UUV应急处理策略构建推理研究
2021-05-08张宝贵
张宝贵,周 俊
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水下无人航行器(underwater unmanned vehicle,UUV)由于其隐蔽性、智能性和经济性等诸多优点,在科研试验、海底勘察和水下无人作战等领域的应用受到高度重视,推动了UUV的快速发展[1]。UUV作为无人平台,考虑其任务执行的安全性、延续性和时效性,系统应急处理能力的优略是衡量UUV的综合性能关键要素[2-4]。目前,国内对UUV的工程化研究比较深入的仅限少数几家研制单位,大多数UUV的应急处理策略比较简单。本文将UUV应急处理决策关联UUV系统故障测试及诊断,利用故障模式分析,结合领域专业推理和诊断是决定UUV应急处理决策的有效方法,这种方法在航天领域有比较成熟的应用[5-6]。
1 UUV应急处理策略概述
UUV应急处理策略与 UUV用途和任务紧密关联,UUV执行不同任务时响应不同的应急策略。UUV应急处理策略构建一般包含应急情况确定、应急等级划分、应急情况判断及应急处理响应等内容。
1.1 应急情况确定
UUV的任务流程主要包括布放,自主航行,执行任务,回收等主要环节。在整个任务流程中,各环节均可能出现各种类型的应急情况。因此,UUV应急处理策略的构建基础是系统应急情况确定,系统应急情况一般结合UUV任务流程和UUV故障模式综合分析来确定。
1.2 应急情况等级划分
不同的UUV应急情况对UUV任务最终完成有不同程度影响。在应急处理策略构建时,需要梳理UUV任务流程确定UUV应急等级。UUV应急等级划分基本原则是按影响UUV最终任务完成情况的严重程度,由高到低确定,其中1级最高,1级应急情况将导致任务终止。其他应急情况可根据影响任务完成情况后果程度酌情确认。
1.3 应急情况判断
UUV应急处理策略中比较关键的内容是应急情况判断,一套比较完善的UUV应急情况判断体系需结合UUV系统状态测试以及UUV故障诊断。UUV系统状态测试除了对 UUV系统自身功能部件的功能性能测试外,还应包含UUV对外部关键因素的测试,如深度、高度等测试信息。UUV故障诊断主要是结合故障模式、系统状态测试和故障影响建立故障诊断方案。
1.4 应急处理响应
目前,大多数UUV的应急处理响应主要集中在安全应急措施上,对于应急情况处理逻辑框架的研究相对较弱。UUV应急处理逻辑框架需综合应急响应部件的功能特性、故障诊断和应急情况等级等方面的信息后系统搭建。其中,当UUV同时检测到多个应急情况且有冲突时,按优先级别高的应急情况对应的措施进行处理。
2 分布式UUV应急处理策略系统构架
UUV应急处理策略推理技术是综合 UUV系统状态测试、故障测试诊断以及应急处理响应等多方面的系统工程。UUV作为无人系统,海量测试信息是实现推理诊断精确性和应急处理有效性的前提条件,但海量测试信息的处理分析和诊断会影响故障诊断实时性,因此,构建合理的推理诊断系统构架,分层分级处理测试任务和测试信息[8],才能实现推理诊断的精确性和应急处理的实时性。
UUV系统集成度高,功能部件间的关联较多,故障模式复杂,测试信息丰富,这对提高推理的精度有较大的帮助,但大量的数据解析和逻辑推理运算降低了系统的时效性。若采用集中式诊断系统,很难实时有效地处理海量测试信息,而分布式诊断系统构架可实现测试信息的分级处理,从组件到子系统进而到系统,由下至上逐级诊断处理,既保证了测试信息的精确处理,又确保了诊断决策和处理的快速性和实时性。
图1为通用UUV诊断系统构架,各功能组件为底层测试点,部分组件具备一定的BIT功能,所有测试点的测试信息通过总线传输至各分系统故障诊断模块,分系统故障诊断模块根据任务和功能要求对测试信息进行筛选和处理,并将结果传输至故障诊断决策系统,故障诊断决策系统负责子系统故障诊断协同、分配和信息融合,提供决策信息,进而采取相应的应急处理措施。
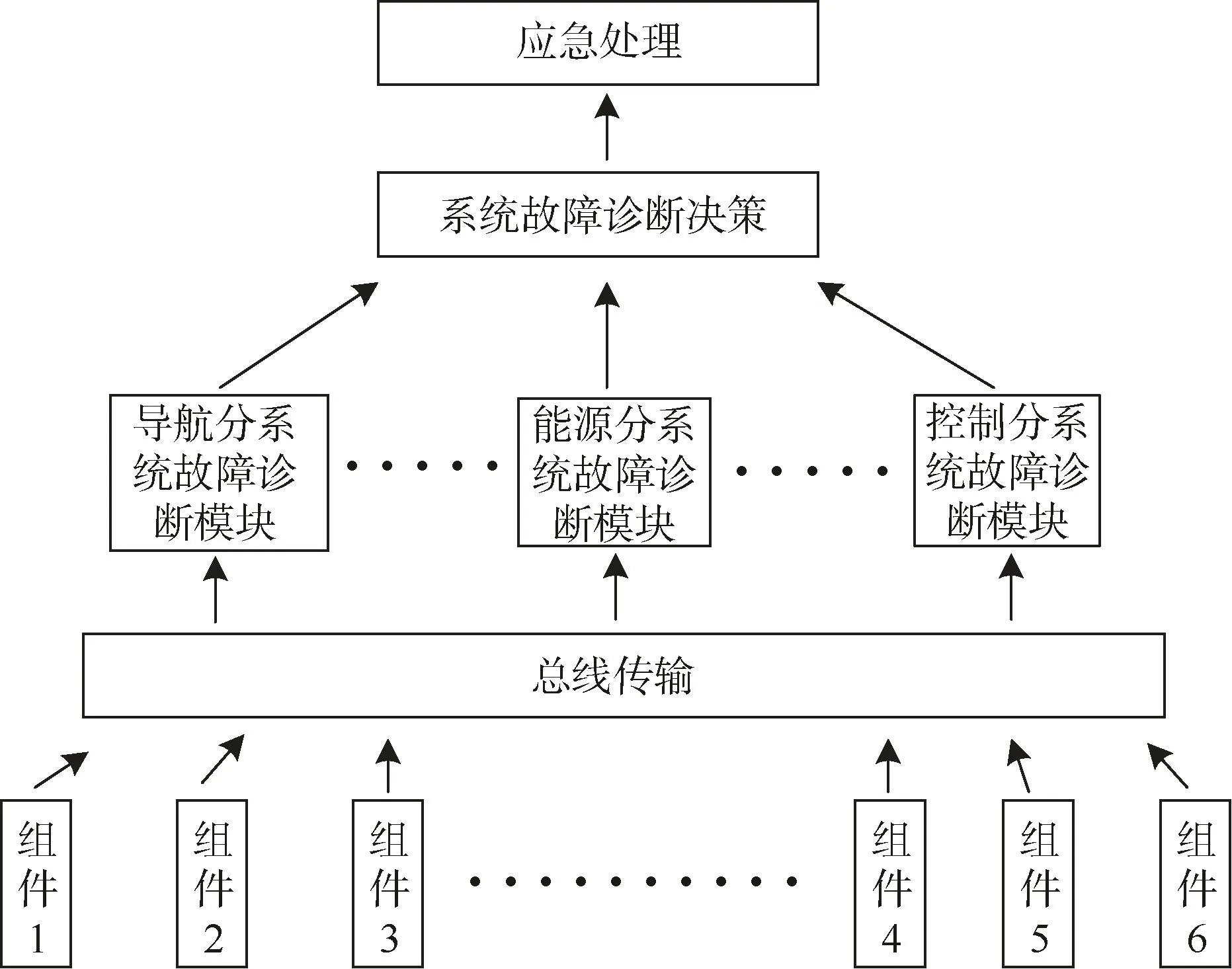
图1 UUV诊断系统构架图Fig.1 Architecture of UUV diagnostic system
分布式UUV诊断系统将故障测试诊断分级分配,避免故障诊断决策系统因复杂故障信息处理过量造成决策滞后,应急处理不及时引起严重后果,又确保了应对复杂故障时测试信息的完整性,提高了UUV系统故障诊断及应急处理能力。
3 UUV分级应急处理推理策略
UUV应急处理程序一般根据 UUV的使命任务和功能来划分,与UUV的故障模式息息相关,故障的严重程度直接决定UUV任务的完成情况。根据 UUV使命任务,将 UUV的故障模式分为 2类:一是严重故障,该类故障的发生可直接导致UUV任务终止;二是其他故障,该类故障发生时,会导致相关功能件功能异常,但不影响UUV最终任务的完成。结合UUV故障模式,同时避免集中式处理带来的资源利用率分布不均造成的时效性问题,将UUV应急处理策略划分为3个等级,由高到低分别为核心功能故障导致无法完成基本任务、由于外界原因导致无法完成基本任务和可完成基本任务但失去部分功能3个等级。
1)第 I级:核心功能故障导致无法完成基本任务。
当UUV核心部件出现功能性故障无法自恢复时,将会导致UUV无法继续执行后续任务,这类故障归为I级应急响应故障现象,UUV优先响应I级应急处理程序。
2)第II级:由于外界测试问题导致无法完成基本任务。
UUV自身无故障出现,到其测试点测试的外界因素异常导致 UUV无法继续有效执行后续任务,这类异常归为II级响应异常现象,UUV响应完I级应急处理程序,处理II级应急响应程序或者无I级应急处理程序需响应时优先处理II应急处理程序。
3)第III级:可完成基本任务但失去部分功能。
UUV出现故障,但不影响 UUV基本任务执行。针对这类故障,UUV对应故障测试点和响应的功能进行相应处理,前提是保证基本任务的执行。III级响应故障的响应等级最低。
根据UUV应急响应等级,由高到低进行深度推理,I级应急响应对应故障单元规模小,推理效率高,可快速准确定位,相对而言III级应急响应对应故障单元规模大,推理时间长,同时会出现一定的不确定性。
4 应急处理推理策略
针对各级应急处理策略,采取面向应急处理策略对应故障的深度推理,基于UUV故障模式分析,建立UUV故障与应急处理策略相对应的应急处理数据库,结合推理方式[7]和UUV应急处理特点进行由高到低的反向推理策略,对同级别应急处理策略进行遍历符合性推理,推理示意图如图2。

图2 应急处理推理策略示意图Fig.2 Schematic diagram of emergency treatment reasoning strategy
当出现单一故障时,分系统分级进行预先处理,系统级故障决断按照遍历推理,可保证推理诊断过程的精确性。当某一故障模式的结论作为其他故障模式的约束条件时,存在遍历推理无法匹配的可能性。针对这一问题,需要进一步进行深度推理,推理原则如下:
1)建立故障库,遍历所有故障模式,当该故障模式不以其他故障模式结论为约束条件或该条件已获得,则匹配该故障模式,匹配成功,响应对应处理流程,若不成功,匹配下一个故障模式。
2)当该故障模式以其他故障模式结论为约束条件,且该条件未获得,则该故障模式应纳入下一次遍历的故障库中,然后退出并匹配下一个故障模式。
通过针对单一故障和复合故障的反向推理和深度推理相结合,建立包含故障与应急处理策略相对应的应急处理数据库,可满足推理的遍历性要求,同时也保证推理过程精确性和严密性。
以某通用型UUV开展的应急处理系统测试为例,21个组件,建立68个故障模式,160个应急处理流程,采用半实物仿真结合实航的方式进行测试,部分测试结果如表1。
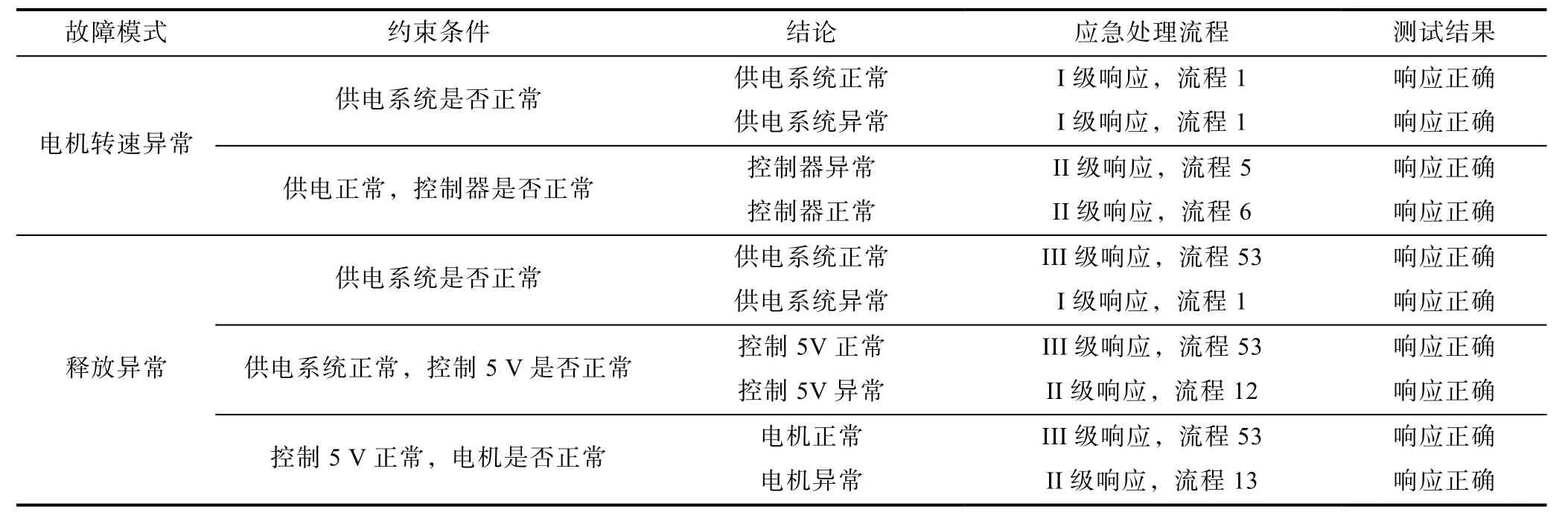
表1 UUV应急处理策略测试情况表Table 1 Test table of UUV emergency treatment strategy
从测试结果来看,应急处理策略推理正常,结论正确。
5 结束语
本文通过对 UUV应急处理策略推理技术的研究,建立了分布式应急处理策略构建,实现快速故障诊断和应急响应。通过基于故障模式的反向推理和深度推理,利用故障分级诊断的推理策略,实现针对不同故障采取响应应急流程,并通过半实物仿真和实航测试,验证了UUV应急策略的正确性,提高了水下无人航行器任务执行的安全性和时效性。
