取2次测控时机之间的数据进行计划编制,计划编制完成后立即进行指令编制,指令编制与计划编制的周期完全同步,通过流程调度自动切换运行。一天根据任务规划次数需要上注多次指令,每次的指令块中不需要进行星上指令取消。
异步滚动模式避免了星上指令的频繁取消,无运行风险,给各地面站的跟踪接收计划也不需要经常取消,不影响其他系统值班工作。由于任务规划时间交叠,任务规划方案数据存在大量取消情况,数据冗余且状态需要进行有效维护,以保证数据的一致性。但是任务规划按天为周期,可保证任务与资源安排的优化性。由于计划、指令与任务规划时间周期不同步,若测控时机很多,且密集时,计划与指令的滚动周期切分策略不好确定。若测控时机较少,指令上注周期较长时,也会存在临时申请应急测控,取消星上指令重新注入新指令的情况。
2 滚动式任务规划优化策略
从观测任务是否完成回放角度来看,任务规划有2种优化策略:完全回放和部分回放。常规任务规划采用完全回放策略,一般按天进行一批次任务规划,因此在一次任务规划过程中首动作安排固存清除,从头开始记录任务,任务规划周期内将所有安排的观测任务全部安排数据下传,卫星姿态复位,一次任务规划与下一次任务规划之间相对独立,业务值班交接简单。
不同于常规任务规划方式,基于事件触发的滚动式管控任务规划周期不固定,任务规划区间内星上存储与平台姿态等不进行强制复位,因此每轮任务规划之间并不是独立的,本次任务规划与前一次、后一次任务规划之间存在星地资源使用的关联关系,即前一次任务规划结束后的星地资源使用状态会影响后一次任务规划的决策。因此需要重新设计滚动式任务规划策略以适应新的管控系统[3]。
滚动式任务规划将原来以天为单位的长周期任务规划问题划分为若干个子阶段的任务规划过程,选择一天可用的多个业务测控时机,进行多次任务规划,每个阶段任务规划称为一个子任务规划[10-11]。每次子任务规划需要根据上一次规划的结果导出当前的星地状态作为本阶段任务规划的输入,如固存剩余容量、卫星能源和平台姿动状态等,星上未回放任务需要与本阶段需执行的任务统一考虑,即在本轮任务安排尽量饱满的情况下尽可能安排上一次未回放任务进行数传。因此滚动式模式下任务规划的求解可以看作多轮子任务规划之间的状态转移过程。
在滚动式管控模式下,极限情况下可将测控时间间隔作为一次任务规划区间,此时,每一个测控时机就成为任务规划的触发事件。以测控时间段为任务规划区间虽然可以提高卫星对应急任务的保障能力,但是,由于受卫星测控资源的限制,目前卫星2次测控时间间隔一般在小时级,随着动态任务下达的随机性提高,不可预知未来观测任务的分布情况。另一方面,由于卫星受固存与回放资源的限制,如果任务规划时完全不考虑后续回放资源,有可能出现前面规划的观测任务无法进行数据下传,或者前面规划的任务太多导致后面无法安排其他任务。所以,为了避免上述情况,每次任务规划时必须适度前瞻以便充分考虑回放资源。异步滚动管控模式下,每轮任务规划虽然触发时机不同,但每次均以触发事件可用测控时机之后的一天为固定区间对任务进行优化,采用观测任务完全回放策略,从而保证了方案的优化性。每一轮任务规划过程中采用的优化搜索算法、优化策略以及各星的约束处理功能等,与原先的任务规划没有太大不同,仍然可以复用原先的方法[8-9,12-13],也可根据需要进行调整。
3 滚动式任务管控的调度流程
在异步滚动式任务管控模式下,任务规划、计划制定与指令编制环节的触发条件发生变化,各个环节所包含的任务周期也有所不同。因此需要在深入分析地面任务管控、遥控指令上注、星上指令执行时序逻辑的基础上,设计基于事件触发的滚动式业务调度流程。
为描述方便,下面定义几个与任务规划调度紧密相关的时间变量。
ΔT:定义为规划开始时刻与最早任务执行时刻的最小时间间隔。主要组成包括:规划用时、计划编制用时、指令编制用时、指令发控用时、指令上注准备用时、指令上注用时和指令上注后解包用时。
Δτ:定义为规划开始时刻与选用的测控时刻的最小时间间隔。主要组成包括:规划用时、计划编制用时、指令编制用时、指令发控用时和指令上注准备用时。
Δt:定义为测控时刻与任务执行时刻的最小时间间隔。主要组成包括:指令上注用时、指令上注后解包用时。
T0:定义为当前时刻。
Te:定义为最早任务执行时刻。
TC:定义为选用的测控时刻。
时间定义示意如图2所示。
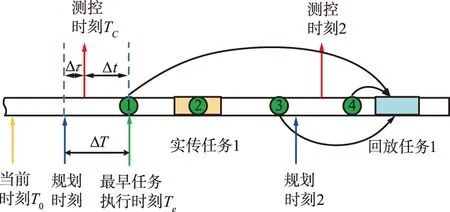
图2 时间定义示意Fig.2 Time definition diagram
滚动式动态管控自动调度流程如图3所示。
① 实时监视观测任务状态,形成未规划观测任务列表,实时更新当前时刻T0;
② 获取观测任务最早执行时刻Te,选择最佳的测控时机Tc;
③ 分析观测任务受理处理、自主任务补充调度时机:
根据预先配置,在Tc-Δτ前某一时刻进行观测任务受理处理、自主任务补充调度;
④ 分析任务规划调度时机
判断Te-T0<ΔT是否成立,若成立,则转步骤⑤;否则返回①,继续等待新任务到来,并更新T0;
⑤ 调度任务规划开始执行;
⑥ 任务规划完成后,返回完成通知,调度计划编制开始执行;
⑦ 计划编制完成后,返回完成通知,调度指令编制开始执行;
⑧ 分析指令发控调度时机
根据测控时机和指令发控用时、指令上注准备用时等参数设置,计算指令发控调度时机,调度指令发控将指令发送给测控系统;
⑨ 接收计划发布调度时机
根据接收计划执行时间、接收计划下发用时、接收站接收准备用时等参数,计算接收计划发布调度时机,调度接收计划发布将跟踪接收计划发送给各接收站;
⑩ 返回步骤①,进行下一轮规划调度。
需要说明的是,当发现任务执行时间已近而触发了任务规划节点时,还要判断是否存在合适的测控资源。若无合适的测控资源,需立即触发测控资源申请的子流程以保障该任务的正常执行,若申请失败则该观测任务被舍弃。

图3 滚动式管控自动调度流程Fig.3 Automatic scheduling process of rolling control
4 结束语
基于事件触发的滚动式任务管控模式打破了日值班周期批处理任务的管控模式,将常规任务流程与应急响应流程有机结合在同一个框架,通过各节点流程调度控制,可实现任务管控的高度自动化,满足应急任务常态下对任务管控系统高时效性要求。同时,滚动式任务管控模式及流程同样适用于现有系统的分层规划架构,在测控接收资源统一协调调度的基础上,能够实现单星任务管控分布式运行,现有运行系统影响较小,对新型号任务管控系统的建设有积极的借鉴意义。
