一种收发互易的频带合成STAP-GMTI系统架构
2021-04-30常文胜陶海红代保全刘彦斌孙光才
常文胜,陶海红,代保全,刘彦斌,孙光才
(1.西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071;2.南京电子技术研究所,江苏 南京 210039;3.西安电子科技大学 物理与光电工程学院,陕西 西安 710071)
超高速平台GMTI雷达对大方位口径天线提出了需求,而超高速平台扁平的外形又对天线的安装空间造成了诸多限制。天线阵面的轻薄化有利于超高速平台适装大口径天线。以片上系统(SOC)[1]、系统级封装(SIP)[2]、封装级系统(SOP)[3]为代表的微系统在有源数字阵列上的应用,可有效地提升阵列集成度,缩减阵面的厚度。但是,片上系统的体积与其功耗有较大的关系。当芯片封装材料的导热性能一定时,片上系统自身功耗越大,其所需的散热面积也就越大,从而可能增大芯片的体积。模拟-数字转换器(ADC)和数字-模拟转换器(DAC)的功耗与ADC的采样速率和DAC的更新速率有显著关系。通常,当ADC或DAC的位数固定时,ADC的采样速率或DAC的更新速率越高,功耗越大。依据内奎斯特采样定理,信号带宽需小于ADC采样速率或DAC更新速率的1/2。
综上所述,基于微系统技术实现有源数字阵列的轻薄化,低瞬时带宽相比高瞬时带宽,更易实现阵列的轻薄化,也更适装于超高速平台。但是,地面运动目标的精确跟踪和目标识别提出了距离高分辨的需求[4-6]。针对这一需求,结合超高速平台低瞬时带宽有源数字阵列的适装性,提出了一种基于收发互易的低瞬时带宽数字阵列,通过频带合成[7-11]实现高分辨STAP-GMTI的系统架构。首先基于低瞬时带宽自发自收多通道阵列的系统架构建立信号模型,进行频带合成处理推导;由推导过程发现在该系统架构下,当目标偏离波束中心时,无法补偿阵列相位中心间距引起的相位差。针对这一情况,提出了基于低瞬时带宽收发互易的多通道天线架构,收发互易各阵列天线相位中心重合,无须补偿阵列相位中心间距引起的相位,从而可以实现精确的频带合成,提升目标的分辨率。宽带信号合成后采用STAP抑制杂波[12-15],实现高分辨率地面运动目标检测。
1 系统架构与信号模型
基于低瞬时带宽多通道天线的频带合成STAP-GMTI系统架构如图1所示。

图1 基于低瞬时带宽多通道天线的频带合成STAP-GMTI系统架构
2N个多通道阵列沿平台飞行方向布置,所有多通道阵列的口径尺寸均相同,每个多通道阵列之间的间距均为d。每个多通道阵列同时发射带宽为Δf的线性调频信号,但每个阵列发射信号的载频不同,相邻阵列天线间的载频相差Δf。

第k个阵列的发射信号为
(1)
距离Rk(tm)处的回波信号为
(2)
式中,Rk(tm)表示慢时间tm时刻第k个阵列的相位中心到目标的距离。
1.1 基于常规自发自收阵列多通道阵列的系统架构
基于常规自发自收多通道阵列的频带合成STAP-GMTI系统架构如图2所示。每个多通道阵列的方位口径为L,全阵面发射,M个子阵同时接收。整个阵列的中心为坐标原点,则第k个多通道阵列发射相位中心:

图2 常规自发自收多通道阵列频带合成STAP-GMTI系统架构
(3)
第k个多通道阵列的第m个子阵的接收相位中心为
(4)
当发射相位中心和接收相位中心之间的距离远小于雷达到目标之间的距离时,等效的收发相位中心在接收相位中心和发射相位中心连线的中点,则第k个多通道阵列的第m个子阵的收发等效相位中心为
(5)
采用各个多通道阵列天线相同序号子阵接收到的信号进行频带合成,则相邻多通道天线相同序号子阵如第k个多通道天线的第m个子阵和第k+1个多通道天线的第m个子阵的等效收发相位中心的间距为
ds=X(k+1,m)-X(k,m)=L+d。
(6)
由式(6)可知,相邻多通道天线相同序号子阵的等效收发相位中心的间距相等,与k和m无关。因此,基于常规自发自收多通道阵列的频带合成等效为2N个间距为L+d的天线等间距排布,每个天线自发自收,相邻天线间的载频相差Δf。常规自发自收多通道阵列频带合成可简化成如图3所示的模型。

图3 常规自发自收多通道阵列频带合成等效模型
第k个天线参考信号为
(7)
则第k个天线基带回波信号可表示为
(8)
式中,τ=2Rk(tm)/c,表示目标信号时延。
按照窄带信号(对应带宽Δf)进行采样,因此在宽带合成拼接处理前,先要对基带回波信号进行升采样处理,升采样后的信号形式与式(8)相同。
由式(8)可知,不同天线的基带回波信号的频谱是重合的。为了使合成宽带信号实现高距离分辨率,要对升采样后的基带信号进行频移处理,将不同子带信号搬移到相应的频率位置。
频移函数可表示为
(9)
乘上频移函数后,将Δf=γTp代入,则频移处理后的信号可表示为
(10)
对于图3中的线阵模型,考虑远场条件有
Rk(tmk)=Ro(tm)-lkcosψ,
(11)

将式(11)代入式(10)合并并简化后,可得
(12)
式(11)中的幅度项和第1个指数项表示线性调频信号的时间延迟;第2个指数项表示各天线统一的回波延时相位;第3个指数项为不同天线间的固定相位差;第4个指数项为不同天线间的空间相差。若能对幅度项和第1个指数项中由不同天线相位中心引起的延时2lkcosψ/c、第3个指向项的固定相位差和第4个指向项进行精确补偿,就可以类似地采用步进调频信号子带合成的方法,再经过一次时移后,合成一个完整的宽带线性调频信号。
对于正侧视雷达来说,杂波的多普勒频率与空间频率一一对应,可较好地补偿杂波时延。首先将回波变换到多普勒域,那么每个多普勒频道内杂波对应的空间角度为
ψ=arccos (λfa/2v) ,
(13)
因此可在多普勒域对杂波进行补偿。式(13)中,fa为多普勒频率,v为平台飞行速度。
而由于目标存在径向速度,其所在的多普勒通道与其来波方向并不存在明确的对应关系,从而不能进行精确补偿,只能采用波束指向角ψ0进行补偿。采用波束角对式(12)进行时延和相位补偿后,有
(14)
采用波束中心角ψ0进行补偿后,在3 dB波束宽度范围内,由时延带来的误差通常可忽略,而不同阵列间的空间相位差却不能忽略。由式(14)可知,当目标严格位于波束中心指向时,不同阵列间目标信号的空间相差能够精确补偿;否则,由于目标在波束宽度范围内的来波方向不可预知,不同阵列间空间相差不能够精确补偿,从而导致子带频率合成性能变差。
1.2 基于收发互易多通道阵列的系统架构
由以上分析可知,基于常规自发自收多通道阵列的频带合成STAP-GMTI架构,当目标偏移波束中心时,由于目标的来波方向不可预知,不同天线间目标信号的时延和空间相差不能精确补偿,导致频带合成性能变差。
针对这一问题,笔者提出基于收发互易多通道阵列的频带合成STAP-GMTI系统架构,见图4。与基于常规自发自收多通道阵列的频带合成STAP-GMTI架构不同之处在于,第k个多通道天线的发射与接收和第2N+1-k个多通道天线的发射与接收互易,即第k个多通道天线发射,第2N+1-k个多通道天线接收第k个多通道天线的回波;第2N+1-k个多通道天线发射,第k个多通道天线接收第2N+1-k个多通道天线的回波。

图4 收发互易多通道阵列频带合成STAP-GMTI系统架构
基于收发互易多通道阵列的频带合成STAP-GMTI系统架构,其第k个多通道阵列的第m个子阵的收发等效相位中心为
(15)
采用各个多通道阵列天线相同序号子阵接收到的信号进行频带合成。由式(15)可知,各个多通道天线的第m个子阵的等效收发相位中心位于同一坐标处,等效收发相位中心的间距为零。由于间距为零,所以Rk(tmk)=Ro(tm)。在基于收发互易多通道阵列的频带合成STAP-GMTI系统架构下,式(10)更改为
(16)
由式(16)可知,不同天线间的回波延时和空间相差均相同,因此可以直接进行后续的频带合成处理。首先补偿式(16)的固定相位差,固定相位补偿因子为
(17)
式(17)与式(16)相乘后,有
(18)
基于驻相原理[16],将式(18)变换到距离频域:

(19)
频域时移补偿函数为
(20)
式(19)乘上频域时移补偿函数再反变换回时域后,有
(21)
(22)
由式(22)可知,各个多通道阵列天线相同序号子阵接收到的信号均可以进行频带合成,合成为宽带信号。M个子阵合成M路宽带信号,信号带宽为2NΔf。由式(15)可知,相邻子阵收发等效相位中心之间的间距为
(23)
M个子阵合成的宽带信号回波可表示为

(24)
式中,Q表示相参脉冲个数,L表示接收通道个数,上标T表示转置运算。
基于STAP处理的杂波抑制可表示为
y=wHx,
(25)
式中,w=μR-1s,μ表示自适应滤波器系数,R表示杂波协方差矩阵,s为导向矢量,上标H表示共轭转置运算。利用STAP技术完成杂波抑制处理后,采用宽带信号检测算法[17-19]完成地面运动目标的检测,提取地面运动目标的高分辨距离像。
2 仿真验证
仿真参数设置见表1。

表1 仿真参数
基于表1中的仿真参数,对基于常规自发自收的多通道阵列的频带合成STAP-GMTI系统架构和基于收发互易多通道阵列的频带合成STAP-GMTI系统架构进行仿真对比。以下采用构型一和构型二分别作为常规自发自收阵列系统架构和收发互易阵列系统架构的代称。构型一频带合成STAP处理、构型二频带合成STAP处理后,目标 1和目标2输出功率对比(输出功率数值只具有相对意义)见图5。
由图5可知,构型二目标1输出功率相比子带提升5.7 dB,构型二目标2输出功率相比子带提升5.8 dB,接近理论值(4个子带频带合成输出功率提升6 dB)。收发互易频带合成目标输出功率相比子带输出功率提升近6 dB,与理论相符合。构型一目标1输出功率相比构型二降低2.4 dB,构型一目标2输出功率相比构型二降低2.5 dB,这是由于目标相对波束指向偏离了0.02°。

(a) 子带与构型二目标1输出功率对比
依据表1中的仿真参数,可知按波束指向角补偿后,阵列之间的延时差:
2lk(cosψ-cosψ0)/c=[10-5μs,3.4×10-6μs,-3.4×10-6μs,-10-5μs]。
由计算结果可知,按波束指向角补偿后,阵列之间的延时差很小,可忽略。不同阵列间的空间相位差:
由计算结果可知,按波束指向角补偿后,不同阵列的空间相位差不可忽略,因此构型一相比构型二目标的输出功率降低约2.5 dB,主要是由于不同阵列间的空间相位差引起的。不同阵列间的空间相位差不仅导致构型一相比构型二目标输出功率降低,同时宽带合成后的距离脉压曲线也严重恶化,如图6所示。
由图6可知,目标1单个子带的距离分辨率为4.46 m,构型二频带合成后,分辨率提升为1.18 m,分辨率提高了3.80倍;目标2单个子带的距离分辨率为4.22 m,构型二频带合成后分辨率提升为1.07 m,相对子带分辨率提高了3.94倍,略小于理论值(4倍)。这是由于仿真时采用了斯威林Ⅰ目标起伏模型造成的。而构型一由于不同阵列间的目标存在相位差,因此频带合成后的效果并不理想,插值后主瓣发生了分裂。
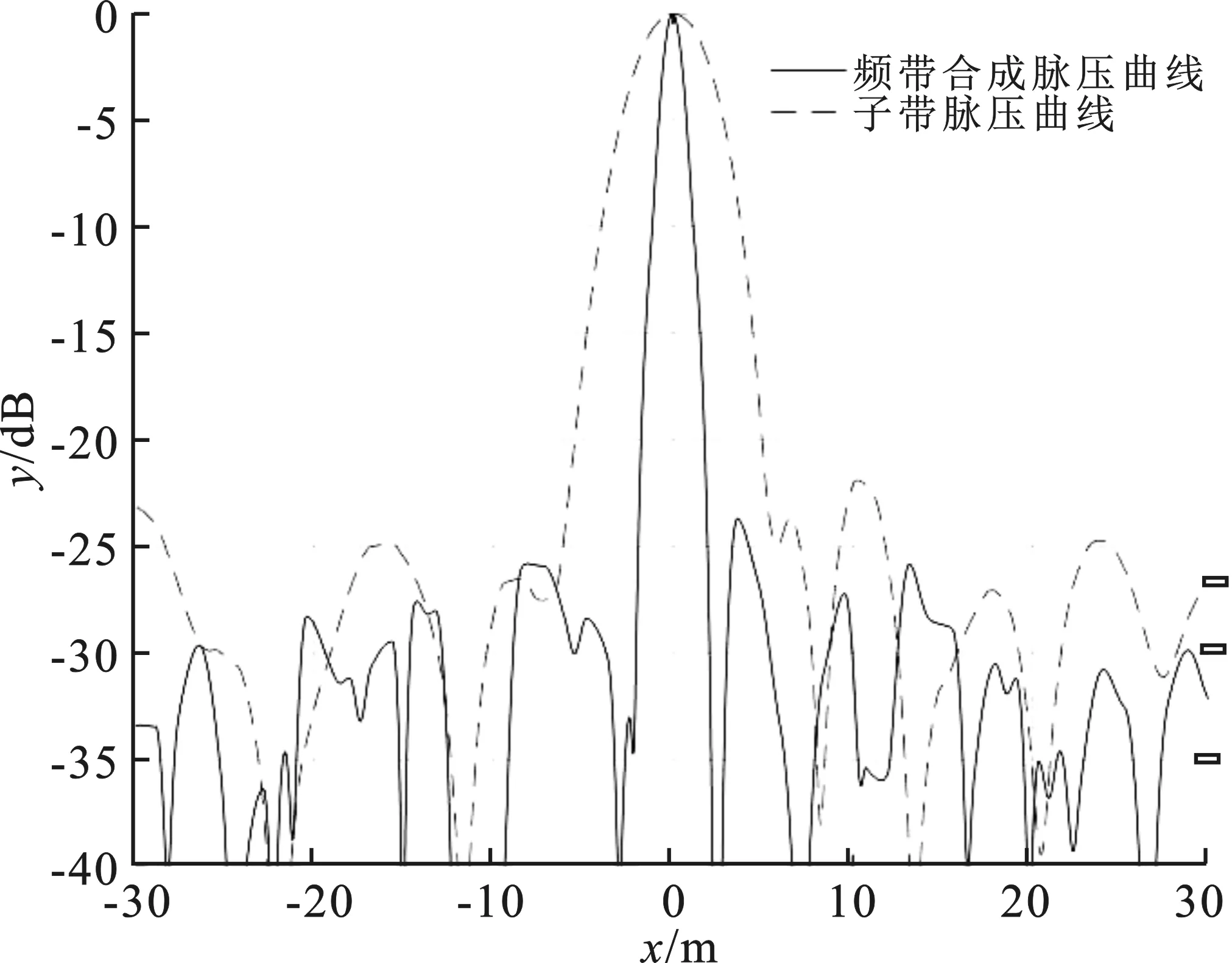
(a) 子带与构型二目标1脉压剖面
3 总 结
低瞬时带宽相比高瞬时带宽,更易实现有源数字阵列的轻薄化,从而能够更好地满足超高速平台GMTI雷达对大口径天线的需求,而地面运动目标的精确跟踪和目标识别则提出了距离高分辨的需求。
结合超高速平台低瞬时带宽有源数字阵列适装性和地面运动目标距离高分辨的需求,提出了一种基于收发互易的低瞬时带宽数字阵列,通过频带合成实现高分辨STAP-GMTI的系统架构,仿真验证了该系统架构的有效性。该系统架构本质上是一个多任务系统架构,如所有多通道阵列指向同一个目标或同一块区域,可以通过频带合成实现高分辨率STAP-GMTI;若不同的多通道阵列指向不同的区域或不同的目标,则可以实现多区域同时搜索或多目标同时跟踪,提升搜索数据率或目标跟踪数量。
