客舱数字压力控制系统的仿真分析
2021-05-07樊岫云
杨 莉,樊岫云
(上海飞机客户服务有限公司,上海 200241)
0 引言
客舱压力的稳定性是飞机舒适性评价指标之一,也是使飞机结构免受压力交替影响,保障安全飞行的重要举措之一。当飞机从地面起飞爬升进入巡航高度的过程中,十几分钟内飞机舱外的大气压力从一个大气压跌至五分之一个大气压,变化非常剧烈。过低的客舱空气压力,会使人出现高空减压症、胃肠胀气、体液沸腾、肺损伤等症状,严重的情况下会危及生命[1]。
因此,飞机主制造商必须攻克压力控制这一关键核心技术。同时,飞机在巡航状态时,不可能时刻精准地保持在巡航高度上,飞机的飞行高度会发生改变,舱外的压力随之变化。加之飞行过程中发动机压气机的压力波动、舱内温度的变化以及客舱的泄漏等都对客舱压力形成很大的影响。基于参数固定的经典PID压力控制器难以适应复杂多变的内外环境,将客舱内空气的压力保持在规定值或允许范围内。舱内压力的波动,增压、降压过快,会引起压耳现象,造成乘客的听力下降、耳鸣、疲劳等不适,甚至出现头晕、耳痛症状,严重地影响了乘客乘坐的舒适感,也会对飞机结构造成疲劳损伤。因此,在飞机客舱压力控制系统中引入模糊控制,通过模糊推理和模糊运算来实现对客舱压力的准确控制,使飞机在任何飞行高度上都能为机组成员和乘客提供一个安全、健康和舒适的空中环境,同时也保证飞机机体结构的完好,提高飞行安全。
1 客舱压力控制系统
飞机客舱是一个密闭的空间环境,相较于火车车厢、建筑物室内等环境,客舱不仅要对空气温度进行调节,还要对舱内的空气压力进行调节。客舱压力控制系统必须具有正常压力控制和应急压力控制两大功能,其中应急压力控制是为了防止座舱压力系统失灵造成座舱结构的损坏,由正压释压活门和负压释压活门组成,它们不与正常压力控制系统部分相连接,当舱内、外压差超过设定值时,自动打开,平衡舱内外压差。本文重点研究正常压力控制,以下客舱压力控制系统即指正常压力控制系统,主要有气动式,电子气动式和数字式三种形式。先进客机的座舱压力控制已采用数字式,主要由数字式控制器、排气阀门、数字式压力传感器和座舱组成,如图1所示。数字式控制器根据大气飞行数据、飞行员操作信号、飞机飞行状态数据、座舱压力制度及舱内压力实时计算出输出信号至排气阀门,使其驱动阀板偏转,改变排气流量,实现对客舱的压力控制。
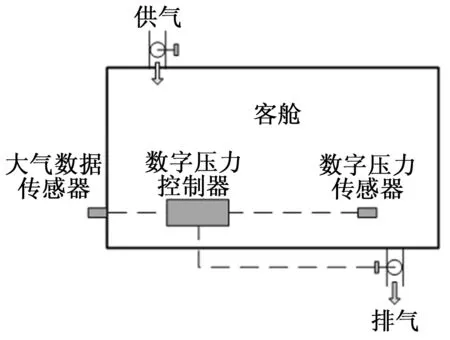
图1 客舱压力控制示意图
1.1 客舱数学模型的建立与简化
在飞机的飞行包线内,客舱内的空气可视为理想气体来处理[2],满足理想气体状态方程:
PcVc=McRTc
(1)
式中,Pc为客舱内气体压力(Pa);Vc为客舱内气体占有的容积(m3);Mc为客舱内气体质量(kg);R为气体常数(J/(kg·K));Tc为密闭舱内气体温度(K)。
客舱温度由专门的温度控制系统进行控制,飞行包线内舱内空气温度变化范围很小,因此,研究座舱压力控制系统时,可把由座舱压力变化引起的空气温度变化忽略不计,以简化系统。此外,忽略舱内设备的体积变化,认为空气充满整个客舱。由气体状态方程(1)可知,客舱压力Pc的变化取决于舱内的空气质量Mc的变化,由式(1)可得:
(2)
正常飞行条件下,客舱压力系统的正压活门和负压活门都处于关闭状态,客舱压力变化主要受供气量Gs(kg/s)、漏气量Gl(kg/s)和排气阀门的排气流量Ge(kg/s)的影响。现代飞机的客舱均采用密闭座舱,因此Gl可忽略。即:
(3)
在稳定状态下,座舱的供气量和排气量相等,即有Gs0=Ge0。
由式(2)和式(3)可得:
(4)
1.2 排气阀门的数学模型
排气阀门是客舱压力控制的主要执行元件,由驱动装置和节流装置两部分组成。驱动装置采用直流无刷电机,节流装置选用蝶阀。直流无刷电机根据数字控制器的输入,通过减速装置驱动阀轴带动阀盘旋转,改变阀门开度面积,从而控制排出的空气质量。根据流体力学原理,将碟阀节流部分看作一个截面面积可变的流管,可推导出气体在绝热、等熵条件下通过截面的流量公式。

(5)
其中:Ge为通过该截面的空气质量;μ为节流损失系数;P、T分别为空气的压力、温度,下标c代表客舱内环境,下标h代表客舱所在高度的外环境;F为流管截面积;R、k为气体常数。对空气而言,R取287,k取1.4,式(3)可表示为:

(6)
对某型客机而言,其巡航高度为10 000 m,根据座舱压力制度,有Ph/Pc≤0.528,由式(6)可得:
(7)
式中,下标0表示平衡点,由式(4)可得:
(8)
(9)

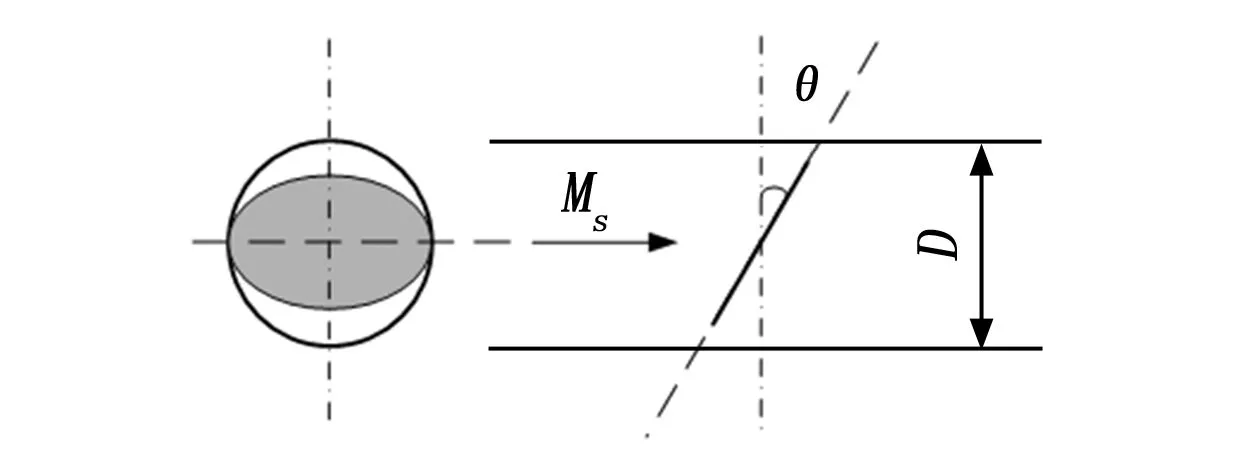
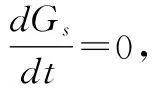
图2 蝶形排气阀流量控制原理

(10)
由于cosθ(t)是余弦函数,非线性,不可采用线性定常系统的方法对F(t)进行分析和设计。在平衡点θ0附近将F(t)线性化,t=t0+Δt,θ=θ0+Δθ,当Δt→0时,有Δθ→0:
(11)

(12)
由此可见,排气量与阀盘转角成等百分比关系,阀盘转角增大,阀门开度增大,排气量增加,舱内压力减小;阀盘转角减小,阀门开度减小,排气量减小,舱内压力增加。因此飞行过程中,排气阀门的开度即阀盘转角决定了客舱内的绝对压力,阀盘的转角速率决定了客舱内压力的变化率。
直流无刷电机的控制电压与其转速之间的关系可用式(13)来简化[3]:
(13)
式中,U(s)为控制电压,ω(s)电机角速度。此外,通过减速装置可得阀门转角θ(s)与电机角速度ω(s)的关系:
(14)
式中,r为减速比。阀门转角与电压的关系为:
(15)
式中,K4=K3r。
因此,客舱压力控制系统的传递函数为:
(16)
式中,K=K1K2K3。
2 数字模糊自适应PID控制器的设计
2.1 PID控制原理
PID控制是线性定常系统常用的一种反馈控制方法,按偏差的比例(P)、积分(I)和微分(D)进行控制,适用于可建立精确数学模型的被控对象,其控制精度高,响应速度快,易于实现。PID控制原理如图3所示,控制器传递函数可表示为:
(17)

图3 PID控制原理图
式中,KP为比例系数,其作用可使输出随输入成比例放大或缩小。增加KP既可使系统响应加速,又可减小稳态误差,但KP过大将导致系统失控。KI为积分常数,只要控制器输入即误差不为零,积分作用将一直持续并累积。过大的KI会延长系统的调节时间,使系统振荡甚至变得不可控。KD为微分常数,将误差的变化率成比例放大或缩小,合适的KD有助于进行超前控制,缩短系统调节时间。但是,当系统中存在干扰信号时,它也将受微分作用的影响,给控制带来不利,使系统的抗干扰能力下降。
2.2 模糊控制原理
模糊控制是一种智能控制,它通过效仿人的控制经验,用模糊语言和隶属度对数学模型不精确的被控对象,采用计算机进行模糊逻辑推理而进行的一种精确控制方法[4]。模糊控制系统由控制器、执行机构、被控对象和传感器等环节构成,其基本结构如图4所示,左侧虚线框内是模糊控制器。
图4 模糊控制系统的基本结构
构建一个模糊控制器须经模糊化、模糊规则库的建立、模糊推理和清晰化4个过程。首先选择合适的论域将精确量转换为离散量,并用模糊语言和隶属度函数来表示,称之为模糊化。模糊语言一般用“高”、“低”、“大”、“小”、“冷”、“热”等模糊词来表示。如一温度数值,其隶属度函数表示该数值接近“很冷”、“冷”、“不冷不热”、“热”和“很热”的程度。常见隶属度函数有三角形、高斯形和梯形等。
其次,效仿人的控制经验,将所要控制的目标变量与控制变量之间的对应关系用一组规则语句来表示,或将其编成规则表,这组控制规则或控制规则表称之为模糊规则库。
然后进行模糊推理,使计算机根据输入信号,如传感器感知值、误差和误差变化率等来模仿人脑的推理过程,在线查询模糊规则库后决策出对应的输出值,一般用“If-Then”语句进行查询。
最后是清晰化,又称反模糊化。先将模糊推理得到的输出值(模糊语言)变换为论域中对应的离散值,即清晰量,再将清晰量经隶属度反变换成精确的连续值。清晰化的方法主要有最大隶属度法、加权平均法和中位数法等。
2.3 数字模糊自适应PID控制器的设计
将模糊控制与经典的PID控制相结合,使控制器既具有模糊控制智能灵活、适应性强的特点,又具有PID调节速度快和控制精度高的优点。飞机客舱数字压力模糊自适应PID控制原理如图5所示,主要由A/D转换器、模糊自适应PID控制器、D/A转换器、排气阀门和客舱段组成。以客舱内空气压力的设定值与本次采样值之偏差e以及偏差变化率ec作为模糊推理的输入量,根据专家经验,通过模糊决策对PID控制的参数进行在线调整,即根据飞行环境的控制要求,在线调整KP、KI和KD的偏差ΔKP、ΔKI和ΔKD,获得模糊自适应PID控制器的输出量为KP0+ΔKP、KI0+ΔKI和KD0+ΔKD来控制空气的压力,使其具有良好的动静态性能。
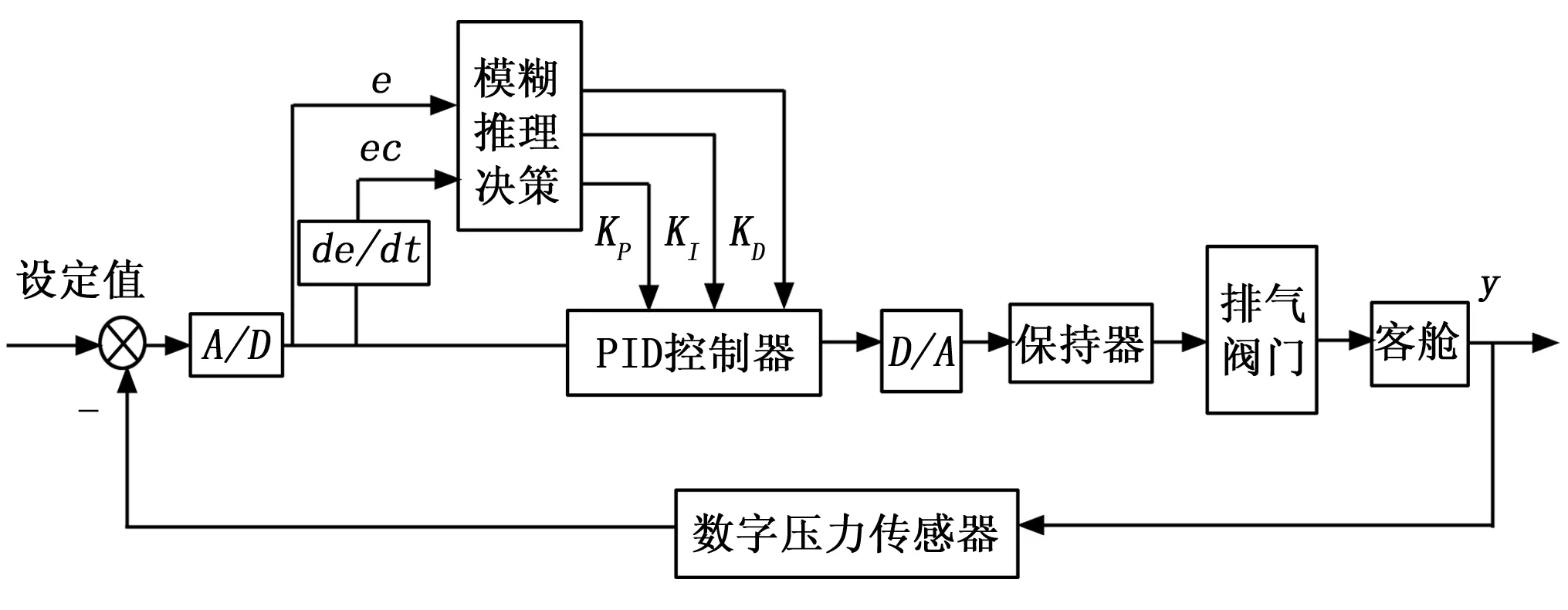
图5 座舱压力模糊自适应PID控制原理
2.4 模糊化及模糊控制规则
由于经典的PID控制器在飞机座舱压力控制中已取得良好的控制效果,因此采用模糊PID控制进行模糊化时,不必将模糊论域分得过细,将有利于提高在线查询的速度[5]。实验时,将输入变量误差E和误差变化率EC的论域取可为{-3,-2,-1,0,1,2,3},对应7个模糊语言状态:“负大(NB)”、“负中(NM)”、“负小(NS)”、“零(ZO)”、“正小(PS)”、“正中(PM)”和“正大(PB)”;输出变量ΔKP和ΔKD的论域取为{-2,-1,0,1,2},对应5个模糊语言状态:“负大(NB)”、“负小(NS)”、“零(ZO)”、“正小(PS)”和“正大(PB)”。输出变量ΔKI的论域取为{0,1,2},对应3个模糊语言状态:“小(S)”、“中(M)”和“大(B)”。采用加权平均法解模糊化。输入变量、输出变量的隶属函数均采用三角形函数,且宽度相等。模糊控制规则如表1、表2所示。

表1 ΔKP和ΔKD控制规则表

表2 ΔKI控制规则表
根据模糊推理决策的结果,PID控制器的3个参数在线调整为:
KP=KP0+ΔKP
(18)
KI=KI0+ΔKI
(19)
KD=KD0+ΔKD
(20)
式中,KP0、KI0和KD0为系统单独采用PID控制器时工程整定时对应的参数。
由此,根据数字增量式控制算法的公式就可计算出相应电压所需增量Δu:
Δu(n)=KP[e(n)-e(n-1)]+
KIe(n)+KD[e(n)-2e(n-1)+e(n-2)]
(21)
3 仿真及结果分析
3.1 座舱压力制度及客舱参数的确定
客机的压力制度主要考虑舱内驾乘人员的舒适性要求,防止高空缺氧症的发生。一般飞机要求巡航时舱内压力对应高度不超过2 400 m(75.6 kPa),同时考虑到压力的急剧变化对人的中耳有很大的影响,需将客舱压力增加速度控制在18~21.3 Pa/s范围内,减压速率要求控制在21.3~42.7 Pa/s范围内[1]。本系统以某型客机巡航高度10 000 m为例,控制目标为座舱高度1 948 m即80 kPa。座舱压力采用高余压制度,可按以下规律进行控制[6]:
Pc令=Ph+(P0-Ph)/1.5+3.3
(22)
式中,P0为海平面上的大气压力(kPa),h为飞行高度(m),Ph为h高度上的大气压力(kPa),Pc令为客舱内空气预期压力(kPa)。
该机客舱体积Vc131 m3,满载200人,客舱空气的温度Tc为295.15 K即22 ℃,新风量则不应低于1.8 kg/s,即6 480 kg/h。客舱温度调节的回风按50%计算,可计算出飞机巡航状态时,式(9)中流量常数k1为6 286,时间常数T1为64,排气阀门阀盘直径D为195 mm。选用某型24 V直流无刷电机驱动,式(13)中的时间常数T2为0.068,比例系数k3为0.04。
3.2 仿真结果分析
Matlab是一款功能强大的仿真软件,集数值计算、符号运算、可视化建模、仿真和图形化处理于一身。为了测试本数字控制器的控制效果,在Matlab中调用Simulink库中的FuzzyLogicToolbox子库中的相应模块进行仿真,并与经典PID控制的结果进行比较。
按以上稳态计算得到的模型参数,按最佳三阶模型对系统进行工程整定,发现经典PID控制器的结果不符合减压要求,减速太快,会引起压耳现象。因此,先对经典PID控制器的参数进行调整,确定KP0、KI0和KD0,再以此为基础,对模糊自适应PID控制器的参数进行调整,仿真结果如图6(a)所示。舱内压力初始状态设为90 kPa,经过295 s,压力降到最低为78.93 kPa(高于座舱高度2 400 m对应的压力75.6 kPa),平均减压速率为37.52 Pa/s,符合减压要求21.3~42.7 Pa/s,并在仿真时间内,达到稳态值80.02 kPa,稳态误差为0.025%,获得较好的控制效果。
然而,飞机飞行过程中高度的变化极大,供气量及供气压力的波动,舱内环境温度的变化以及客舱存在一定的泄漏,都会改变客舱压力系统的模型参数。改变式(16)中模型的参数,观察模糊自适应PID控制和经典PID控制的效果,如图6(b)~(f)所示。

图6 模糊PID自适应控制与PID控制仿真结果比较
分析图中的控制结果,图(b)为稳态设计模型,模糊自适应PID控制和经典PID控制均获得较好的控制效果。但当模型参数偏移设计值较小时,如图中(c)和(d)所示,模糊PID自适应控制和经典PID控制的超调量、动态误差及调节时间等数值接近,这源于PID控制强大的控制效果,鲁棒性强,可靠性高。但经典PID控制的减压速率均已超过规定值,图(c)由于客舱比例系数翻倍,而时间常数变小,使得经典PID控制减速偏快。图(d)客舱比例系数减半,而时间常数增大三分之一,使得经典PID控制减速偏慢。当参数偏移设计值较大,如图中(e )和(f),经典PID控制在仿真时间性能变坏,图(e )不得不增加仿真时间来观察控制效果。而图(f)中压力最低值已低于座舱高度2 400 m,同时压力的大幅震荡不但给舱内人员带来极大地不舒适感,影响乘客生命健康,而且长期的压力交替变化给客舱壁结构带来严重威胁,影响飞行安全。而与此同时,模糊自适应PID控制则表现出很强劲的控制效果,只有图(f)减压速率略超规定值外,其余最低压力值、减压速率和稳态误差均在要求范围内。
4 结束语
实际飞行过程中飞机的高度变化极大,供气量及供气压力存在波动,客舱内环境温度也会发生变化,以及客舱存在一定的泄漏,这些都会导致客舱压力系统的模型参数不固定。通过模拟飞行过程中几种不同的状态,观察客舱压力模糊自适应PID控制系统和经典PID控制系统的仿真输出。结果表明,对于飞机飞行参数、供气参数等不确定时,飞机客舱数字压力系统采用模糊自适应PID控制要比采用经典的PID控制效果要好得多,这不仅增加乘客乘坐体验,而且避免压力长期交替变化给客舱壁结构带来疲劳损伤,提升飞行安全,进而增强飞机的市场竞争力。
