利用幅度重排的机载火控雷达工作模式识别方法
2021-04-30杨秋,顾杰,魏平
杨 秋,顾 杰,魏 平
(1.电子科技大学 信息与通信工程学院,四川 成都 611731;2.电子信息控制重点实验室,四川 成都 610036;3.中国人民解放军95786部队,四川 成都 614000)
机载火控雷达工作模式识别是机载电子对抗的关键环节,如何快速准确地识别机载火控雷达的工作模式,特别是含跟踪信号的高威胁工作模式,是夺取机载电子对抗主动权的关键环节[1-3]。按照工作环境和作战任务不同,机载火控雷达工作模式分为对地(海)工作模式和对空工作模式。对地(海)工作模式主要包括地形跟随/回避、地图测绘、地图扩展、多普勒波束锐化、地面动目标检测、固定目标跟踪、海情I、海情II以及信标模式等;对空工作模式主要包括边搜索边跟踪(Track While Search,TWS)、搜索加跟踪(Track And Search,TAS)和单目标跟踪(Single Target Tracking,STT)[4]。笔者的研究对象为机载火控雷达对空工作模式的识别方法。
目前,识别机载火控雷达对空工作模式的公开研究成果主要可概括为两大类:一类是借鉴图像处理领域成熟的模式识别等技术,将信号变换到图像域进行识别。这类方法在一些特定场景下能够取得较好的识别效果,但一方面识别效果受变换后的图像分辨率限制,另一方面信号由参数域向图像域变换会导致不可避免的信息损失,且难以根据图像域的识别结果反推信号域参数,也就难以进行多源信息融合验证;另一类是基于信号特征参数本身的识别方法[5],如利用载频、脉宽、脉冲重复频率以及脉内特征等参数在不同模式下的差异性特征,在信号域直接识别。根据有无先验数据率支撑,信号域的识别方法又分为基于已知数据库的比对识别和无数据库的盲识别两类。显然基于已知数据库的比对识别方法准确、简单、快捷和高效,但实际应用中,由于很难获得对方机载火控雷达的完备工作模式,数据库往往应用受限[6],因此无数据库的盲识别方法近年来越来越受到重视。
在分析机载火控雷达对空工作模式特点的基础上,发现载频、脉冲重复间隔和脉宽等参数规律在前端信号分选环节已经被充分挖掘利用,很难再利用其直接识别不同工作模式。但脉冲幅度在识别机载火控雷达对空工作模式方面具有潜在的优势[7-8],这是因为脉冲幅度与脉冲功率密切相关,短时间内幅度变化主要是由天线波束调制引起的,即具有相对稳健的特征[9-11]。基于以上分析,立足于盲识别思路,笔者提出了一种利用幅度重排的机载火控雷达对空工作模式的识别方法。该方法利用跟踪信号与搜索信号重排幅度不同的分布特性,进而识别包含跟踪信号的高威胁工作模式。
1 不同工作模式信号幅度特征
机载火控雷达不同工作模式对应不同的时间、能量等资源分配方式[12-15]:TWS模式下资源全部用于搜索,多使用高、中重频交替策略以较低数据率进行空域搜索,搜索周期比较长,信号幅度呈现类似SINC形状变化特性;TAS模式下资源用于搜索和跟踪两部分,跟踪多采用较高数据率的中重频,搜索仍使用较低数据率的高、中重频交替策略,跟踪信号幅度呈现类似直线的缓变特性,而搜索信号幅度仍呈现类似SINC变化特性;STT模式下资源全部用于跟踪,多使用中重频进行高数据率的跟踪,幅度值比较稳定,也呈现出和TAS模式中跟踪一样类似直线的缓变特性。在不考虑人为干扰、脉冲丢失等情况下,各模式下脉冲幅度分布特性分别如图1所示。
2 利用幅度重排的工作模式识别方法
利用幅度信息识别机载火控雷达工作模式的核心思想是:搜索信号幅度整体上呈现起伏明显的SINC包络特性,而跟踪信号幅度相对稳定呈现类似线性变化的特性,且跟踪信号数据率略高于搜索信号数据率。因此,检测信号幅度参数有无呈现类似线性变化特性的,可以成为有无跟踪信号的检测依据。
在检测方法上,尽管Hough变换(Hough Transform,HT)是处理直线检测问题的一种经典算法,在诸多领域得到了广泛应用[11,16-17],但由于直线在参数空间中的映射容易受到邻近目标、噪声以及本身非理想状态的干扰,算法中的投票过程较易出现无效累积,进而导致虚检、漏检及端点定位不准等问题,实际应用中检测效果不佳。
通过分析各工作模式的信号特征发现,打乱信号按到达时间排序的模式,重新按照幅度大小进行排列,则可以将幅度相近的信号集中在一起,特别是跟踪数据率略高于搜索数据率,将使得集中的跟踪信号更为明显,这就是利用幅度重排的机载火控雷达工作模式识别方法的核心思想。无跟踪的TWS模式和有跟踪的TAS模式信号重排幅度及其一阶差分分布如图2所示。
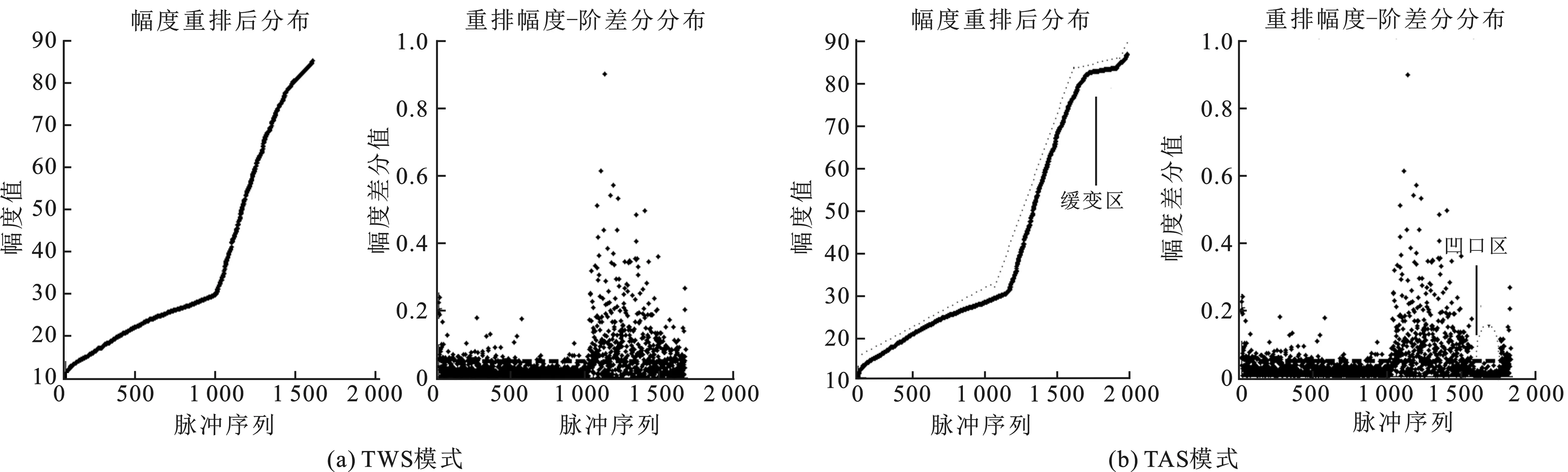
图2 TWS与TAS模式下脉冲序列重排幅度与重排幅度差分分布特性
通过图2可以看出:① 由于幅度呈类似线性分布的跟踪信号的存在,TAS模式信号重排幅度相比TWS模式信号重排幅度增加了一段明显的“缓变区”,“缓变区”位于重排幅度峰值附近,“缓变区”长度与跟踪信号比重成正比,“缓变区”坡度主要由跟踪信号幅度起伏特性决定;② TAS模式信号重排幅度增加的“缓变区”对应其幅度一阶差分增加的“凹口区”,“凹口区”宽度也与跟踪信号比重成正比,跟踪信号幅度起伏越小,重排幅度的“缓变区”越平缓,重排幅度差分的“凹口区”越低,越有利于跟踪信号检测。
利用幅度重排的机载火控雷达工作模式识别方法流程如图3所示。
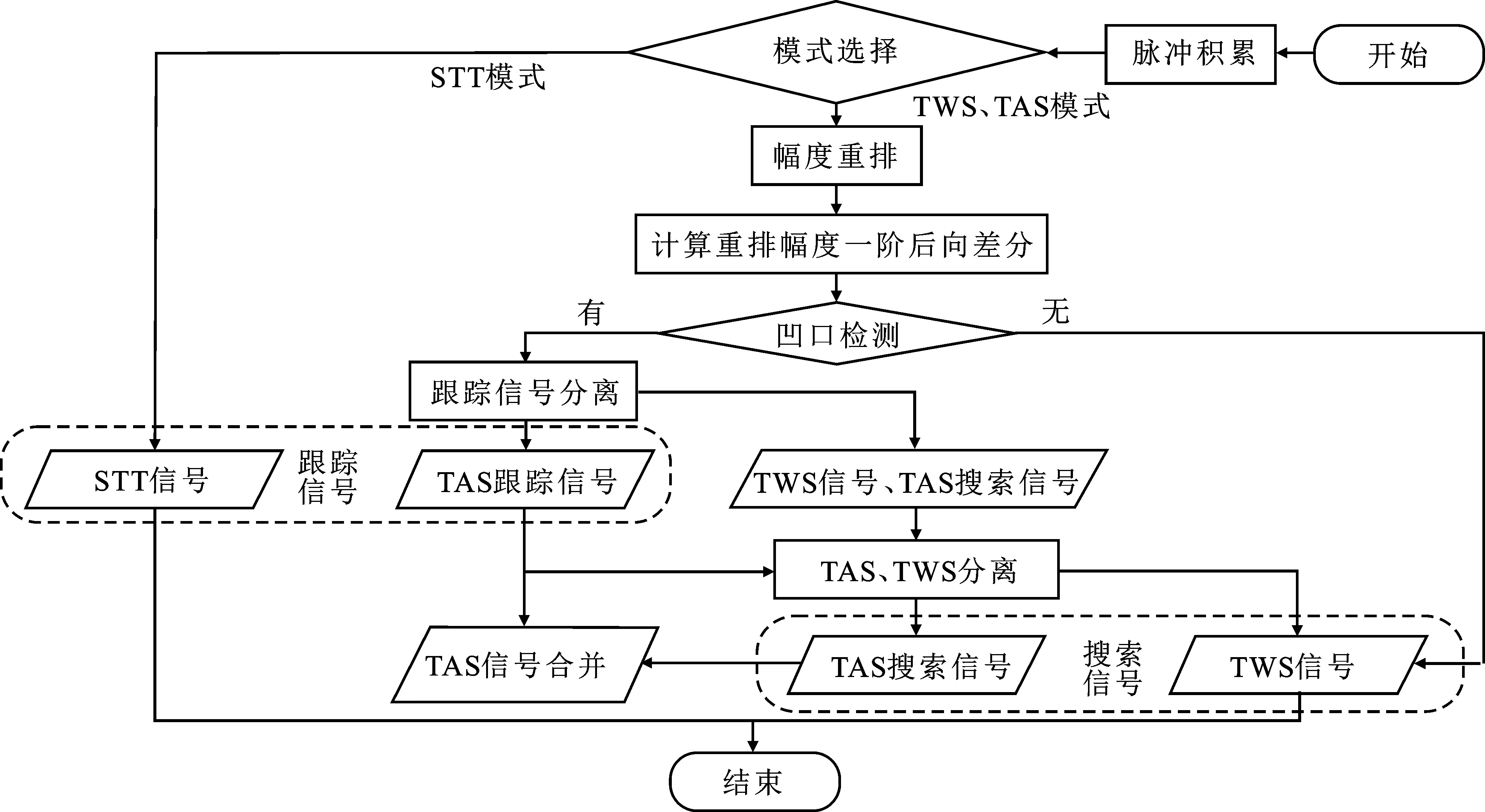
图3 利用幅度重排的机载火控雷达工作模式识别方法流程图
待识别的脉冲描述字xi可表示为
(1)
其中,fi、pi、τi、ti和θi分别表示脉冲信号的载频、幅度、脉宽、到达时间和到达角,N为脉冲个数。
(2)
计算重排信号幅度的一阶后向差分Δp′:
Δp′=p′(i+1)-p′(i),i=1,2,…,N-1。
(3)
根据幅度差分检测门限δΔp和过检测门限脉冲数量门限δnum检测跟踪信号,有
(4)
3 仿真试验与结果分析
3.1 参数设置
仿真试验待识别信号包含了TWS、TAS和STT 这3种工作模式信号,其中TWS和TAS中的搜索信号单个搜索包络设置200个脉冲,每个波位8个脉冲;STT和TAS中的跟踪信号为6个脉冲每个波位。为更接近真实环境特性,对上述数据进行了如下处理:① 考虑侦察接收机存在各种噪声影响,因此所有脉冲幅度值均加入了服从(0,1)均匀分布的随机噪声;② 考虑侦察接收机存在不可避免的脉冲丢失,因此以总脉冲数的5%进行了随机脉冲丢失。经过上述处理后的待识别信号幅度分布如图4所示。
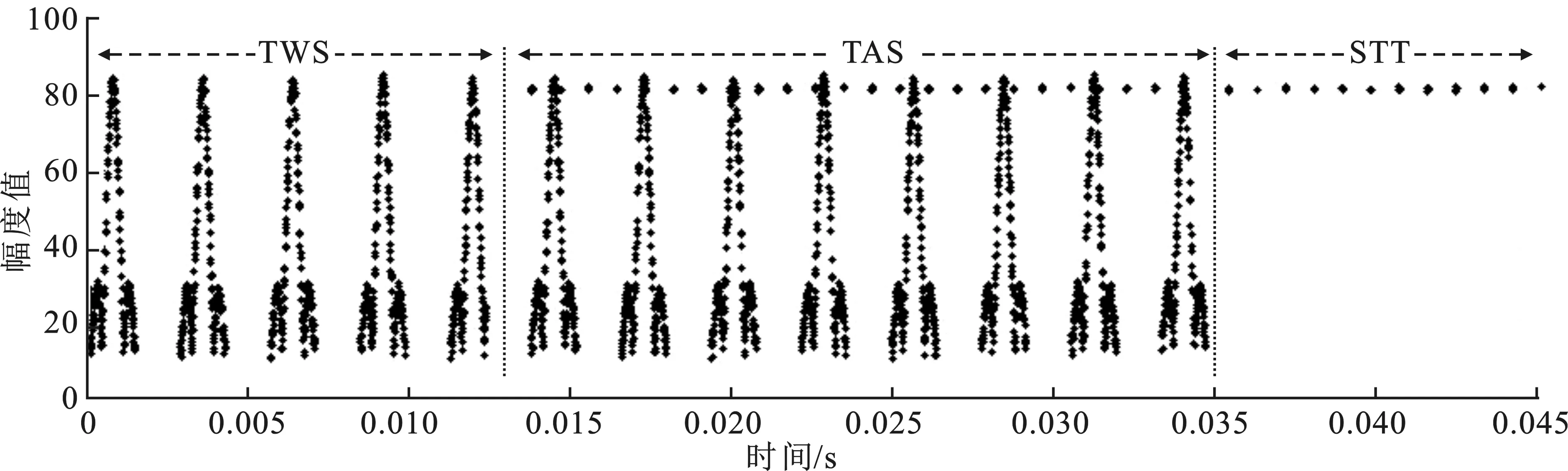
图4 待识别信号时间-幅度分布
3.2 结果分析
采用文中方法识别结果如图5所示。其中图5(a)为识别出的TAS、TWS信号分路中的跟踪信号,进一步剔除被误识别为跟踪的TWS信号后,最终识别结果如图5(b)所示。
对比分析图4和图5可知,TAS、TWS信号分路中的跟踪信号能够被有效识别,尽管由于少量的TWS信号和TAS信号中的搜索信号由于幅度也分布在跟踪信号幅度附近,也被误识别为跟踪信号,但通过对识别结果进一步做差值直方图处理,有效剔除了被误识别的TWS信号,降低了识别结果的错误率。
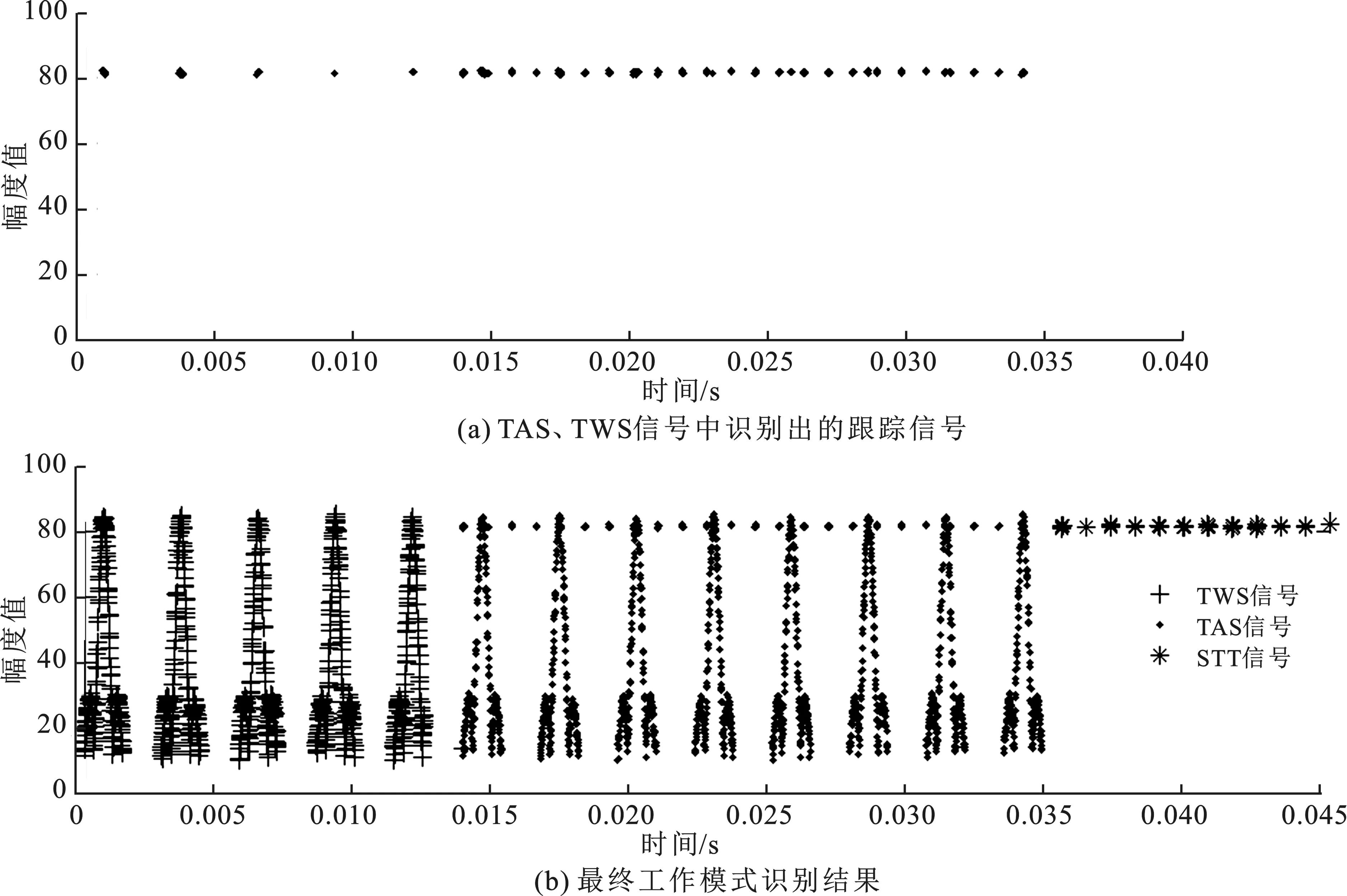
图5 对机载火控雷达工作模式的识别结果
为检验所提方法的稳定性,采用蒙特卡罗方法进行了100次仿真试验,对TAS中跟踪信号的准确识别率和漏识别率的统计结果如图6所示。
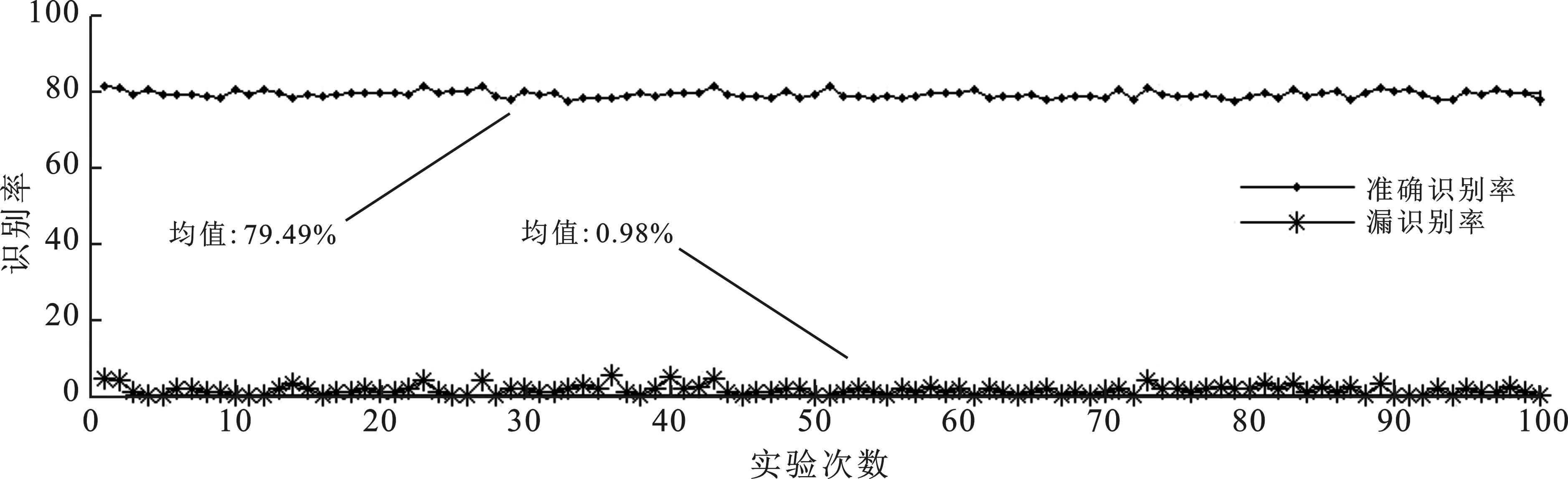
图6 多次试验TAS中跟踪信号识别率统计
上述试验结果表明,只要存在高威胁的跟踪信号,文中方法都能够以较高准确率识别跟踪信号,并且对跟踪信号的漏识别率比较低。在时效性方面,待识别信号脉冲总数为2 770,100次试验用时约1.6 s,平均每个脉冲的处理时间为5 μs左右,具备了较好的实时脉冲处理能力。
另外,实际应用中需要考虑以下主要问题:① 信号分选识别普遍采用分段处理方法,因此待识别的信号中有的TAS信号多,有的TWS信号多,即不同的TAS数据量与TWS数据量比值对识别结果的影响有多大;② 由于信噪比、天线扫描等多方面原因,待识别信号存在不同程度的脉冲丢失,不同丢失率对识别结果的影响如何;③ 由于人为干扰和前端信号分选能力有限等原因,待识别信号中不可避免会存在各种干扰脉冲,识别结果对干扰脉冲敏感程度如何。为此,在上述试验基础上,进一步分别仿真了以上3种情形下文中方法的识别结果,如图7所示。
从图7(a)可以看出,当TAS数据量比重较小时,此时由于跟踪信号所占比重非常小,因此信号重排幅度一阶差分的凹口区间长度太短,难以被检测,也即无法识别出跟踪信号;当TAS数据量与TWS数据量比值达到45.75%时,尽管此时跟踪信号比重只有2.83%,但此时文中方法已经能够以88.71%的准确率识别出跟踪信号;随着TAS数据量与TWS数据量比值的继续增加,文中方法能够稳定地以较高准确率识别出跟踪信号,并且识别准确率呈现出稳步上升趋势。
从图7(b)可以看出,当脉冲丢失率低于60%时,文中方法能够以约70%的准确率稳定地识别出跟踪信号,且对跟踪信号的漏识别率低于10%;当脉冲丢失率高于60%时,所提方法的识别性能稳定性变差,这是由于当随机丢失的脉冲主要是跟踪信号时,信号幅度一阶差分分布的凹口变窄,检测门限难以自适应设定,检测难度加大甚至难以检测。而当随机丢失的脉冲主要是搜索脉冲时,跟踪信号在全部信号中的比重反而加大,反而更有利于识别跟踪信号,个别时候甚至比前面丢失率较低的准确识别率更高。
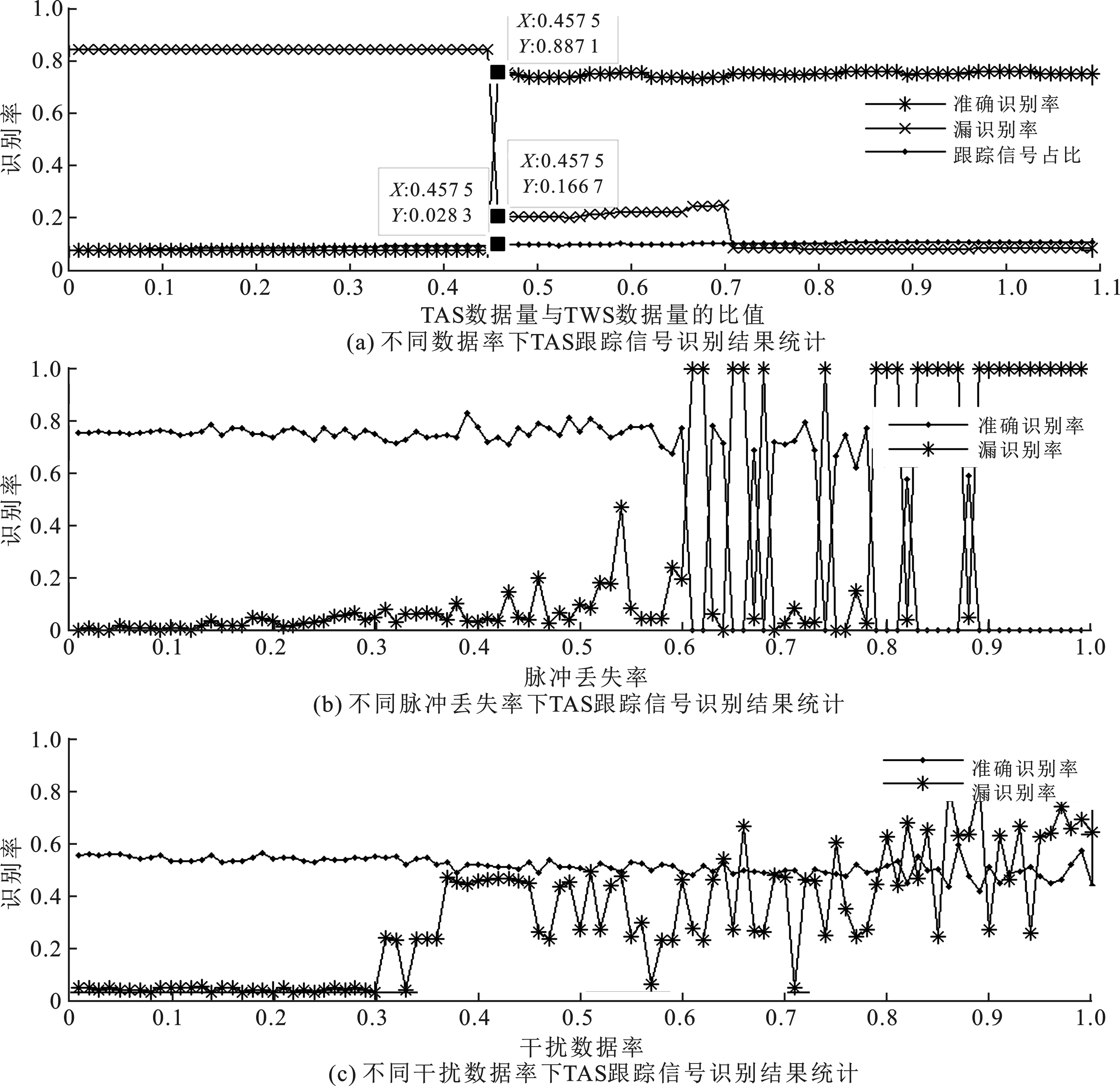
图7 不同条件下识别结果统计
从图7(c)可以看出,随着干扰数据率的不断增加,对跟踪信号的准确识别率呈缓慢下降趋势,但即使干扰数据率达到100%,也能以约50%的准确率识别出跟踪信号;另外,在干扰数据率低于30%时,对跟踪信号的漏识别率一直维持在1%左右,当干扰数据率高于30%时,对跟踪信号的漏识别率也随之逐渐增加。需要说明的是,当存在干扰信号时,STT模式的信号难以首先被识别,因此最终识别的跟踪信号包括TAS中的跟踪信号和STT信号,但这并不影响对高威胁的跟踪信号性质的判定。
更进一步地,在同时存在干扰脉冲和脉冲丢失的情况下,以10%为步长,得到了不同干扰数据率和数据丢失率下对跟踪信号的识别率统计结果如图8所示。
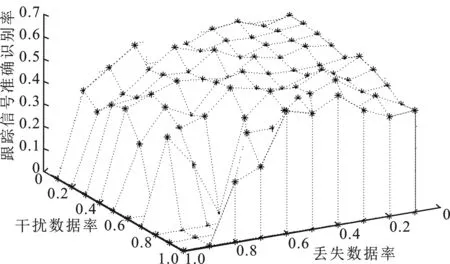
图8 同时存在数据丢失和干扰信号情况下的跟踪信号识别结果
以上系列试验结果表明,针对不同情形下机载火控雷达工作模式识别需求,笔者所提方法能够较为准确地识别出含跟踪的高威胁工作模式,且所提方法对数据丢失和脉冲干扰均不敏感,计算速度快。
4 结束语
针对机载火控雷达高威胁工作模式识别的问题,立足盲识别思路,笔者提出了一种利用幅度重排的机载火控雷达工作模式识别方法。所提方法对脉冲丢失和干扰不敏感、识别准确率较高,且计算简单、运算量小,便于工程化实现。文中的方法主要集中于包含单目标跟踪信号的识别,如何识别包含多目标跟踪的MTT工作模式以及有效提取类似SINC形状的搜索包络,特别是便于工程化实现的提取方法,将是后续拟进一步开展的研究工作。
