3D可视化技术联合术中超声定位技术在腹腔镜内生型肾癌保留肾单位手术的应用
2021-04-28许志斌郭毛毛王江平
许志斌,郭毛毛,卞 浩,王江平
(泰州市人民医院泌尿外科,江苏 泰州 225300)
肾癌是泌尿系统的常见疾病,外科手术是早期肾癌的首选治疗方法。肾脏内生型肿瘤是指完全被正常肾实质包绕的肿瘤,目前术中定位的方法主要采用的是腹腔镜超声定位。3D 可视化技术依靠患者CT原始数据进行建模,能在体外精准再现器官形态,显示肿瘤与肾脏的空间结构,更能辨识与肿瘤毗邻的重要血管和集合系统,防止术中误伤。2018 年1 月至2019 年6 月我院共收治4 例完全内生型肾肿瘤患者,我们采用3D可视化技术联合术中超声定位技术,行腹腔镜下保留肾单位手术,均取得良好效果。
1 对象与方法
1.1 临床资料本组共4例,男3例,女1例。年龄36~65岁,平均49.5岁。左肾肿瘤3例,右肾肿瘤1例。肿瘤直径1.9~4.0 cm,平均3.0 cm。TNM 分期均为T1aN0M0。R.E.N.A.L.评分8~10分,平均9.0分。术前血肌酐52.4~92.6 μmol·L-1,平均70.9 μmol·L-1。eGFR 为86.5~111.6 mL·(min·1.73 m2)-1,平 均101.8 mL·(min·1.73 m2)-1。患者术前影像学检查诊断均提示为肾脏恶性肿瘤。术前所有患者均签署3D可视化模型制作同意书及手术同意书。
1.2 3D 可视化模型制作通过西门子双源螺旋CT 按照操作规范对患者肾脏进行多期扫描,获取平扫期、动脉期、静脉期及肾盂分泌期的DICOM 原始数据,采用MIMICS 软件制作肾脏、肿瘤、血管、肾盂输尿管等多种组织的3D 模型,再应用MAGICS 软件进行精加工得到最终3D可视化模型(图1)。
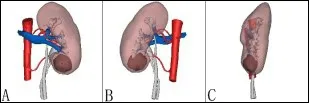
图1 3D可视化模型
1.3 手术方法4 例患者均采用经腹腹腔镜手术。全麻,健侧折刀卧位,按照常规操作游离肾动脉及肾脏,术中将肾脏与3D 可视化模型进行比对,找到肿瘤的大致位置,然后采用腹腔镜超声探头贴于肾脏表面进一步明确肿瘤大小及深度,在超声探头的引导下用电勾在肾脏表面标记肿瘤投影边界。根据3D 可视化模型,2 例选择阻断肾段动脉,2 例阻断肾动脉主干,剪刀沿标记线剪开肾包膜,锐性钝性结合游离肿瘤,同时根据3D 可视化模型的提示,注意避开大血管和集合系统。采用2-0 倒刺线分层缝合肾脏创面,完成缝合后经仔细检查创面无活动性出血,取出标本,放置引流管,缝合切口。
1.4 术后随访观察术后恢复情况,有无出血、漏尿,术后3个月行eGFR 检查,术后3个月、6个月、12个月返院行肾功能及胸部、腹部CT检查。
1.5 统计学方法采用SPSS 19.0 统计软件处理数据,试验结果以表示。
2 结 果
采用3D 可视化技术联合术中超声定位,在4例患者行腹腔镜保留肾单位手术中,我们均准确定位出内生型肾癌的切开位置,并完整切除肿瘤,定位时间6~11 min,手术时间86~145 min,平均110.5 min,术 中 热 缺 血 时 间19~27 min,平 均23.2 min,术中失血量为85~230 mL,平均173 mL,术中肉眼见肾癌标本边缘整齐,肿瘤假包膜完整,肿瘤无破损,术后病理结果均为肾透明细胞癌,无切缘阳性。术后未出现大出血、二次手术、感染等并发症。术后住院5~8 d,平均6.2 d。术后腹腔引流管留置2~4 d,平均3.5 d。术后3 个月eGFR 为(93.2±7.5)mL·(min·1.73 m2)-1。术后3 月、6 月、12 月随访,血肌酐为(85.5±22.3)μmol·L-1、(76.1±18.9)μmol·L-1、(68.2±16.5)μmol·L-1。胸部、腹部CT检查未发现肿瘤局部复发及远处转移。
3 讨 论
肾癌是泌尿系统的常见疾病,外科手术是局限性肾癌首选治疗方法[1]。随着微创手术技术的发展,目前腹腔镜保留肾单位手术已经成为T1期肾癌治疗的金标准[2]。肾癌多呈外生性生长,凸出肾脏表面,在行腹腔镜保留肾单位手术中易于显露。内生型肾癌是一种特殊的肾癌生长形式,肿瘤被正常肾实质包绕且不突出于肾表面[3]。术中如何精准切除内生型肾癌并减少副损伤是腹腔镜下保留肾单位手术较大的难点[4]。由于术中无法显露肿瘤轮廓,所以很难精准切除肿瘤[5]。因此,如何确定肿瘤的大小、位置及与周围重要血管、组织的毗邻关系及切除范围显得尤为重要。
目前主流的定位方法是术中超声定位[6]。术中超声定位可确定肿瘤在肾表面的投影边界及肿瘤距肾表面的距离,对术中精确切除肿瘤具有十分重要的作用,但超声定位的办法不能十分精准的确定肿瘤与周围大血管及集合系统的毗邻关系,存在误伤的风险。
近年来,3D 打印技术在生物医学领域发展迅速,目前已有研究者通过3D 打印患肾模型,精准再现局部解剖结构,为保留肾单位手术的精准实施提供有效辅助[7-8]。也有研究者提出基于3D 打印模型的四点定位法,应用于腹腔镜下内生型肾癌的术中定位[9]。但此方法利用导管等工具测量标记,且依靠术者主观肾脏表面标记点,可能存在较大的误差[10]。此外,3D 打印必须依靠专业的3D 打印机,存在复杂的技术及材料限制。且对于内生型肿瘤,受限于打印材料的不透明性,并不能较好的显示肿瘤与周围组织的毗邻关系。
3D可视化肾脏内生型肿瘤模型,可从任意角度进行透视观察内部结构,精准再现肿瘤及肿瘤与周围组织的毗邻关系,对于高度复杂的肿瘤,术前可通过3D可视化模型进行手术模拟,初步制定手术路径、肿瘤的切除范围及手术中需要注意规避的重要血管及集合系统等,术前解剖位置了然于心,术中可将模型与实际术野进行比对,可有效减少手术所需要的时间,降低手术风险[11]。
此外对于没有医学知识背景的患者而言,也更容易进行术前沟通和手术方案展示。医生能在手术前确定肿瘤位置、大小及与周围血管的毗邻关系,患者能清楚知晓手术的潜在风险,这对于降低医患矛盾具有很重要的意义。
综上所述,目前在腹腔镜下精准的切除内生型肾癌仍是保留肾单位手术的难点,将3D可视化技术与传统的超声定位技术相结合,具有肿瘤定位准确、切除完整、围手术期并发症发生率低等优点,是一种安全可行的治疗方法,值得推广。本研究病例数较少、随访时间较短,该方法的远期疗效尚有待于长期随访观察及大样本随机对照研究来证实。
