RTK无人机在潮间带地形测量中的应用
2021-04-29何旭涛
胡 勇,何旭涛,徐 辉,周 冰,王 黎
(1.中国电力工程顾问集团中南电力设计院有限公司,湖北 武汉 430071;2.浙江舟山海洋输电研究院有限公司,浙江 舟山 316000)
潮间带是指大潮期的最高潮位和大潮期的最低潮位间的海岸,也就是海水涨至最高时所淹没的地方开始至潮水退到最低时露出水面的范围。由于潮间带处于陆地和海洋的衔换处,水深测量和陆地测量均无法完全覆盖,因此会形成空白地带[1]。作为海陆交互的区域,特别是人员无法实地测量的泥泞地带和船只无法靠近浅滩,其地形的测量一直是测绘工作者的一大难题。
根据潮位时间与潮间带实际地形情况,通常采用2 种测量方式:直换RTK 上滩测量和水下地形测量。在低潮位时,对于露出水面的高滩,人工上滩测量难度不大时,可利用RTK 技术直换上滩测量;在高潮位时,潮间带深水区域可采用DGPS 结合单波束回声测深仪进行水下地形测量。
由于涨潮落潮有时间限制,滩涂泥泞人员无法实地测量,因此需要一种新的测量方法来满足特殊条件下潮间带的测图要求。基于RTK 技术的无人机具有免像控、响应迅速、机动性高、使用便捷、能在危险区域成图等优势,能够完全满足特殊条件下潮间带地形的测量工作。
1 RTK无人机免像控技术原理
RTK 无人机免像控技术是指利用具有RTK 技术的无人机进行航空摄影,以获取高精度的POS 数据的一种方法。
POS 辅助空中三角测量的主要理论技术与方法是将相机曝光瞬间的空间位置和姿态角组成的POS 数据作为附加观测值引入到区域网平差模型当中,利用空中控制替代地面控制,通过整体平差的方式,利用严密的平差模型和算法,解算出影像6 个外方位元素和地面点的空间坐标,最后对其精度进行评价[2]。提高曝光瞬间相机的外方位元素观测精度不仅可以提高空三成果精度,还可以减少外业像控点的数量。一般情况下,实时差分数据的固定解精度可达到cm 级,因而将无人机航测和实时差分RTK 技术相结合能够实时获取曝光点的真实空间位置,使得无人机航测在大比例尺成图中,无须地面像控点的情况下也能达到规范的精度要求,实现各种比例尺测图的内外业完全数字自动化[3]。
传统方式下,布设地面控制点占用大量的人工时间,碰到人员难以进入的区域,很难获取高精度地图数据。由于潮间带宽阔的浅滩与淤泥地带很难进行外业控制点的测量工作,利用RTK 无人机免像控技术可以解决潮间带地形的测量难题。
2 无人机摄影测量数据采集与处理
无人机摄影测量数据采集与处理作业流程主要包括航线设计、数据采集和影像处理3 个步骤。具体作业流程图如图1 所示。
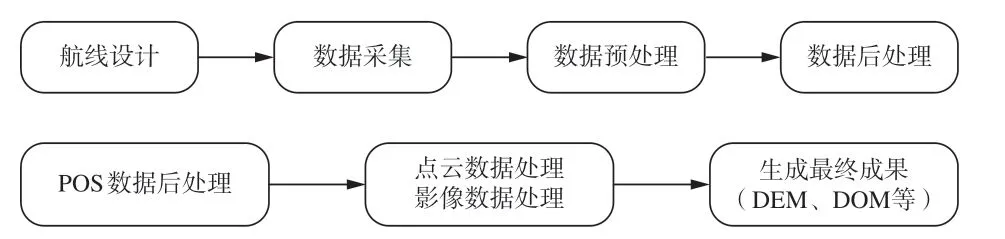
图1 作业流程图
在航线设计之前首先需要对现场进行踏勘,根据测图范围与无人机信号传输范围选择合适的无人机起飞降落场地,并选择合适的天气和合适的时间进行航飞作业。然后使用配套飞控软件进行航线设计,根据测图任务要求,在软件中输入地面分辨率、航向重叠度、旁向重叠度等参数,软件将自动生成航飞路线。无人机根据规划好的航线进行航摄飞行,无人机起飞后将在自动完成计划航线后返航,通过遥控器辅助无人机着陆。在无人机着陆后,检查无人机采集的数据是否符合要求,如相片是否模糊、曝光是否准确、相片是否被云层遮挡等。采集数据满足要求后,即完成数据采集工作。
影像处理主要对外业航飞的飞行相关记录数据和航测影像数据进行处理,生成数字高程模型DEM、高密度三维点云和数字正射影像DOM 等产品,用于数字地形图的制作。目前影像处理软件主要包括Photoscan、Pix4Dmapper 等数据后处理软件,它们能够方便快捷地完成影像处理工作[4]。
影像数据处理流程(如图2 所示)具体如下:以Photoscan 软件为例,将相关数据导入到该软件中,利用SIFT 算子提取每张相片中的特征点并获取其相对应的Descriptor[5]。利用下载的POS 数据对像片进行对齐,利用RANSAC 算法对粗差进行剔除,消除误匹配。利用GNSS RTK 数据图根点坐标,通过共线方程计算出像点物方空间坐标,在逐次平差迭代的过程中,剔除粗差。再经过生成密集点云、生成格网、生成纹理等批处理步骤,最后得到点云数据、DOM 及正射影像等数字产品。利用这些数字化成品,可以使用EPS 或者Virtual Surveyor 等软件进行裸眼立体三维采集,或者使用AutoCAD 描绘的方式将正射影像进行数字化,最终获得符合规范要求的数字线划图。
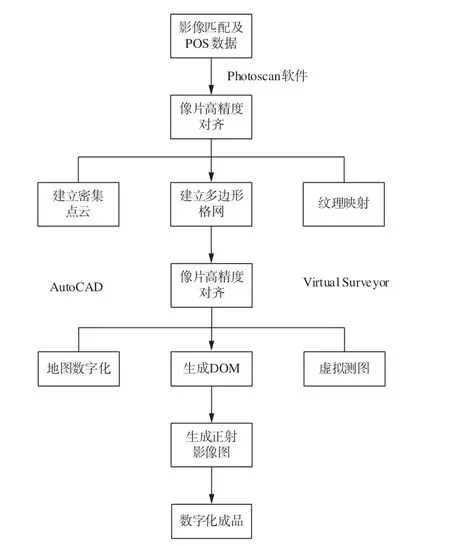
图2 影像数据处理流程图
3 应用实例
大疆精灵Phantom 4 RTK 是一款小型航测无人机,内置实时差分RTK 功能,能够获取到高精度的POS 数据,其水平定位精度为1 cm+1 ppm(RMS);垂直定位精度为1.5 cm+1 ppm(RMS)。为了研究RTK 无人机航测用于潮间带地形测量的精度情况,本文从实际海底电缆工程项目出发,以射阳风电某潮间带测区为例,对大疆精灵Phantom 4 RTK 拍摄的航片进行全自动空三加密,生成点云、正射影像图与数字表面模型。同时,为了验证无控制点的空三加密成果的点位精度,用无控生产的DLG 与实地采集的野外检查点进行精度对比分析。
3.1 测区概况
测区位于盐城市射阳县黄沙港镇,测区面积约1.2 km2。整个测区位于潮间带内,测区内地势平缓,芦苇密布,裸露地区为淤泥和浅滩(见图3),测量船与人员均难以到达。

图3 测区概况
3.2 无人机航空摄影
使用大疆控制器内置GS RTK APP 软件设定航拍区域,规划飞行路线,设置航向重叠度为80%,旁向重叠度为65%,地面分辨率4.6 cm,相对航高为150 m。航飞前应选好无人机起落点位置,一般选在测区中间位置,离最远距离不超过2 km,起落点要求地势平坦无危险障碍物。航飞时应选择合适时间窗口,应选在潮落时间前后,此时潮间带浅滩部分完全露出。航飞前应注意风速对航飞的影响,通常选择风速应不大于4 级。航飞时使用GS RTK APP 软件实时监控飞机的飞行状态,例如电池电量、空中风速、GNSS 状态、传输信号质量以及无人机的实时飞行姿态等。此次航飞共拍摄照片429 张(见图4),实际航向重叠度为80.1%,航线间重叠度为65.2%。
大疆精灵Phantom 4 RTK 提供自架基站RTK 与网络RTK 两种模式,本工程使用千寻网络RTK 为无人机提供实时RTK 数据。千寻网络RTK 所提供平面坐标系统为WGS84 坐标系统,高程为大地高。使用Pix4Dmapper 软件进行处理时,如果需要变换成其他坐标系,需要求解两个坐标系之间的7 参数,将转换后的POS 文件重新导入。

图4 航拍照片缩图
3.3 影像处理
本工程使用Pix4Dmapper 作为影像处理软件,它是一款集全自动、快速、专业精度为一体的无人机航空像片处理软件,在导入航片和经过坐标转换处理的高精度POS 数据后,本地处理中勾选全面高精度处理,并选择导出未畸变图像选项,点击开始就进入全自动运行模式。运行完成后软件弹出质量报告。质量报告主要检查区域网空三误差(见图5)、相机参数优化质量等误差报告。最后得到点云数据、DOM 及正射影像等数字产品(见图6)。

图5 相对定位精度情况

图6 正射影像图与数字表面模型(DSM)
3.4 野外实地测量
利用测区控制点使用RTK 方式对裸露的浅滩进行野外实地测量,共计获取了10 个平面点和33 个高程点作为检查对照点。
3.5 精度分析
大疆精灵Phantom 4 RTK 测量成果与人工实测数据对比成果如表1 所示。
通过表1 可以得出,两种方案所测得的检查点平面位置中误差和高程中误差均优于《1∶500 1∶1 000 1∶2 000 地形图航空摄影测量内业规范》(GB/T7930—2008)的精度要求,即1∶500~1∶2 000 地形图平面位置中误差在平地、丘陵地不大于图上0.6 mm;高程注记点中误差在平地丘陵地不大于0.2 m,并且所有检测点的误差值均小于两倍中误差[6]。通过工程实践表明,RTK 无人机免像控技术不仅完全满足1∶500 大比例尺测图的要求,并且具有操作简单、可行性强及经济效益高等特点。
4 结 语
通过本次潮间带地形图工程项目的实施,验证了RTK 无人机免像控技术能够获取高精度的 POS 数据,在无控制点的条件下可用于测绘1∶500 大比例尺地形图[7]。使用RTK 无人机免像控技术进行测量,其优点具体体现在:

表1 无人机成果与人工实测成果对比表
1)测区适应能力强。对于人员、船只难以到达的潮间带区域,采用RTK 无人机免像控技术测量可以不受限制。
2)测量精度高。理论和实际检验结果都表明,采用RTK 无人机免像控技术测量在无控制点的条件下完全满足测绘1∶500 大比例尺地形图的要求。
3)作业速度快,效率高,具有较高经济效益。为获取高精度测量成果,无人机在作业时应注意:1)需了解测区涨潮退潮时间,在测量窗口时间开始前做好无人机外业航飞准备。
2)大风、下雨、多云等天气情况会制约无人机外业工作,对于小型无人机应选择在风力较小时进行航飞作业。
3)由于无人机信号传输距离的限制,需对测区航线进行合理规划,选择合适的起降点。
4)无人机测图能够保证很高的平面精度,但有时候高程精度相对较低,在实际作业时需使用全站仪、GNSS-RTK 等方式进行外业检测点实测,评定航飞作业精度。
5)影像处理需较高软硬件配置,后处理时间较长,影像处理算法和软件还有进一步提升的空间。