集成电路极性测试“微整机”研究与应用
2021-05-06
(中科芯集成电路有限公司,江苏无锡 214072)
1 引言
集成电路极性测试一般指选择电路一个特定管脚进行电性能量测,快速判断电路放置是否反向、错位等,便于后道工序进行人工或机械自动化重新放置,规避电路发生测试异常风险。其属于集成电路成品测试阶段的一个项目,在一些高速测试平台上比较常见,比如转塔设备,极性测试被直接做成一个测试工站。
目前集成电路极性测试多数依赖于集成电路自动测试机(Automatic Test Equipment,ATE),功能强大和应用成熟的ATE 实现集成电路极性测试没有任何压力,但是测试性价比对于生产而言就是负利润。本文基于集成电路极性测试原理,研究并采用纯硬件的方式制作一款集成电路极性测试“微整机”,能和机械手(Handler)进行信息交互,实现自动化测试,具备简单、稳定、高效和极低成本的特点。
2 集成电路极性测试原理
集成电路极性测试(以下简称极性测试)原理和集成电路开短路测试(以下简称开短路测试)原理一致,都是对电路管脚的ESD 静电保护二极管的正向导通压降进行量测判断(特殊电路管脚结构不在此文章讨论范围),分Open Short to VDD(电源端)和Open Short to VSS(地端),通用测试原理参见图1,图中箭头方向代表电流流向。

图1 通用极性测试原理
以Open Short to VDD 测试为例,先把电路的VDD 引脚接0 V(或接地),再给每个电路引脚(DUT Signal Pin)施加一个100~500 μA 从测试机到电路的灌电流,电流会经上端二极管流向VDD(0 V),然后测量引脚的电压,正常值应该是一个二极管的导通电压,在0.7 V 左右,一般设参数上限为1.5 V,下限为0.2 V,大于1.5 V 判断为Open Fail to VDD,小于0.2 V判断为Short Fail to VDD。Open Short to VSS 测试方法类似,只是施加电流的方向反置,测试参数值为负值。
极性测试只需要选择一个特定电路引脚进行量测判断,而开短路测试一般情况下要扫描量测到所有的电路管脚。极性测试关注“快”,开短路测试关注“全”。
3 集成电路极性测试方法
3.1 ATE
对于测试工程师而言,ATE 是第一选择,原因在于其具备复杂且功能齐全的硬件资源,有熟悉的开发环境(指令已封装,无需底层开发),有友好的人机界面(参数设置和数据呈现可视化)和与机械手通讯的标准化接口等。但对于只需要测试电路某个特定管脚极性的需求,从性能上看,测试机能力应用不足1%,资源浪费严重;从空间上看,机械手空间本身就很紧凑,一台极性测试机和一台功能测试机同时在线,生产场地6S 管理会无法顾及;从成本上看,利用几万/几十万甚至百万单价的ATE 测试机进行极性测试是很不划算的。
3.2 极性测试“微整机”
基于ATE 极性测试原理,解析ATE 实现极性测试的硬件,在此基础上进行演变,设计并制作一款和ATE 具有同等极性测试能力的“微整机”,替代ATE所需的测试头(Test Head)、PC 主机和通讯主板等。极性测试“微整机”体现在两个“微”,一个是功能,只做极性测试,专机专用;一个是体积,只有传统ATE 体积的几百分之一。其典型的功能实现框图如图2 所示。
从图2 可以看出,极性测试“微整机”和传统ATE测试流程一致,功能需求的核心是“开路”“短路”“反向”和“正常”4 种电性能状态的判断和归类。
极性测试“微整机”用4 路比较器、2 路OC 与门等实现PN/NP 型产品上述功能需求,其电气原理如图3 所示。
极性测试“微整机”由供电单元Ⓐ、输入单元Ⓑ、比较运算单元Ⓒ和通讯接口单元Ⓓ4 部分组成,具体工作原理说明如下(为便于论述,均以PN 型产品为例进行阐述)。

图2 极性测试“微整机”功能实现框图
3.2.1 供电单元Ⓐ
供电单元使用DC(直流电源)24 V 作为输入,经过一块7812 三端稳压电路输出DC 12 V,这2 个直流电源是极性测试“微整机”的功耗来源。DC 24 V 直接使用机械手内部标准电源模块。
3.2.2 输入单元Ⓑ
输入单元由光耦器件(U2、U3)、PN/NP 型二极管(D3-PN、D3-NP)、电阻(R1、R2、R3、R4)和开关(SW2、SW4)组成,具体功能描述如下:
通过SW2 将D3-PN 二极管接入待测试回路,SW4 触发PN Start 信号(模拟机械手开始信号,便于仿真,实际机械手开始信号来自控制单元PLC 或板卡的I/O 端口),U3 AK 导通,R4作为限流电阻使用。U3 CE 导通并维持电压在VNP(此时VNP是VCE的导通压降,约0.2 V)。U2 AK 未使能,U2 CE 未导通,DC 12 V通过R1给D3-PN 二极管提供正向导通电流(一般为100~500 μA,由R1阻值确定),VPN是D3-PN 的正向导通压降和VNP的和,数值一般在0.65~1 V 之间(不同的PN 管导通压降会有差异),作为输入传递给比较运算单元。
3.2.3 比较运算单元Ⓒ
比较运算单元是极性测试“微整机”的核心,由一个4 通道差分比较器U6、可调式电阻(RV2)、电阻(R5、R6、R7、R8)组成。DC 12 V 通过RV2、R5、R7分压得到Vo1和Vo2,根据不同的PN 管测试需求通过RV2进行Vo1和Vo2两个数值的微调,进行输入值VPN和Vo1、Vo2的比较,最终实现如表1 所示的逻辑表。其中4 通道差分比较器的输出级均为集电极开路(Open Collector,OC)门,需要接合适的上拉电阻(R6,R8)进行负载能力控制才能起到预期的输出效果。
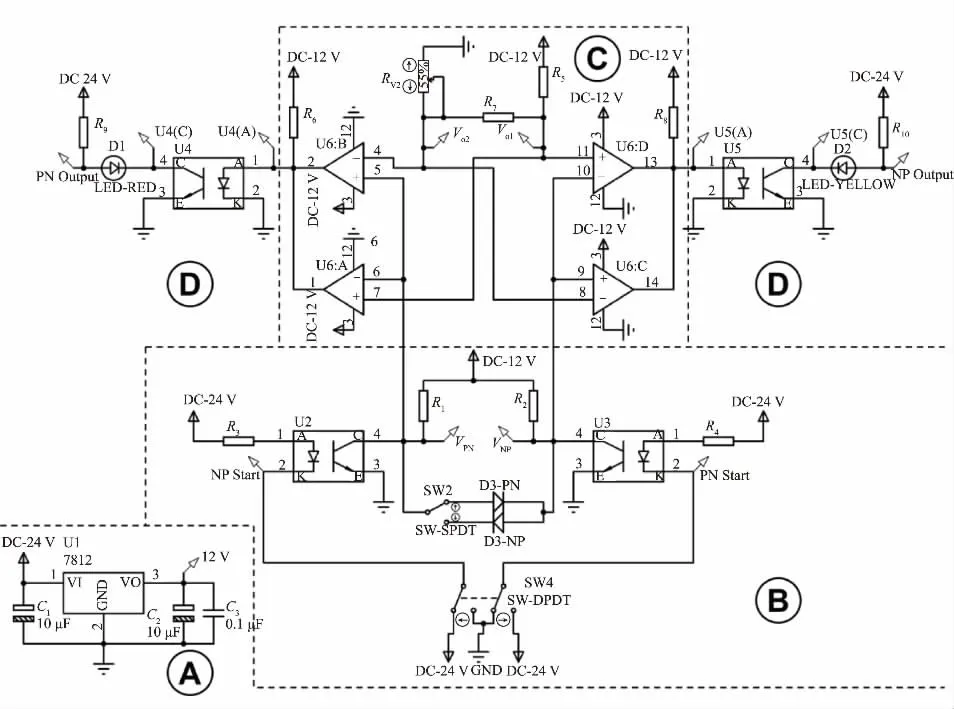
图3 极性测试“微整机”电气原理
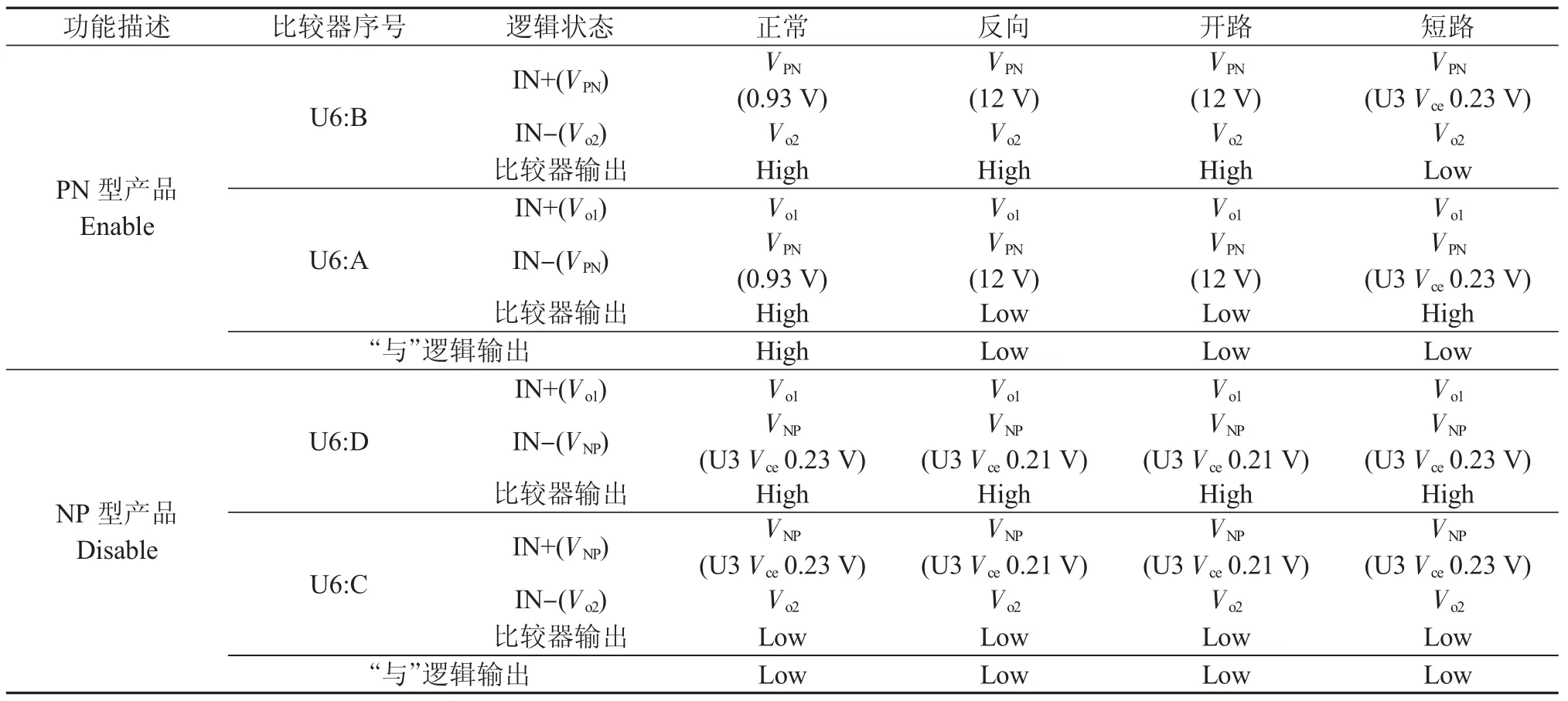
表1 极性测试“微整机”比较运算逻辑表
根据表1 所示,Vo2的数值介于0.23~0.93 V 之间,Vo1的数值根据测试需求一般设置在1.5~2.5 V 之间,根据Vo1和Vo2的数值需求设计R5、R7和RV2的具体阻值。
3.2.4 通讯接口单元Ⓓ
通讯接口单元用于和机械手进行信号交互,实现自动化测试。工作逻辑见图4,由光耦器件(U4、U5)、限流电阻(R9、R10)和两个发光二极管(D1、D2)组成,由比较运算单元的输出Y 决定发光二极管的点亮与熄灭,主要用于操作人员对量测结果进行直观的可视化判断,也便于后续调试、维护和故障检修,同时也是机械手的输入信号(机械手控制单元PLC 或板卡的I/O 端口会进行信号抓取),用于电路分选判断。
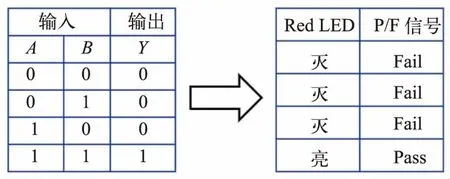
图4 机械手信号交互逻辑
NP 型二极管的量测原理同上,可根据实际测试需求进行灵活配置。
4 结束语
极性测试“微整机”硬件由2 个集成电路(一个4通道比较器和一个3 端稳压电路)、4 个光耦、2 个发光二极管及若干电阻、电容等组成,功能实现和ATE 的测试方法、自动化流程完全一致,只是其聚焦定位极性检测。
极性测试“微整机”成本不足百元,和ATE 动辄几万/几十万甚至百万的成本相比有天壤之别。“微整机”成本上的巨大优势只是表面,更重要的是对电路测试原理的深刻领悟和再应用。目前,极性测试“微整机”已经过Proteus 8 仿真并投入实际量产应用。
