一种深度神经网络多站雷达系统干扰鉴别方法
2021-04-30刘洁怡公茂果张明阳
刘洁怡,公茂果,詹 涛,李 豪,张明阳
(1.西安电子科技大学 电子工程学院,陕西 西安 710071;2.西安电子科技大学 计算机科学与技术学院,陕西 西安 710071)
现代战争的电磁环境愈来愈复杂,以电子干扰为代表的电子战技术对雷达系统的检测性能和作战效能造成了严峻的挑战和威胁。有源欺骗式干扰作为需要应对的一种重要干扰样式,通过延迟、调制、转发,生成虚假的目标信息,致使雷达的信号接收系统对于真实目标的检测性能降低,或者无法对目标参数准确估计[1]。为完成目标检测,雷达系统需采用相应的电子对抗技术,强大的干扰对抗能力是现代电子战争中雷达生存和工作的基础保障[2]。
面对单站雷达干扰对抗的诸多限制,多雷达协同作战方式成为一种发展趋势。未来的电子战过程中,多部类型相同或不同的雷达站将以一定的分布方式构成多站雷达系统。通过对空间分布的各节点雷达链接成网,构成网络化探测系统,根据不同频段、不同观测角度和不同工作模式,形成高密集度的多维信号空间[3-4]。相比单站雷达系统,多平台多传感器可以在融合中心将系统中各节点雷达采集到的信息进行共享及融合处理,从而极大地提高系统的体系化抗干扰能力[5-10]。
对于多站雷达系统捕获的大量目标回波数据集,进行高效、稳定的融合处理是信号处理技术的关键问题。现有算法仅依据人工提取的单一特征进行分类识别,由于人工提取特征全面性不够,对多站雷达捕获的大量回波数据利用率不高,制约了干扰鉴别效果。神经网络[11-14]作为模仿生物大脑结构和功能的信息处理模型,以其自学习、自组织、非线性、大规模和并行分布处理等特性,可有效缓解人工提取特征造成的信号资源利用不充分、特征提取条件过于理想等问题。对比传统欺骗式干扰对抗算法,深度神经网络(Deep Neural Network,DNN)模型尝试对目标提取多维本质特征,协同发掘更深入的真假目标差异,便于不同体制、不同视角差异的多雷达回波之间融合处理,提升干扰对抗方法的有效性和普适性[15]。因此将深度神经网络应用于多站雷达系统,对欺骗式干扰进行识别、抑制,不失为一种可行的新机理和新方法,为对抗复杂的电子干扰环境提供更多的技术途径。
笔者提出了一种基于深度神经网络的干扰鉴别方法,通过对多站雷达系统中,不同雷达站获取的复包络信息联合处理,利用人工智能的方法对未知信息深入学习,挖掘除相关性之外的更多维、更全面、更完善、更深层的特征差异,弥补人工提取特征单一、鉴别效果不理想等问题;有效降低了噪声和脉冲数量对干扰鉴别概率的影响,同时缓解了非理想条件下目标回波相关系数对干扰对抗技术的限制,可更好地面对由于目标复幅度部分相关而带来的漏警,以及各雷达站中干扰信号相关性减弱带来的虚警等问题,拓宽了应用过程的边界条件。
1 多站雷达系统模型构建
多站雷达系统融合中心多采用数据级融合处理的方式,具有数据量小,通信带宽要求低,易于实现的特点。但数据级融合处理方式量测过程中仅利用目标点迹,丢弃原始回波数据中与目标特性相关的幅度或相位等信息,数据利用率低势必损失一定的抗干扰性能[15]。文中考虑利用信号级融合处理方式,不再区分欺骗式干扰类型,综合运用了各雷达站的目标回波信息,提高原始回波利用率,从而提升了系统欺骗式干扰的对抗性能。
1.1 目标和干扰模型构建
如图1所示,构建信号级融合处理结构的多站雷达系统模型。假设已经完成时间和相位同步,则第k个接收站的基带接收信号为rk(t,q),其中,t表示快时间域,q表示慢时间域。接收信号rk(t,q)为真实目标回波信号sk(t,q)、欺骗式干扰信号jk(t,q)和噪声信号nk(t,q)的叠加,即
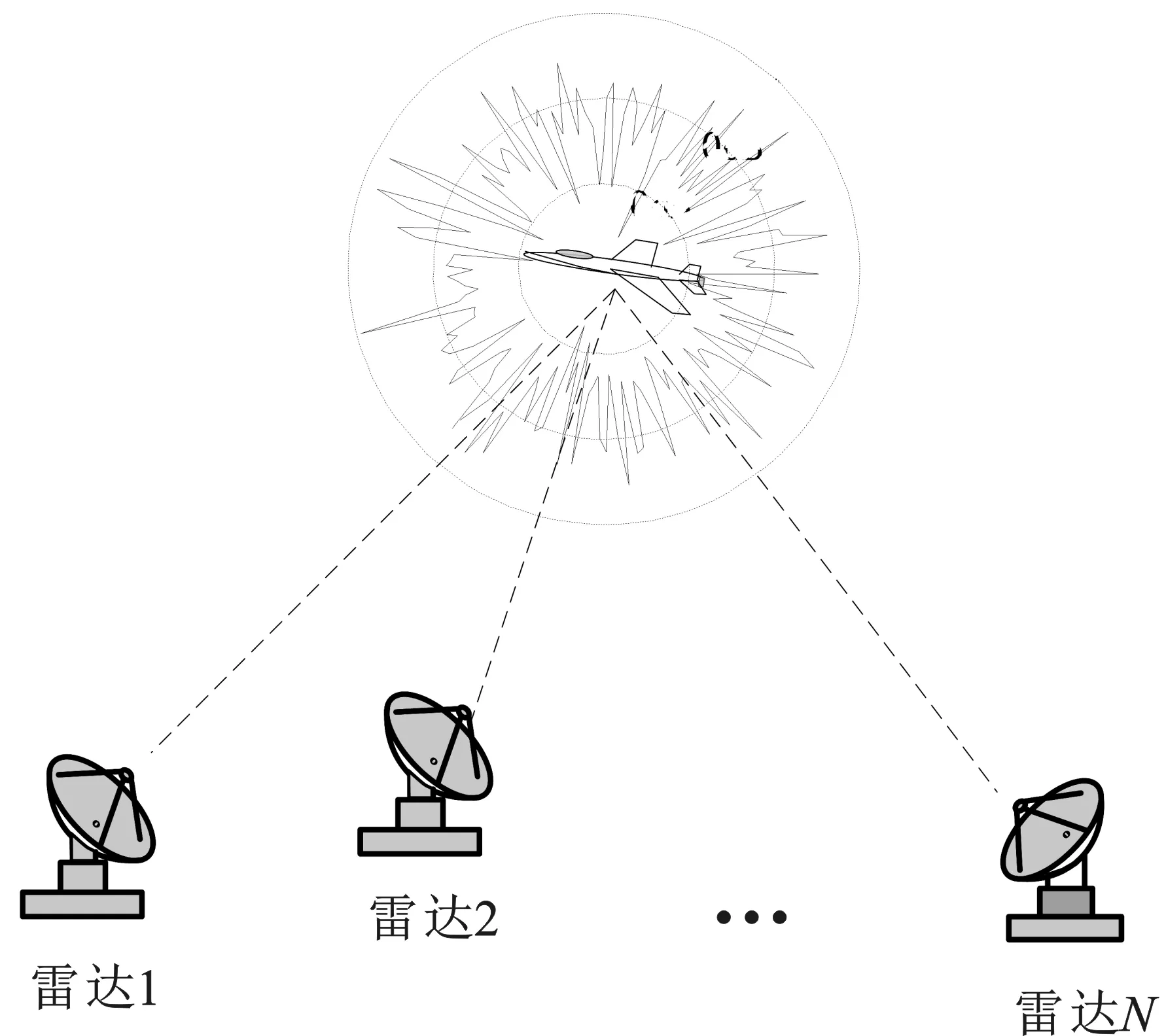
图1 目标空间散射示意图
rk(t,q)=sk(t,q)+jk(t,q)+nk(t,q) ,
(1)
其中,k=1,2,…,K;0≤t≤T,T为一个脉冲重复间隔(PRI)的时间长度;q=1,2,…,Q,Q为脉冲重复间隔的个数。
设RTk为真实目标到发射站和接收站k的距离和,则理想的目标回波信号sk(t,q)可以表示为
(2)

欺骗式干扰与雷达发射信号具有相同的载频,则信号jk(t,q)可表示为
(3)

1.2 样本数据获取
各接收站对接收信号进行脉冲压缩后,由于一个脉冲重复间隔单次采样获取的样本数据量太低,无法准确描述目标特性;文中通过对慢时间域进行检测,得到目标对应距离单元中多个连续脉冲重复间隔,多次采样获取该目标的慢时间复包络序列作为样本数据。则第k个接收站中目标的慢时间复包络序列为
Ak=Bk+Wk,
(4)


最终,在系统融合中心将各接收站检测获取的慢时间复包络序列Ak作为输入样本数据统一通过多隐藏层的网络模型,获取不同接收站对于真假目标多维、本质的特征差异,用于真假目标鉴别。
2 深度神经网络干扰鉴别方法
2.1 深度神经网络学习过程
现有研究多是依据不同雷达站之间复包络序列的相关性作为鉴别特征,即真实目标具有各向异性,欺骗式假目标具有各向同性,从而对目标回波信号进行鉴别。对于真实目标和欺骗式干扰回波的特征分析不够深入,不能充分发挥雷达系统协同探测在空间、时间和频率域内可用资源多、数据内容丰富的特点,提出深度神经网络干扰鉴别方法,将多站雷达系统融合中心获取的多样化目标信息,借助神经网络独特的结构和信息处理方式,对大量目标参数信息进行有监督学习,提取回波信息最多元、最本质的特征,利用其很强的模型学习和特征表示能力对欺骗式干扰进行鉴别。对比传统人工单一特征提取欺骗式干扰对抗算法,深度神经网络模型对多特征协同处理,发掘更深入的真假目标差异,便于不同体制、不同空间视角的雷达组合回波之间的融合处理,提升欺骗式干扰对抗的有效性和普适性。
如图2所示,深度神经网络的干扰鉴别过程主要分为训练部分和测试部分。

图2 深度神经网络鉴别过程
2.2 深度神经网络模型
深度神经网络是基于感知机的扩展,可以理解为有很多隐含层的神经网络,任意层之间是全连接的,每个神经元均可与相邻层的所有神经元相连。如图3所示,网络模型可分为输入层、隐含层和输出层。深度神经网络中隐含层的输出可以自动提取输入信号特征,对于浅层特征,可能是相关性、马氏距离、边缘关系等可以直观描述的特征。伴随着网络层数的加深,探索的是数据更深层的本质特征,这些特征可能不具备直接物理属性,具体意义不能完全被理解,但仍然可以用来对样本进行分类。

图3 深度神经网络模型
由于深度神经网络无法直接处理采样后的复幅度序列,且采样后的复幅度序列中虚部较小,期望为零,所以预处理时将采样数据取实部,作为训练或测试数据输入网络,进行信息处理分类。
信息处理过程可分为前向传播和反向传播算法,前向传播过程构建出若干个权重系数矩阵W,偏置向量b。从输入层开始,将系统中各雷达站检测到的目标或是干扰的慢时间复包络信息作为输入数据,逐层向后与各层权重矩阵、偏置向量进行线性和激活运算。假设第l-1层共有m个神经元,输出为m×1维的向量al-1;第l层共有n个神经元,对应偏置向量是n×1维的bl,则第l-1至l层的线性运算为zl=Wlal-1+bl,其中,权重系数矩阵Wl是n×m维,将线性输出通过激活运算得到第l层n×1维的输出向量al。从输入层逐层计算到输出层,得到目标信号或者干扰信号的二分类输出结果。用矩阵表示,第l层的输出为
al=f(zl)=f(Wlal-1+bl)。
(5)
反向传播是通过调整合适的参数,将所有的训练样本输入网络,使得计算出的输出尽可能地等于或很接近样本真实输出。在进行反向传播算法前,可采用均方误差作为损失函数来度量训练样本计算出的输出和真实的样本输出之间的损失。损失函数可表示为
(6)
采用梯度下降法对损失函数求取最小值,通过目标函数对各个参数的求偏导,迭代更新每一层的参数W和b,最终得到最优的网络参数。对于第l层的未激活函数zl,梯度可以表示为
(7)
得到δl的递推关系式,即可计算出第l层Wl、bl的梯度,更新得到该层的参数为
(8)
其中,α是学习率。网络的学习在权值修改过程中完成,误差达到所期望值时,网络学习结束。
3 数值仿真与结果分析
3.1 参数构建
通过深度神经网络构造特征学习模型,对于不同的目标噪声比(真实目标为信噪比,假目标为干燥比),按相同的参数产生目标和干扰各10 000组(共20 000组)训练样本,1 000组(共2 000组)测试样本,设置接收站K为4个,脉冲重复间隔个数Q为12,则每组样本由48个复幅度数据共同组成。
3.2 鉴别性能仿真结果分析
与文献[10]设置相同参数,仿真结果如表1所示。文中算法鉴别效果明显优于仅利用人工提取相关系数单一特征的鉴别方法,低目标噪声比时性能提升更加明显,当目标噪声比为0 dB,仅一层隐含网络时,真假目标的联合鉴别概率达到90%以上,说明深度神经网络能够充分利用多站雷达系统中各雷达站复幅度数据的未知信息,提取除相关性之外的更多维特征,将多维特征联合处理获取真假目标深层特征差异,从而达到更优的鉴别效果。仿真结果证明了文中提出算法的有效性。

表1 不同网络层数对干扰鉴别效果的影响 %
由于神经网络的层数决定了提取特征的深度,因此改变学习深度来研究算法的性能。对不同隐藏层数的深度神经网络模型进行仿真,网络层数较深时,可以提取更加抽象和本质的特征,增强模型的表达能力,真假目标联合鉴别概率逐渐提升。当隐藏层数到达4层以后,鉴别性能提升不再明显,说明网络已经拥有足够高的网络性能和泛化能力,满足精度要求且结构尽可能紧凑,再过度增加网络层数则可能会带来过拟合现象。
3.3 脉冲数量对鉴别效果的影响
选择神经网络结构为K×Q-250-100-50-10-2,验证脉冲数量对假目标鉴别性能的影响情况。将目标噪声比分别设置为0~12 dB,在不同脉冲数量时,通过已构深度神经网络模型,仿真获取真实目标和有源欺骗式干扰的联合鉴别概率,其中,脉冲重复间隔个数Q的变化范围为2~32,步长为2。
如图4所示,随着脉冲重复间隔的个数增加,鉴别概率提升显著,脉冲重复间隔个数Q到达16之后,鉴别概率趋于稳定。这是由于每组用于干扰鉴别的样本越多,深度神经网络可参考利用的信息量越大,越能有效提升鉴别性能。当信息量满足鉴别要求后,鉴别概率趋于平稳,不再随脉冲重复间隔变化。同时,随着目标噪声比的增涨,鉴别概率提升较为明显,这是因为目标噪声比的增大会降低噪声对回波信号的影响,网络更容易获取真实目标或有源欺骗式干扰的本质特征,从而提升网络鉴别性能。仿真结果表明,当目标噪声比为6 dB,Q大于12时,可保证鉴别概率大于99%,相较于文献[10]中的相同设置参数仿真获取的94%,文中算法对目标的鉴别效果更好。

图4 脉冲数量对鉴别效果的影响
3.4 相关系数对鉴别效果的影响
现有文献均是基于真实目标各向异性,欺骗式假目标各向同性这一特点对回波信号进行区分的。但真实目标的回波相关系数由空间角度差和信号频率差共同决定,若雷达站与目标之间的空间角度差值很小,真实目标的相关性增加,易将其误判成干扰信号而造成漏警。干扰机由于方向图调制、运动带来多普勒频率差异、传播路径不同、各接收通道不一致等因素,会导致各雷达站捕获的干扰信号相关程度降低,从而易造成对于假目标的虚警。
选择神经网络结构为K×Q-250-100-50-10-2,仿真验证相关系数对鉴别性能的影响情况。设置目标噪声比为0 dB,脉冲重复间隔个数为12。在真实目标和干扰信号具有不同相关系数的非理想情况下,通过已构深度神经网络模型,获取真实目标和欺骗式干扰的联合鉴别概率,仿真结果如表2所示。

表2 相关系数对联合鉴别概率的影响 %
仿真结果表明,非理想条件带来的相关系数变化对鉴别概率影响较大,但中文算法依然优于传统算法。文献[15]中欺骗式干扰完全相关,真实目标的相关系数达到0.4时,鉴别概率不足50%;而文中算法在真实目标相关系数为0.4,欺骗式干扰相关系数为0.6,两者均处于不理想状态时,鉴别概率仍保持70%以上,仿真验证了文中算法的普适性。
基于深度神经网络的干扰鉴别算法,有效降低了目标与多站雷达系统由于空间分集而带来的雷达布站限制,缓解了各雷达站距离较近时,复幅度部分相关导致的漏警,以及各雷达站中干扰信号相关性减弱带来的虚警等问题,拓宽了应用过程的边界条件。
4 结束语
笔者提出了一种基于深度神经网络的干扰鉴别方法。通过对多站雷达系统中不同雷达站获取的复包络信息联合处理,利用人工智能的方法对未知数据深入学习,挖掘除相关性之外更多维、更全面、更完善、更深层的特征差异,弥补人工提取特征单一、鉴别效果不理想等问题,有效降低噪声和脉冲数量对干扰鉴别概率的影响,缓解非理想条件下目标回波相关系数对干扰对抗技术的限制,能更好地应对由于目标复幅度部分相关而带来的漏警,以及各雷达站中干扰信号相关性减弱带来的虚警等问题,拓宽了应用过程的边界条件。
