网联环境下信号交叉口车速控制策略及优化
2021-04-28刘显贵王晖年洪经纬郝雷
刘显贵,王晖年,洪经纬,郝雷
(厦门理工学院,机械与汽车工程学院,福建厦门361024)
0 引言
车辆产生的能耗排放对交通环境产生重大影响。在信号交叉口频繁出现的车辆怠速和启停工况,使交叉口成为道路交通网络中能量消耗和污染物排放的重点区域[1-3],因此,对交叉口区域的车辆能耗排放进行优化研究具有重要意义。通过车-车、车-路间通信,车辆可以根据车辆位置、运行状态信息及交叉口信号相位配时信息,得到减少车辆停车次数和能耗排放,提升通行效率的运行策略[4-5]。国内外学者研究了信号交叉口节能减排的生态驾驶车速控制策略,KAMAL 等[6]对有人驾驶车辆与自动驾驶车辆混行交通环境,提出根据前方交叉口信息和对前方车辆的预测确定车辆最优速度策略,验证策略有效性的同时发现生态驾驶车辆的存在提升了交通流整体效率。孟竹[7]提出通过车辆状态与前方信号灯信息分析车辆运动轨迹,以油耗最小为目标函数求最优车速引导轨迹,仿真表明,可使燃油消耗减少10%以上。
当前,对于车联网环境下信号交叉口处速度控制策略的研究主要集中在考虑交叉口信号状态和车辆自身运行状况[8],通过经验以减少停车次数为目标,而对车辆实际通过交叉口时油耗排放的综合效益,以及路网中其他车辆与受控车辆间相互影响的研究鲜有报道[9]。本文基于交通流中车辆的相互影响,优化控制场景划分方法,利用多目标遗传算法得到使能耗排放及通行时间最小的目标车速;进行VISSIM和MATLAB联合仿真;使用微观排放模型MOVES测算排放;并利用底盘测功机结合排放测试系统完成实车实验,验证诱导优化具有较好的实际效果。
1 基于目标车速关联的油耗排放模型建立
本文交通环境为有人驾驶车辆与自动驾驶车辆混行,网联车辆通过车联网通信系统获得路网中车辆位置、运动状态及信号灯相位配时信息。设立以下假设:
(1)研究范围为单一交叉口区域,不受相邻交叉口影响;
(2)无超车和变道行为;
(3)受控车辆在安全的情况下完全遵循控制策略的引导轨迹;
(4)路面平坦,忽略坡度对车辆的影响。
生态驾驶控制系统架构如图1所示。本文控制方法为对交通流中的车辆速度轨迹进行逐一控制,车辆控制阶段选用基于速度-加速度的VTMicro 模型测算油耗排放。VT-Micro 模型在进行能耗排放测算时使用单位效率(Measure of Effectiveness,MOE)概念,MOE计算公式为

式中:MOEe为t时刻的车辆能耗(L ·s-1)或排放率(m g·s-1);i为速度幂指数;j为加速度幂指数;v为t时刻的车辆速度(km·h-1);a为t时刻的车辆加速度(m ·s-2);为速度幂指数为i、加速度幂指数为j时的回归系数,取值参考文献[10]。
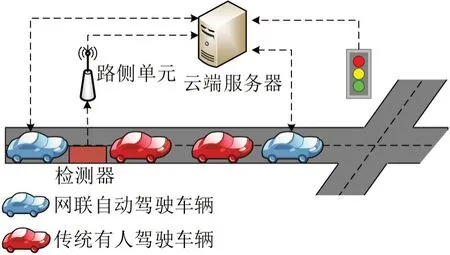
图1 生态驾驶控制系统架构示意Fig.1 Schematic diagram of eco-driving control system architecture
将信号交叉口路段分为速度控制路段和速度恢复路段。生态驾驶车辆通过信号交叉口示意如图2所示。
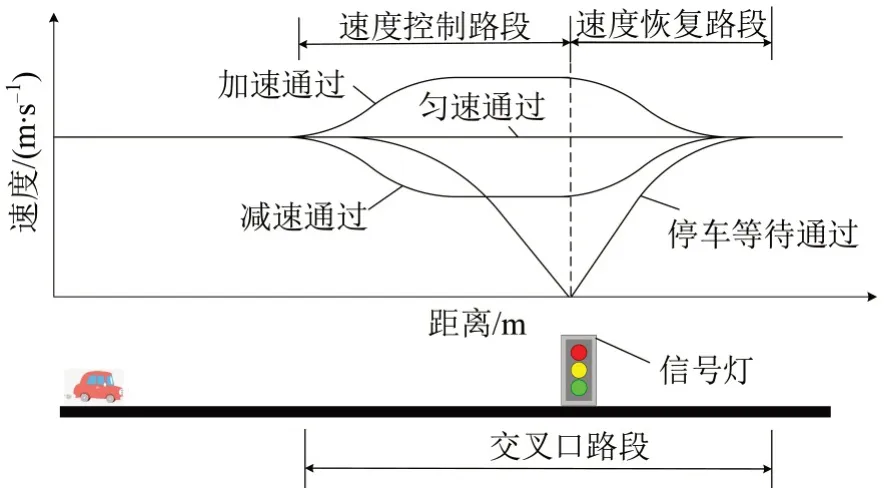
图2 生态驾驶车辆通过交叉口示意图Fig.2 Schematic diagram of ecological driving vehicle passing through intersection
通过测算交叉口路段(总长为S)车辆油耗排放,评估控制策略对车辆在整个交叉口路段的影响。
匀速通过场景下油耗Fb为

式中:Tb为车辆以初始速度匀速通过交叉口路段所用时间,即

式中:v0为车辆进入控制路段时的初始速度(m·s-1)。
根据文献[10]拟合的CO2、NOX排放MOE 回归系数,求得匀速通过场景下CO2排放量ECO2,b和NOX排放量ENOx,b。
加速通过场景包括:获取引导速度后的加速阶段,达到引导速度后的匀速阶段,通过交叉口后的速度恢复阶段,以及行驶完交叉口路段的匀速阶段。总通行时间Ta为
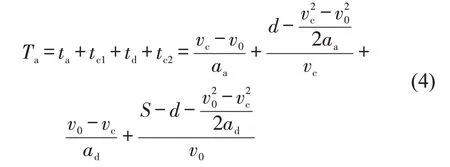
式中:ta为加速阶段时间;tc1为交叉口上游的匀速阶段时间;td为速度恢复段时间;tc2为交叉口下游的匀速阶段时间;vc为目标车速(m·s-1);d为速度控制路段长度(m);aa为加速度,值为正;ad为减速度,值为负。
加速通过交叉口区域的总油耗Fa为
根据文献[10]拟合的CO2、NOX排放MOE 回归系数,求得加速通过场景下的CO2排放量ECO2,a和NOX排放量ENOx,a。
同理可得,减速通过场景下总通行时间Td为
减速通过交叉口区域的总油耗Fd为
根据文献[10]拟合的CO2、NOX排放MOE 回归系数,求得减速通过场景下的CO2排放量ECO2,d和NOX排放量ENOx,d。
2 生态驾驶诱导控制策略构建
当车辆进入速度控制路段时,车辆根据各类信息判断以何种方式通过交叉口。假设最低引导车速为vmin,道路最高限速为vmax,t0为对车辆进行引导的时刻,tg,k为第k个信号周期绿灯开始时刻,tr,k为第k个信号周期红灯开始时刻,k=1,2,3,…,∞,即一个信号周期内tg,k~tr,k时间段为绿灯。
车辆以初始速度从进入控制路段匀速行驶至交叉口停车线的时间为

车辆加速、减速通过交叉口时,首先调整车速至引导车速,再匀速行驶。故从进入控制路段到停车线的时间为
式中:vc为目标车速(m·s-1)。
交通流优化轨迹如图3所示。
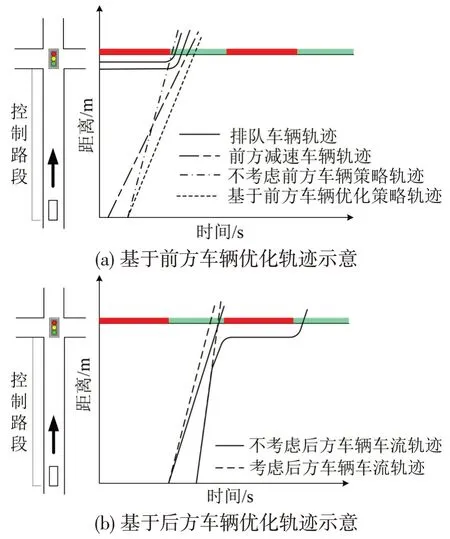
图3 交通流优化轨迹示意Fig.3 Schematic diagram of traffic flow optimization trajectory
图3(a)为基于前方车辆优化轨迹示意图。前方车辆可能会对生态驾驶车辆产生阻碍作用,迫使生态驾驶车辆停车怠速或二次减速。因此,存在前方车辆干扰时优化参数如下。
(1)行驶距离。交叉口前存在排队队列及前方减速车辆时,车辆行驶距离将改变为从控制线到车队队尾距离。因此,存在前方车辆时,车辆通过控制线时刻到可通行时刻行驶的距离为

式中:nq为排队车辆数;l为车辆停车距离与车辆长度之和(m);nd为前方减速通过车辆数;dn为跟车距离(m)。
(2)可通行时间。存在前方排队车辆时,信号灯变为绿灯相位后,还需等待排队车辆消散才可通行,即可通行时间为

式中:tx为每辆车起步消散的时间。
图3(b)为基于后方车辆优化轨迹示意图。引导车辆加速通过时,可能被前车阻碍,使车辆被迫减速无法在当前绿灯相位通过交叉口。因此,当阻碍后方车辆时参数优化如下。
(1)行驶距离。当存在阻碍后方车辆的情况时,车辆应为后方车辆预留一定的空间用于在红灯亮前通过路口。

式中:da为车辆通过控制线时刻到红灯开始时刻行驶的距离(m);nh为后方受阻碍的车辆数。
(2)到达停车线时间。当存在阻碍后方车辆时,车辆应将到达停车线时间提前为

考虑前后车辆影响后,将基于交通流优化的引导场景划分为以下4种。
(1)匀速通过。匀速行驶到达停车线时信号灯为绿灯相位,排队车辆已消散,不存在阻碍后车情况,则引导车辆匀速通过。
(2)加速通过。当不满足匀速通过条件,而加速行驶可使受控车辆不停车通过停车线,则引导车辆加速通过。
(3)减速通过。当不满足匀速、加速通过条件,而减速行驶可使车辆在绿灯相位且排队车辆消散后到达停车线,则引导车辆减速通过。
(4)停车等待。以上3种条件均不满足时,车辆无法通过速度调整不停车通过交叉口,车辆将继续行驶到停车线停车等待。
将交通流优化参数代入式(8)和式(9),结合信号灯配时信息,得到引导场景划分数学模型如表1所示。
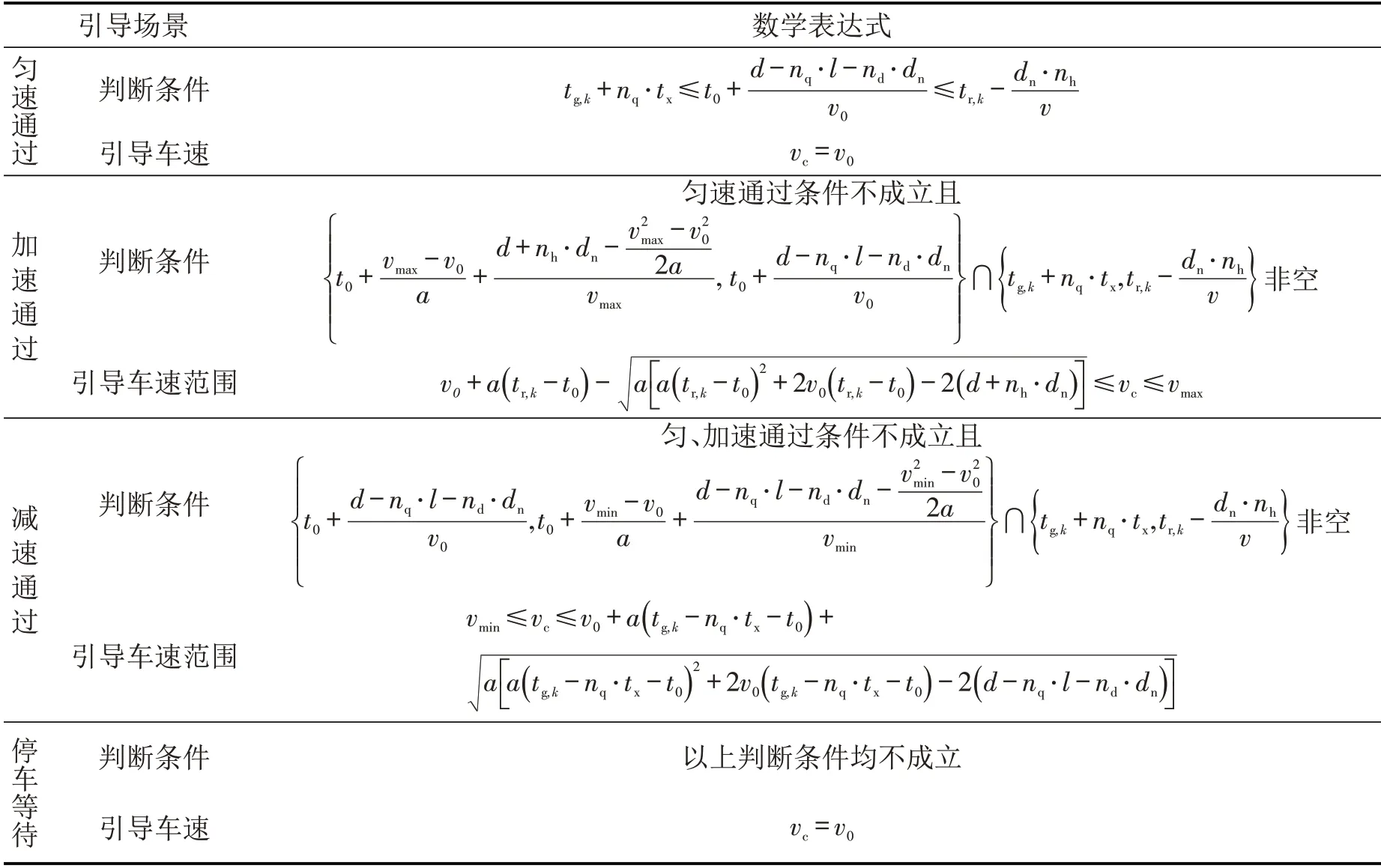
表1 引导场景划分数学模型Table 1 Mathematical model of guiding scene partition
3 基于多目标遗传算法优化
本文以油耗、排放和通行时间最小化为目标进行多目标优化。目的是在单车效率和系统效率之间进行权衡。为更好体现各优化目标优化效果,将匀速通过场景定义为基准场景。建立的目标函数为
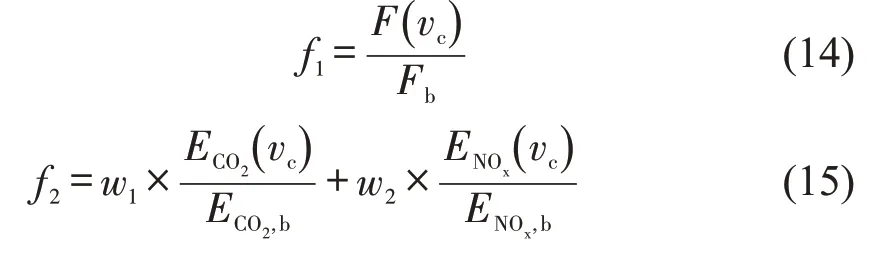

式中:f1、f2、f3分别为与油耗、排放和通行时间相关的目标函数;F(vc)为加速或减速通过交叉口区域的油耗;ECO2(vc)为加速或减速通过交叉口区域的CO2排放量;ENOx(vc)为加速或减速通过交叉口区域的NOX排放量;T(vc)为加速或减速通过交叉口区域的通行时间;w1、w2为权重系数,取值均为0.5。
多目标优化生态驾驶目标车速时,除保证车速满足交通法规要求外,还需要保证车辆能够尽量不停车通过交叉口,故在加速引导场景下的约束条件为

减速引导场景下的约束条件为

多目标问题与单目标问题的一个不同点是由于存在多个相互冲突的目标函数,获得的解无法直接进行优劣判定。多目标遗传算法具有遗传算法的优点,在多目标优化问题中将得到一个满足所有约束条件和各个目标函数的Pareto解集。NSGA-II(Non-dominated Sorting Genetic Algorithm II)算法采用快速支配排序法,根据个体在种群中的支配关系对种群进行循环分层,通过支配层序号进行个体间优劣度评估,使计算的复杂度大大降低;通过拥挤度的计算和比较,使非支配解均匀分布在Pareto前沿上;引入精英策略,保留历代中的优良个体,有助于加快收敛速度。基于NSGA-II 算法的信号交叉口目标车速求解步骤如下。
Step 1 输入能耗排放模型相关参数,能耗排放计算公式、约束条件及遗传算法运行相关参数。
Step 2 确定种群大小,初始化种群P。
Step 3 求解目标函数适应度值。将种群中每个个体在目标函数上对应的值求出,不满足约束条件的个体将目标函数值极大化,使之成为劣解,在后续操作中被淘汰。
Step 4 对种群中个体进行非支配排序,确定每个个体的非支配层,对同一非支配层中的个体进行拥挤度计算。
Step 5 根据非支配排序和拥挤度计算结果,选择精英个体进行交叉变异操作,产生子代种群。
Step 6 将父代种群与子代种群合并,形成新种群,再根据非支配排序和拥挤度选择个体成为新一代父代种群。
Step 7 通过遗传操作产生新一代种群,循环运行Step 6、Step 7,直到达到结束条件,保存当前Pareto非支配解集。
Step 8 从解集中选择1 个精英个体作为全局最优解,完成车辆通过信号交叉口目标车速优化。
NSGA-II算法流程如图4所示。图中,Gen为进化代数。
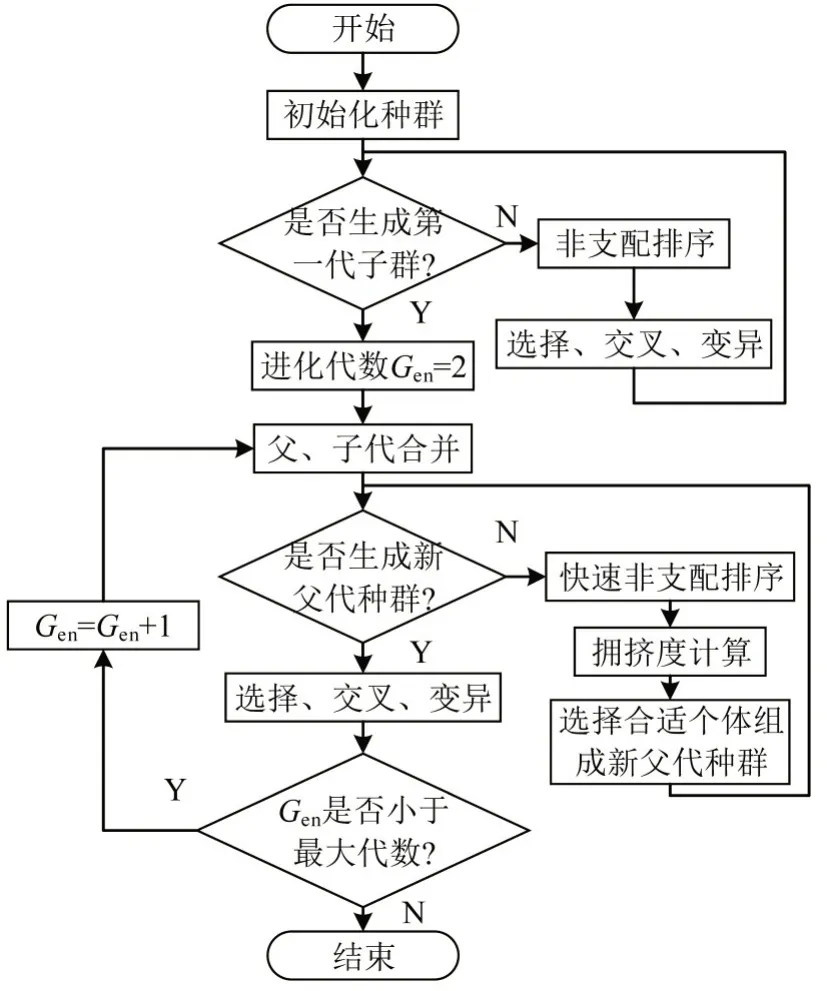
图4 NSGA-II算法流程Fig.4 Flow chart of NSGA-II algorithm
4 仿真分析
以VISSIM2020为仿真平台,利用MATLAB连接VISSIM-COM进行VISSIM二次开发。MATLAB通过COM接口可获取VISSIM路网中的仿真、评价信息,通过控制策略计算出相应的目标引导速度并输出到路网中的期望速度决策点,实现对路网中车辆的控制,并将VISSIM仿真输出的逐秒速度、加速度等数据整理输入至MOVES模型,评估系统能耗排放。仿真平台示意如图5所示。
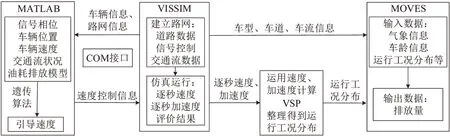
图5 仿真平台搭建示意Fig.5 Schematic diagram of simulation platform construction
仿真参数设定如下:研究路段为一车道直行路段,在道路中设置若干车辆计数器。信号周期设置为60 s,黄灯期间车辆可通行。跟车模型采用Wiedemann74模型。搭建不同道路饱和度、算法渗透率和控制策略场景进行仿真实验,根据城市交叉口通行能力计算公式得到本文绿信比下的道路通行能力约为500 veh·h-1。3种不同控制策略为:①不采用控制策略,即0 算法渗透率,②不考虑交通流的控制策略;③基于交通流优化控制策略。在600仿真秒后开始记录数据。每组仿真采用不同随机种子运行5 次,试验结果为5 次仿真平均值。其他仿真参数如表2所示。
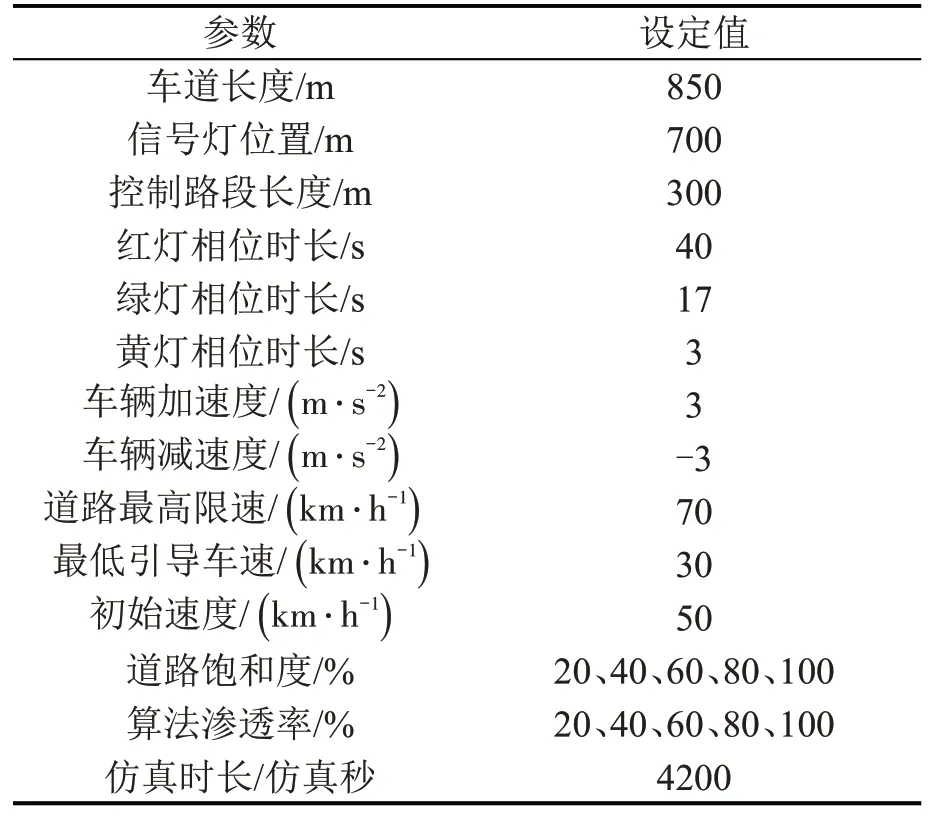
表2 仿真参数Table 2 Simulation parameters
为更好表达生态驾驶控制策略实施效果,仿真结果数据为速度控制路段及速度恢复路段共450 m道路的车辆数据。其中平均速度仿真结果最大方差约为1.2,表明各次重复仿真实验结果较为接近。不同交通场景及控制策略下的车辆平均速度,如图6所示。
由图6可知,在中、高渗透率场景下,生态驾驶引导策略具有较好的出行效益,车辆平均速度大于无控制策略场景。采用基于交通流优化控制策略场景,平均速度大于未考虑交通流的速度控制策略场景;与无控制场景相比,在高渗透率场景下平均速度提高5.8%~13.8%。
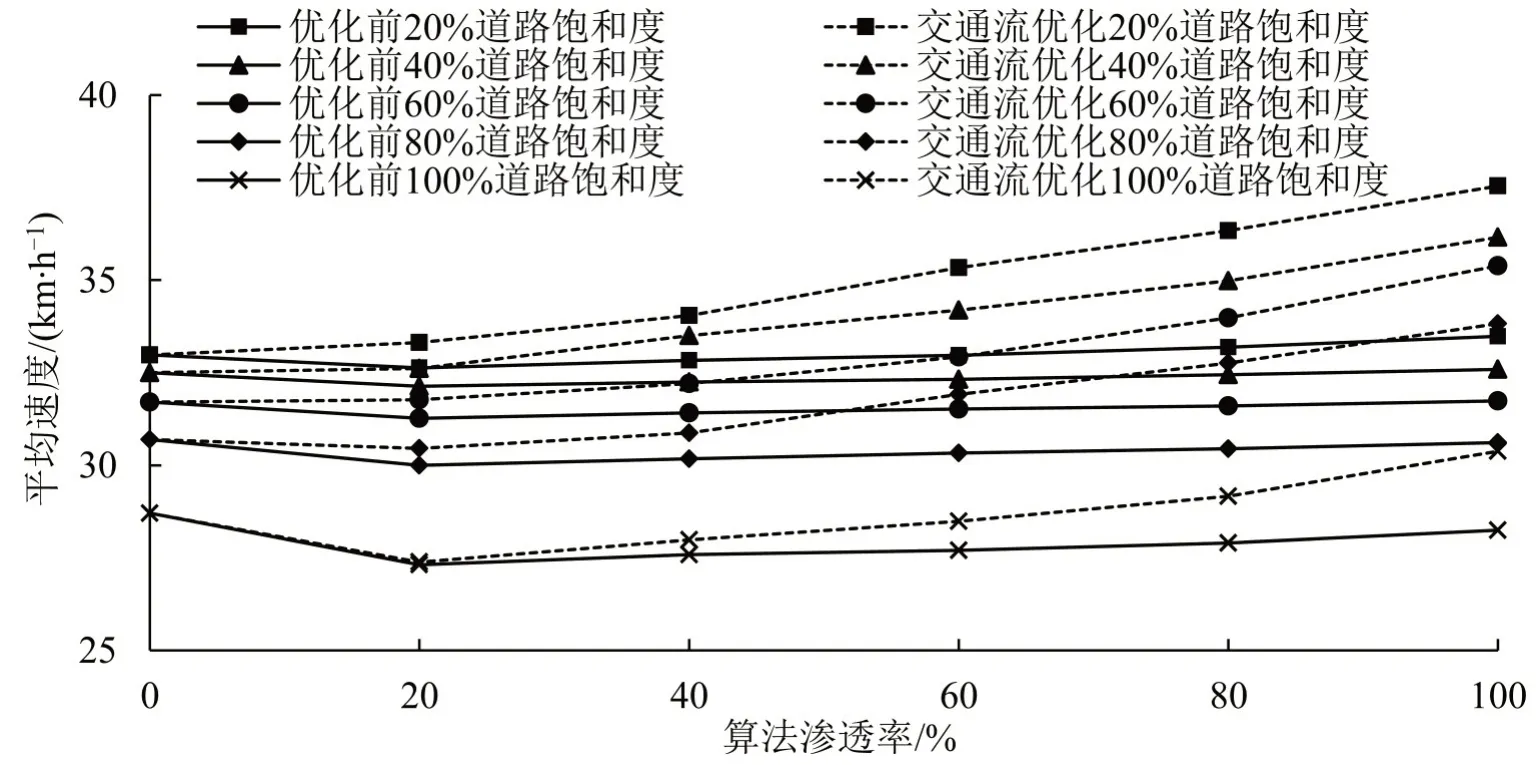
图6 不同交通场景下的平均速度Fig.6 Average speed under different traffic scenarios
道路饱和度为20%,算法渗透率为100%时不同控制策略下道路中车辆的比功率(Vehicle Special Power,VSP)区间分布如图7所示。
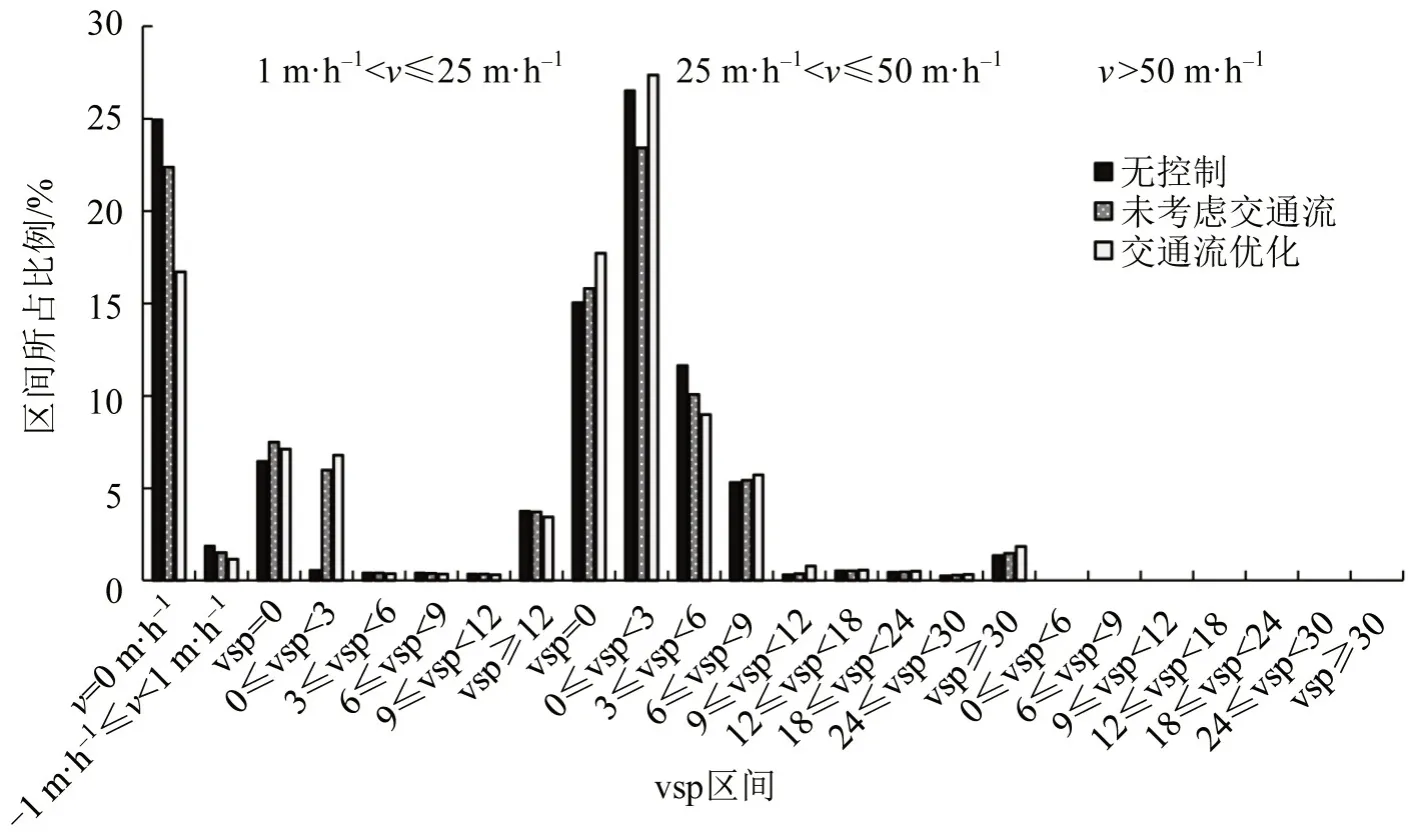
图7 不同控制策略下的VSP区间分布Fig.7 VSP interval distribution under different control strategies
由图7可知,与未使用控制策略相比,未考虑交通流的速度控制策略使高能耗率的停车怠速行为减少的同时能耗率最低的中速巡航也减少,而能耗率次优的低速巡航增加;基于交通流优化策略使停车怠速减少33%的同时低能耗率的中速巡航比例上升18%,从而使车辆运行状况得到改善。
如图8所示,不同曲面分别为基于交通流优化后与未考虑交通流策略时,在不同算法渗透率与道路饱和度下的能耗与各污染物排放量的拟合曲面。基于交通流优化后,除CO外,在各道路饱和度及算法渗透率下,其他能耗排放指标均有所下降,即各曲面均位于优化前的下方;在算法渗透率为0的曲面上形成的线,即为无控制场景下不同道路饱和度的能耗排放;在高算法渗透率、低道路饱和度下,基于交通流优化策略与无控制场景相比,能耗及N2O、NOx、HC、CH4排放分别减少6.6%及12.2%、4.0%、6.3%、2.9%,CO排放增加约2.5%,CO增加主要是加速工况比例上升导致的。
总体而言,未考虑交通流状态的控制策略在低道路饱和度、高算法渗透率场景下能取得一定效果,但在高道路饱和度时效果变差,甚至可能恶化交通,而基于交通流优化的控制策略在各道路饱和度下均能对交通产生良好效果。
5 实车实验
为验证生态驾驶车速控制策略的准确性并评价节能减排效果,对车辆通过信号交叉口的能耗排放进行实车验证。为保证实验安全性及准确性,实验车辆在底盘测功机上运行,并采用自动驾驶机器人控制车辆运行不同控制策略下的速度轨迹,排放分析系统实时采集排放数据。为更好地表达控制策略对车辆通过信号交叉口的影响,分别选取基于交通流优化策略在加速及减速引导场景下的速度轨迹,及相同交通状况下采用未考虑交通流控制策略和无控制策略时的车辆速度轨迹各2条。图9为测试设备连接示意图。

图9 测试设备连接示意Fig.9 Test equipment connection diagram
不同控制策略及引导场景下的能耗排放对比如表3所示。
由表3可知,基于交通流优化策略与未考虑交通流策略相比,各指标均有所下降;与无控制策略时相比,油耗及CO、CO2、PN 排放量分别降低53.1%及47.6%、50.4%、39.8%,NOx排放量增加13.6%,其中,NOx排放增加主要是由于减速通过场景下低速巡航工况比例上升。实车实验与仿真实验结果存在一定差距,主要是仿真实验结果为道路中所有车辆能耗排放,实车实验结果为生态驾驶单车轨迹能耗排放,使得工况比例变化不同导致。
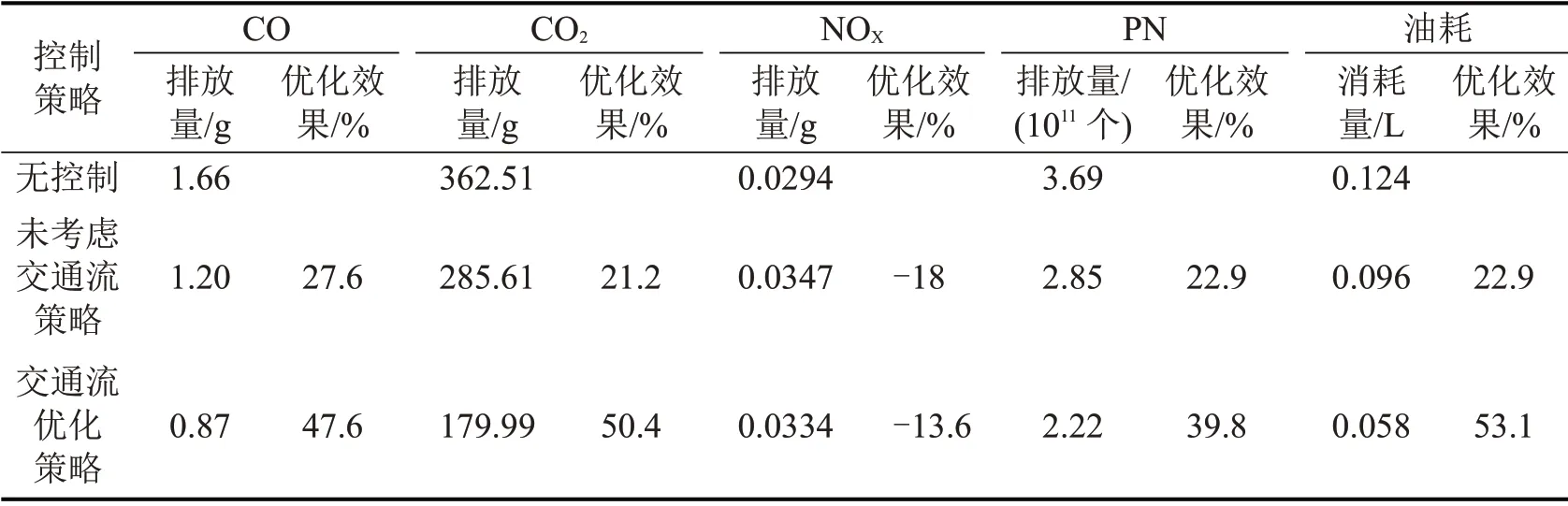
表3 不同控制策略下的能耗排放对比Table 3 Comparison of energy consumption and emission under different control strategies
6 结论
本文通过分析交叉口下网联自动驾驶车辆速度引导方法,基于交通流中其他车辆对生态驾驶车辆的影响,对生态驾驶引导场景划分方法进行优化,求得可使车辆不停车通过交叉口的速度范围,以油耗排放和通行时间为目标函数,道路限速及不停车通过车速为约束条件进行多目标优化,求得最优引导速度,建立信号交叉口下生态驾驶速度控制策略。仿真及实验结果表明,生态驾驶控制策略能够有效改善车辆通过信号交叉口的油耗排放,提高道路交通效率;并且基于交通流优化的控制策略优于未考虑交通流的控制策略。本文生态驾驶速度控制策略为网联自动驾驶车辆通过信号交叉口提供有效可行的技术方案。