基于风险矩阵的干线公路弯道路段交通冲突风险评估模型
2021-04-28房锐张琪胡澄宇田毕江覃文文
房锐,张琪,2,胡澄宇,3,田毕江,覃文文
(1.云南省交通规划设计研究院有限公司,陆地交通气象灾害防治技术国家工程实验室,昆明650200;2.昆明理工大学,交通工程学院,昆明650504;3.同济大学,道路与交通工程教育部重点实验室,上海201804)
0 引言
近年来,干线公路事故多发引起广泛关注,弯道路段交通安全问题尤为显著。相关统计表明,我国近36%的交通事故发生在弯道路段,事故多发性已严重影响国民经济发展。因此,科学评估干线公路弯道路段(Arterial Highway Bend Section,AHBS)的交通冲突风险,对其进行主动安全防控已经成为当前急需解决的重大现实问题。
国内外学者对干线公路运行风险进行了大量研究:Aliaksei等[1]基于驾驶行为数据建立了一种评价交通风险等级的框架模型;党晓旭等[2]构建广义包络冲突概率评价模型,并评价了多国的道路交通安全等级;邱磊等[3]提出一种基于影响系数确定评价指标权重的方法,评估不同状态下的冲突概率。既有风险评估方法研究中较为成熟[4-7]的有事故率法、灰色关联评价法、专家打分法等。胡江碧等[6]以事故统计数据为基础,建立事故数(率)与交通量、路面状况等因素之间的相关关系,进而预测公路运行风险;杨春风等[7]从道路线形、交通环境等方面出发,建立灰色关联评价模型评价公路交通运行风险。显然,既有干线公路风险评估研究大多通过评估交通冲突概率表征道路运行风险,综合考虑冲突可能性和严重度的公路运行风险评估研究较为鲜见。同时,现有风险评估指标及方法虽然在一定的条件下能够获取较为满意的结果,但对于AHBS交通冲突风险评估而言,由于冲突对应的交通流数据获取难度及以往评估方法的粗放和局限性,不能全面且准确评估AHBS的交通冲突风险。综上,本文综合考虑冲突可能性和严重度,构建AHBS交通冲突风险评估模型,并以元双干线公路为例进行实证。
1 数据采集及处理
1.1 路段概况
本文选取云南省元双干线公路进行数据采集,长期监测其弯道路段交通事故数据及实地采集道路运行数据。该路段全长87.42 km,设计时速60 km·h-1,最大纵坡为7%[8],且月均事故数高达26.56起,属于典型的事故多发路段。
1.2 数据采集与处理
1.2.1 数据采集
为评估AHBS交通冲突风险,获取路段交通流特征数据、道路线型数据及行车环境数据。交通流特征数据由大疆御MAVIC 2 专业版无人机和MetroCount MC5600 气压管式车辆分型统计系统采集得到,道路线型数据由当地交通管理部门提供,行车环境数据由数据采集人员实地记录。为减少其他因素对道路的影响,将采集时间选定为正常工作日且天气晴朗,k81 弯道采集时间为2019年9月26日15:30-18:30,k85 采集时间为27日11:00-14:00。为不影响道路正常运行且采集到清晰的运行数据,将无人机置于道路上方200~250 m,弯道路段的5 个关键断面各放置一台MC 设备,设备位置如图1所示。无人机对两个AHBS 共采集到3 h交通流视频数据,MC 设备同时段采集了6 h 交通流数据。MC 设备可获取的基础交通流数据包括车型、车速、车头时距、车头间距、车辆行驶方向及车辆经过断面时刻等。
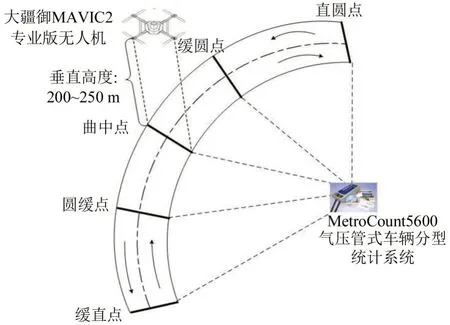
图1 数据采集设备位置分布示意图Fig.1 Data acquisition equipment position distribution diagram
1.2.2 数据处理
由经过培训的观察者根据危险驾驶行为(车辆存在急减速、车距过小、超车等)提取交通冲突片段,并应用荷兰客观冲突技术法对交通冲突进行初步判定,将冲突分为一般冲突和严重冲突,然后采用George2.1 软件识别和追踪片段中冲突车辆,提取冲突车辆行驶轨迹数据,进而获取交通冲突数据。最后,通过无人机与MC 设备匹配时间,确定交通冲突发生时刻,从MC设备中提取弯道各断面交通冲突前5 min交通流基础数据进行计算。无人机视频共提取了2 d 采集时段内累计98 条交通冲突数据,包含一般交通冲突数据34条,严重交通冲突数据64条。
2 方法原理及模型构建
为评估AHBS交通冲突风险,从交通冲突可能性和严重度出发,构建AHBS 风险评估矩阵,获取AHBS交通冲突风险等级。评估框架如图2所示。
2.1 方法原理
2.1.1 RF模型
Random Forest模型用Bootstrap取样法多次有放回的从原数据集中随机抽取样本,为每次抽取的样本决策建模,将建模得到的多个决策树重组得到随机森林,最后根据随机森林分类器对实验样本进行分类和回归。其中,样本未被抽取的概率P为

式中:N为样本的数量。当N→+∞时,每个样本未被抽取的概率为

2.1.2 MFCE法
Multi-level Fuzzy Comprehensive Evaluation(MFCE)法包括以下步骤:
Step 1 构建冲突严重度评价指标集和确定评价等级。首先对冲突严重度影响因素进行梳理,形成递阶层次矩阵,进而确定评价等级。
Step 2 确定指标权重向量。运用层次分析法(AHP)判定选取冲突严重度指标间的相对重要性顺序,得到评价因素的权重为

式中:q为同一层次中指标的总数;wq为q指标对应的权重。
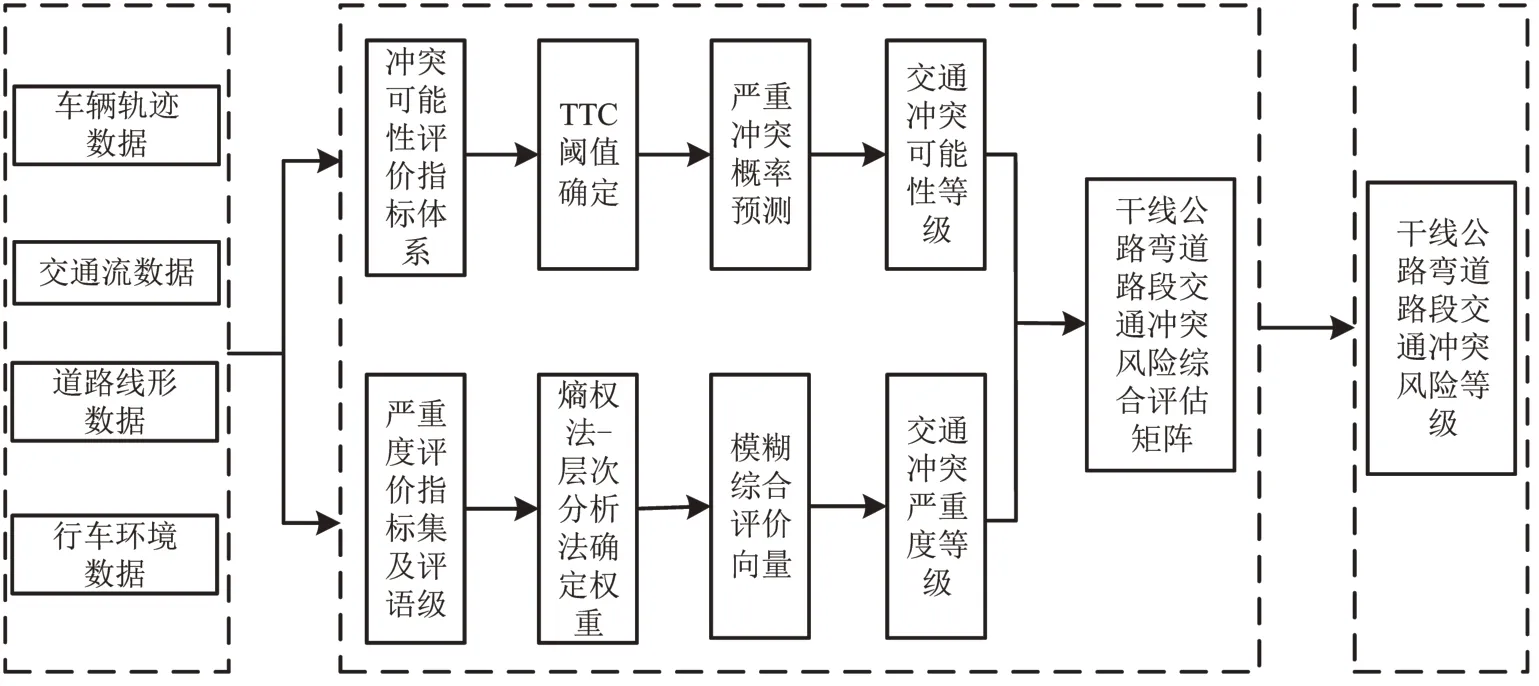
图2 干线公路弯道路段交通冲突风险评估框架Fig.2 A framework for assessing traffic conflict risk on AHBS
Step 3 确定隶属度矩阵。rλx为因素uλ(λ=1~q)对评价等级vα(α=1~x)的隶属度,因素uλ的评价向量为r=[rλ1,rλ2,…,rλx] 。由q个评价向量组合得到冲突严重度隶属度矩阵为
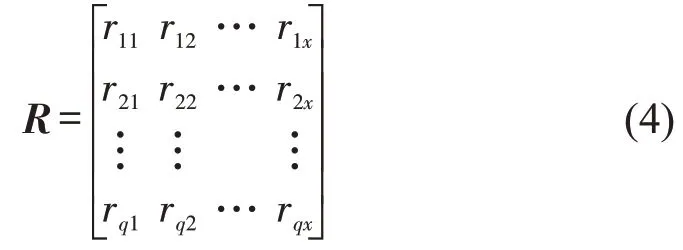
式中:λ为评估因素的序号;x为总评价等级对应的数量;α为评估等级的序号。
Step 4 对MFCE 的冲突严重度结果向量B进行合成。向量B由权重向量W与隶属度矩阵R合成得到,即
2.2 AHBS交通冲突模型构建
2.2.1 交通冲突可能性评估
(1)交通冲突可能性评估指标选取
①交通冲突判别指标
根据既有交通冲突风险研究成果及本文研究目的,选取TTC(Time to Collision)为交通冲突判别指标。当后车速度大于前车,根据当前车速和轨迹,两车将会发生碰撞,碰撞时间为冲突至碰撞的时间差,即

式中:ZTTC为第z辆车的碰撞时间(s);xz-1(t)为t时刻z-1车(前车)的位置;xz(t)为t时刻z车的位置;lz-1为z-1 车的车长;Vz(t)为t时刻z车的地点速度;Vz-1(t)为t时刻z-1车的地点速度。
②交通流特征参数指标
结合AHBS 交通流特征及既有相关研究[6],选取平均车头时距(AHD)、平均车头间距(AHS)、货车混入率(TMR)、进弯断面流量(QIC)、路段交通流密度(TFD)等19 个指标进行分析,采用RF 提取累计贡献度超过90%的指标进行建模,最终选定AHD、AHS、TMR、QIC、摩托车混入率(MMR)、冲突位置平均速度(CAV)等6个指标。
(2)TTC阈值的确定
由于AHBS 的行车环境和运行速度与其他路段存在较大差异,TTC 阈值也有明显区别。因此,在进行可能性预测前划分AHBS 交通冲突类型。将采集得到的严重冲突和一般冲突分别以0.2 s 为间隔进行均等分类计算,采用交通工程学领域内常用的85%位累积频率确定其阈值。冲突类型及对应阈值如表1所示。
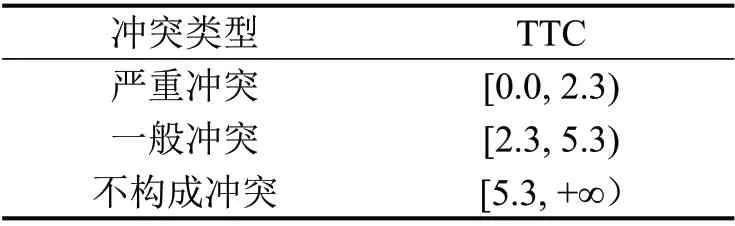
表1 交通冲突指标TTC阈值Table 1 TTC threshold of traffic conflict index
根据所选输入参数,基于RF 建立AHBS 交通冲突可能性预测模型,并利用python软件完成模型构建。首先,采用极值法对样本进行归一化处理;然后,按8∶2 划分训练集和测试集,对严重冲突风险概率进行预测。
(3)AHBS交通冲突可能性等级
为获取AHBS 的交通冲突可能性等级划分阈值,以研究路段采集得到的80%交通冲突数据为基础,运用RF预测交通冲突风险概率,运用模糊C聚类法聚类冲突可能性输出结果,得到AHBS交通冲突风险可能性的等级划分阈值,具体等级划分如表2所示。
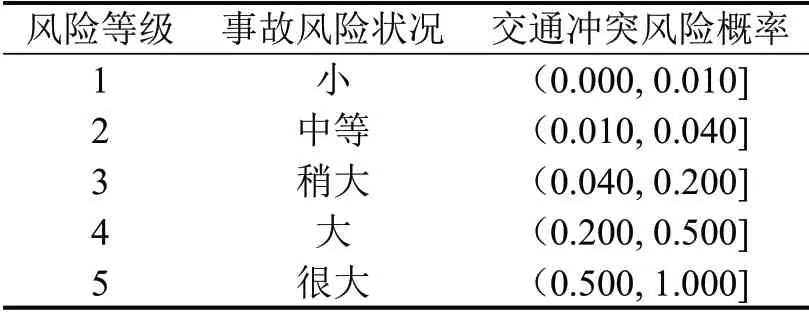
表2 交通冲突风险概率等级Table 2 Probability grade of traffic conflict risk
2.2.2 交通冲突严重度评估
在交通冲突可能性预测的基础上,采用MFCE确定交通冲突严重度。首先,确定交通冲突严重度评价指标体系;然后,用AHP 结合熵权法(EVM)计算指标权重;最后,结合MFCE 评价分析交通冲突严重度。
(1)交通冲突严重度指标体系
综合现有冲突严重度度量指标,并结合AHBS的交通流、道路线形、行车环境等数据,选取TFD、车速变异系数(CVS)、AHD、TMR、非机动车混入率(NVM)、平曲线曲率(FCC)、纵坡坡度(LSD)、是否有接入口(CE)等8 个指标,建立AHBS 交通冲突严重度评估指标体系,如图3所示。
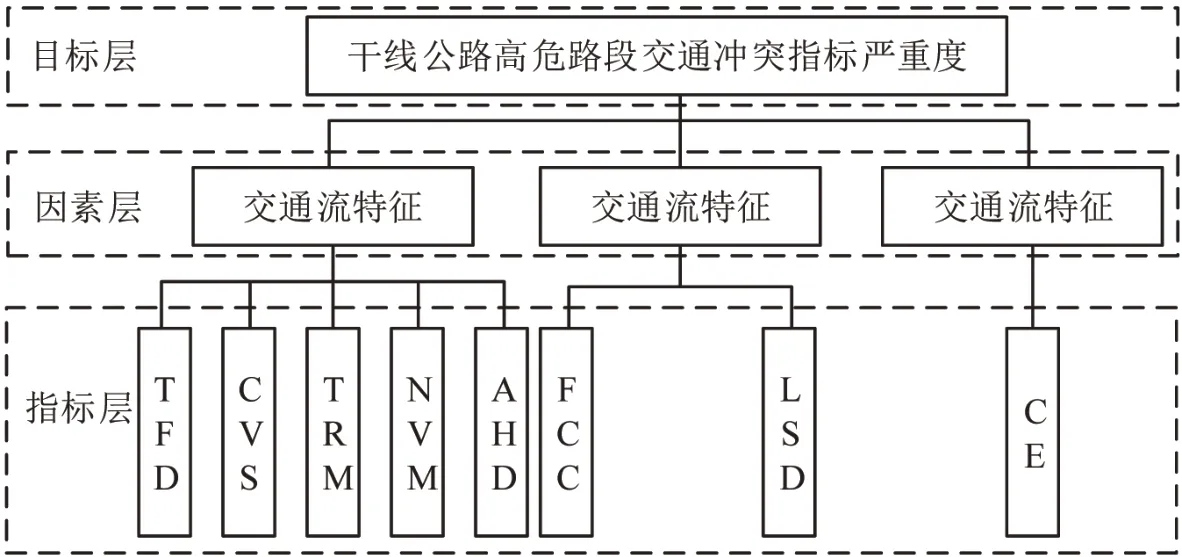
图3 干线公路弯道路段交通冲突严重度评估体系Fig.3 Severity evaluation system of traffic conflict on AHBS
(2)冲突严重度评估指标权重确定
①指标权重的计算方法
采用AHP 法从主观层面计算指标权重,运用EVM 法从客观层面计算指标权重,进而对两种方法所得权重加权得到冲突严重度评估指标的最终权重。
运用EVM法计算选取指标权重,其原理为

式中:γij为第i个研究单元第j个指标的极值化归一值;φij为第i个研究单元的第j个指标值;k为系数;m为研究单元总数;ej为指标j的熵值;dj为指标j的熵值冗余度;yj为指标j的权重;n为安全等级评价中涉及到的指标总数。
②指标综合权重的确定
基于EVM 法和AHP 法确定TFD、CVS、AHD、TMR、NVM、FCC、LSD、CE 等指标权重,交通冲突严重度评价各指标权重如图4所示。
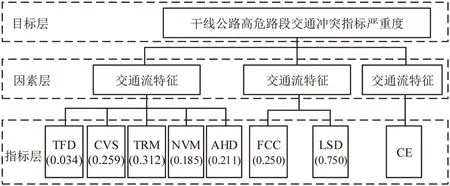
图4 交通冲突严重度评价各指标权重Fig.4 Each index weight of traffic conflict severity evaluation
(3)评价指标与评价等级对应法则
为获取隶属度矩阵,确定评价指标与评级等级的对应关系。运用K-means聚类分析,对AHBS的交通冲突和交通流进行聚类分析,确定TFD、CVS、AHD、TMR、NVM 等指标的评价等级阈值。结合既有研究[8]和《公路项目安全性评价规范》(JTG B05-2015),确定FCC、LSD、CE 等指标与评价等级的对应关系。交通冲突严重度评价指标与评价等级对应关系如表3所示。
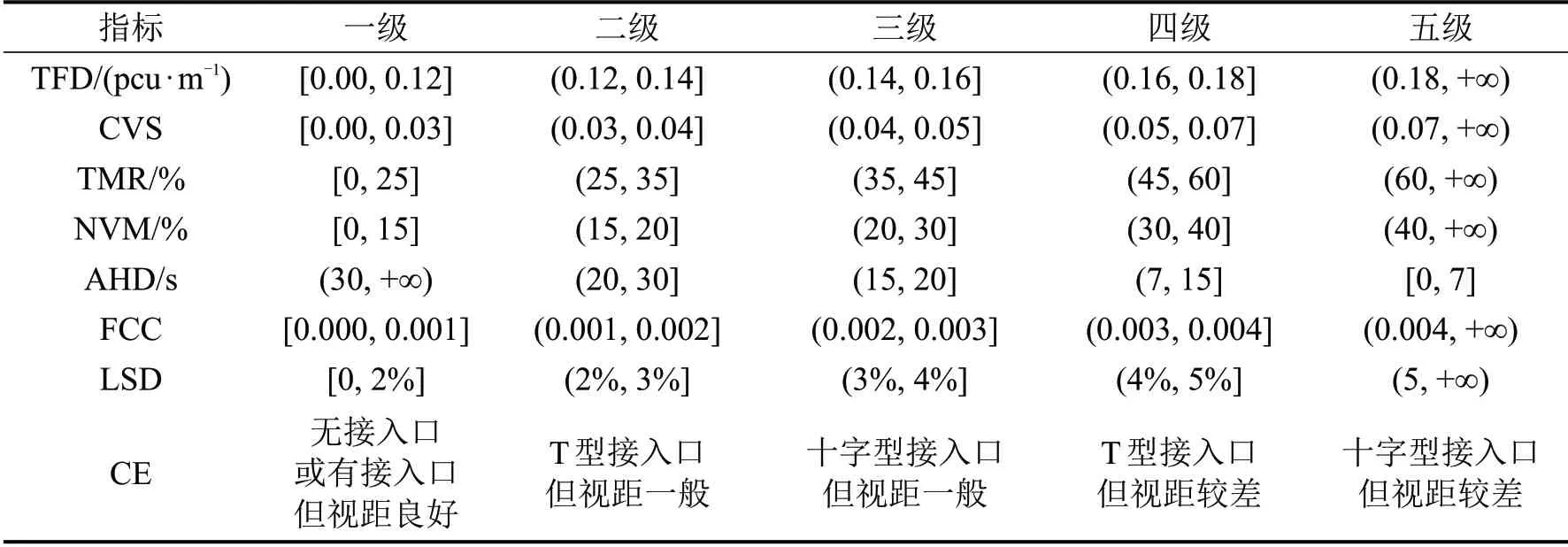
表3 交通冲突严重度指标评价准则Table 3 Criteria of traffic conflict severity index evaluation
(4)AHBS交通冲突严重度等级
结合既有交通冲突风险分类研究,将冲突严重度等级分为5 类,具体等级划分如表4所示。按照MFCE评估流程,将权重向量与隶属度矩阵进行合成,得到冲突严重度的结果向量,向量中最大元素的序号即对应冲突严重度等级。
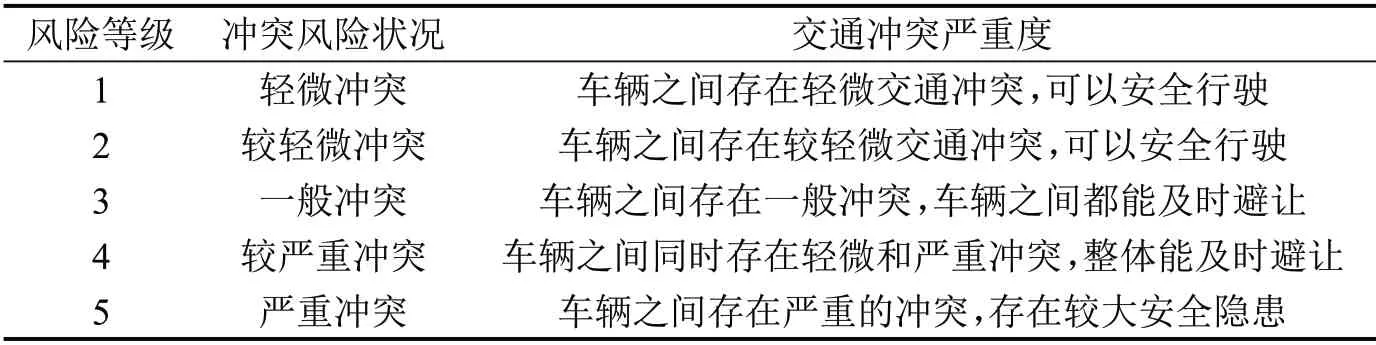
表4 交通冲突严重度等级Table 4 Conflict severity level of traffic conflict risk
2.2.3 AHBS交通流冲突风险矩阵
为获取AHBS交通冲突的综合风险等级,根据交通冲突可能性和冲突严重度分级判定交通冲突风险等级,将综合冲突等级划分为5级,Ⅰ~Ⅴ级等级越高,综合冲突风险越大,具体如表5所示。
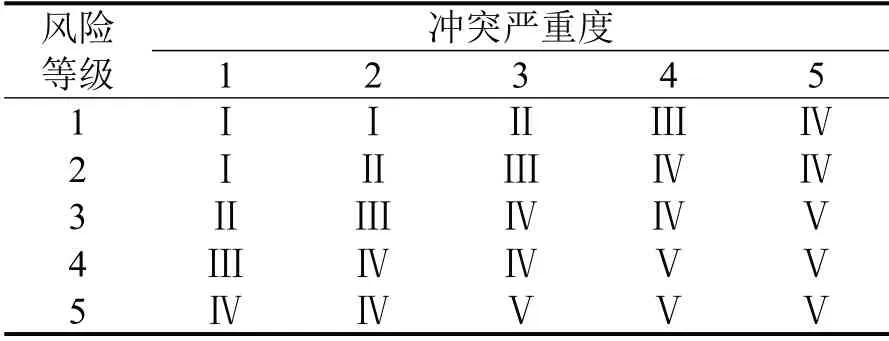
表5 交通冲突风险综合评估矩阵Table 5 Comprehensive assessment matrix of traffic conflict risk
3 实例路段交通冲突风险评估
3.1 模型预测结果分析
利用RF 按8∶2 划分训练集和测试集,获取测试集中为严重冲突的风险概率,模型精度达到84.21%。对应表2确定的冲突风险概率等级,即可获得冲突可能性等级,具体如表6所示。
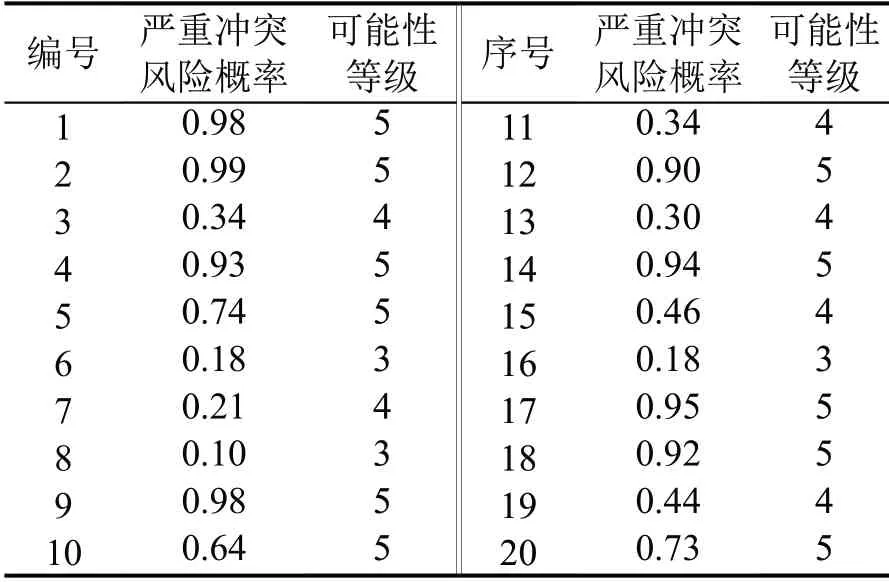
表6 测试集严重冲突风险概率及可能性等级Table 6 Risk probability and its level of serious conflicts in test suite
3.2 确定交通冲突严重度等级
基于实例路段交通流数据、道路线形数据和行车环境数据,对测试集的交通冲突进行严重度评估。对照评价指标和等级对应法则,根据最大隶属度原则得到测试集冲突数据的冲突严重度等级,如表7所示。
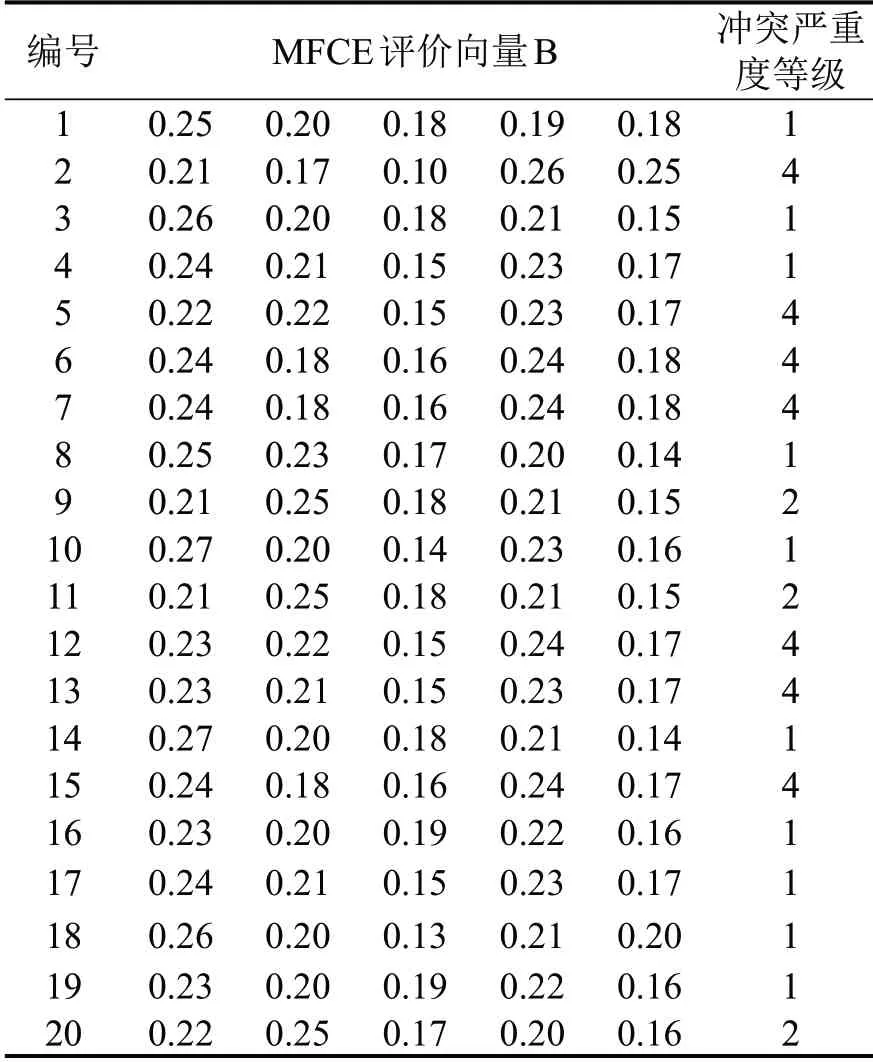
表7 实例冲突严重度等级Table 7 Conflict severity level of example
3.3 确定路段交通冲突风险等级
基于冲突可能性评估模型及冲突严重度评估模型输出结果,对照表5,获取测试集的交通冲突综合风险等级,如表8所示。
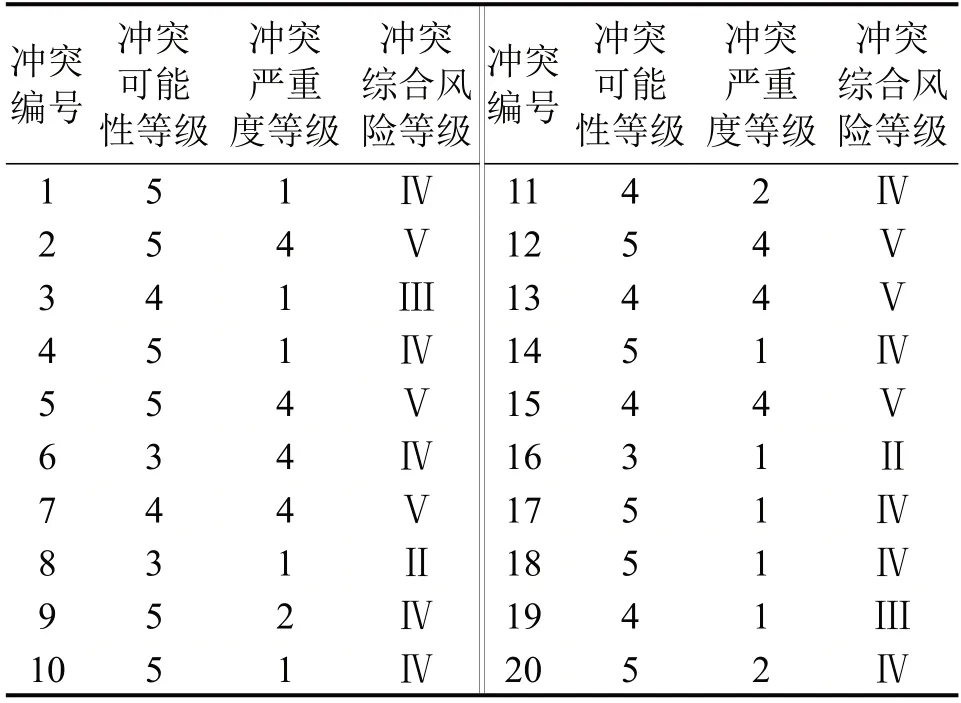
表8 干线公路弯道路段冲突风险评估等级Table 8 Grade of conflict risk assessment on AHBS
4 结论
本文以AHBS交通冲突为研究对象,基于无人机和MC 橡胶气压管传感器实地采集道路运行数据,运用RF模型、MFCE分别建立冲突可能性的概率预测模型和冲突严重度的等级评估模型,进一步构建冲突风险评估矩阵确定AHBS 冲突风险等级。以云南省元双干线公路为例,对模型的准确性和实用性进行验证。本模型可在评估其他AHBS冲突风险中根据道路数据对模型系数进行标定后可开展应用和分析,为干线公路交通事故整治提供理论依据。