MQ25-35门座起重机防风装置功效分析
2021-04-27谢新鹏刘相超
谢新鹏 刘相超
龙口港集团有限公司
1 引言
门座起重机(以下简称门机)是港口装卸作业的主力设备,由于其外形结构高大、迎风面积较大、风力作用中心高度较高,易受台风、突发性阵风等强对流天气影响,引发起重机械位移滑动、倾翻等灾难性事故,造成巨大的经济损失,甚至人员伤亡。因此,研究、优化门机防风措施功能及作用机制意义重大[1-2]。鉴于门机型号多、结构复杂、防风装置不统一,以MQ25-35门座起重机为研究对象,研究防风装置的防风能力和防风机制[3-4]。
2 门机防风装置情况简介
起重机结构高、自重大,一旦被风吹动将会产生很大惯性,难以停止,导致连锁机损和人身伤害事故[5-6]。因此门机在设计时,根据风载荷作用实际,配置多种防风装置,主要是为了防止门机整机失稳倾覆和沿轨道滑移。
2.1 MQ25-35门机基本情况
MQ25-35门机为普通四连杆式臂架、圆筒式门架的门座起重机,最大幅度35 m,起升高度轨道上28 m(吊钩)、轨道下16 m,轨距L=10.5 m,迎风面积S=262.9 m2,风合力作用点距离地面高度H=19.8 m,自重G=430 t。
MQ25-35门机拥有制动器、防爬器、防风拉索、地锚(锚板)、防风楔块等防风装置。门机防风一般分两种情况,即工作状态的防风和非工作状态的防风。工作状态下制动器、防爬器、防风楔块发挥作用;非工作状态下,门机移动至指定位置锚定,此时所有防风装置均发挥作用[7-8]。
2.2 制动器
惯性制动器是目前国内门机上应用最广的行走制动器,通过对电动机轴的制动起到对门机行走主动轮的制动作用,在非工作状态下也可实现对主动轮的制动。在使用过程中及时更换制动器摩擦片、调整间隙,就可以取得较好的制动效果。惯性制动器无电气元件,使用安全可靠,安装、维护简便,摩擦材料磨损均匀,结构紧凑,无漏液、漏油。MQ25-35门机共有8套惯性制动器,主要技术参数见表1。

表1 行走机构制动器主要技术参数
2.3 防爬器
MQ25-35门机共有4套防爬器(也称防跑制动器),位于行走台车之间。一旦行走轮有对轨道的相对运动,行走轮爬上楔面,门机自重力对楔块产生向下的正压力,在该作用力下,防爬器下面的齿板与轨道之间产生较大的水平摩擦力,阻止门机移动。正常情况下,在门机正压力(自重力)和摩擦力的作用下,门机停止移动,超过安全临界点后门机将会滑动。静止状态下,防爬器不起作用。防爬器的效果取决于防爬器设计、使用维护和轨道(沉降)平整度。
2.4 防风铁鞋
港口常用的防风楔块(俗称铁鞋),由于其构造简单、重量轻、易于维修等优点,广泛应用于港口门机防风,但与防爬器不同的是需要人工手动操作。MQ25-35门机共有8个防风铁鞋,对向塞垫至行走轮下方。防风铁鞋作用原理与防爬器相同,车轮向前滚动时,爬到铁鞋上,与铁鞋成为一体在轨道上滑行,将车轮与轨道的滚动摩擦变为滑动摩擦,因而摩擦力大幅度增加。在门机不移动的情况下,防风铁鞋也不起作用。
2.5 防风拉索
MQ25-35门机共有4根防风拉索。防风拉索是指用钢丝绳(铁链)、花篮螺丝、卸扣等,将门机机体与码头的锚定座链接起来,将门机固定在封车位置,避免在风力作用下门机移动。防风拉索具有直接可靠、效果易于检查和防风能力强等优点,其缺点是必须将门机停到指定位置,加固时间长。
2.6 防风锚定
MQ25-35门机共有2套地锚。防风锚定与防风拉索同样具备直观可靠、效果易于检查和防风能力强等优点,其缺点是必须将门机停放到指定位置,需要准确定位,耗时也较长。同时在锚板与地锚槽之间有间隙,只有当锚板碰到地锚槽,该装置才发生作用,若门机防风拉索拉紧,门机无法移动的情况下,该装置不起作用。
3 门机抗倾覆能力计算与分析
根据规定,港口起重机非工作状态下的抗风能力应不小于55 m/s,工作状态下的抗风能力应不小于35 m/s。[9]
假设门机完全处于静止状态,无任何防风装置起作用。当风速为55 m/s,风向完全垂直轨道,则风压为:
Q=0.613V2=1 854.325 Pa
(1)
式中,Q为风压,Pa;V为风速,m/s;则门机受到最大的倾覆力为:
F=1.2QS=1.2×1 854.325×262.9=585.002 kN
(2)
式中,F为门机受到最大的倾覆力,kN;Q为风压,Pa;S为门机迎风面面积,m2。
门机受到的倾覆力矩为:
T倾覆=FH=584.9×19.8=11 583.04 kNm
(3)
式中,T倾覆为门机受到的倾覆力矩,kNm;H为门机高度,m。
稳定力矩为:
T稳定=Mg(L/2-X)=18 752.3 kNm
(4)
式中,T稳定为稳定力矩,kNm;M为门机的质量,kg;g为重力加速度,m/s2;L为门机宽度,m;X为门机垂直于轨道方向时的重心偏移量,m。
门机转向、幅度不同,X取值不同。式中X为门机最不利时的重心偏移量,一般情况下变幅最大时X为0,考虑合理范围内门机幅度最小时X取值为0.8 m。
安全系数为:
σ=T稳定/T倾覆=18 752.3/11 583.04=1.619 (5)
从上述计算可知,在静态(且风力完全垂直于轨道方向)情况下,即使受到55 m/s的强风,门机也不会倾覆。但分析国内外门机倾覆事故,绝大部分事故是门机在风力作用下或人为原因发生移动,巨大的滑移惯性冲击造成的。因此,门机防风的重点应是防止风力吹动门机沿轨道滑动,尤其考虑门机在装卸作业过程中遭遇强阵风侵袭的防范。
4 门机抗水平滑移力的计算与分析
4.1 制动器防风能力F1
依据表1行走机构制动器主要技术参数,可以计算出1个制动器工作时,制动车轮所受到的最大制动力,即1个制动器能提供的防风能力F0:
F0=2TI/D
(6)
式中,F0为制动器能提供的防风能力,kN;T为制动器的制动力矩,kNm;I为行走机构的总传动比;D为行走轮直径,m。
经计算1个制动器能提供的的防风能力为:
F0=2×458×60.97/0.55=100 kN
(7)
每个制动器控制2个行走轮,若制动器工作时,行走轮恰好滚动,每车轮最小的轮压应为:
F轮压=F0/(2μ)
(8)
式中,F轮压为车轮轮压,kN;μ为制动轮和轨道之间的摩擦系数,参照《起重机设计规范》(GB/T3811-2008),取0.14。[10]
计算可得:
F轮压=100/(2×0.14)=357 kN
(9)
当制动车轮的轮压小于357 kN时,制动力矩足够大,车轮发生滑动而非滚动。该门机共32个行走轮(其中16个主动轮,16个从动轮),可以计算出每个车轮轮压为134 kN,远小于使车轮滚动的最小轮压,主动轮与轨道之间是滑动摩擦。因此,制动器对应车轮的最大静摩擦力即为该制动器的防风能力F1:
(10)
式中,F1为制动器防风能力,kN;N1为制动轮(主动轮)数量;N为全部行走轮数量。
计算可得:
F1=16/32×430×0.14=30.1 t=301 kN
(11)
4.2 防爬器防风能力F2
防爬器能提供的最大静摩擦力,即防风能力F2:
(12)
式中,F2为防爬器防风能力,kN;N2为门机移动方向上,爬上楔面的行走轮数量;N为全部行走轮数量;μ1为制动轮和轨道之间的摩擦系数,取0.25。
F2=2/32×430×0.25=6.7 t=67 kN
(13)
该计算的前提条件为门机在风力的作用下,行走轮爬上了楔面重心抬高。而实际上,行走轮爬上楔面或对楔面产生正压力,需要移动一短距离,一般在5~10 mm;且由于风向、风力的复杂多变性,再考虑风的上拔力,实际数值应比该数小。[11]
4.3 防风铁鞋防风能力F3
铁鞋塞至门机行走台车主动轮下方时,根据制动器F1计算,主动轮与轨道是滑动而非滚动,门机主动轮无法爬上铁鞋楔面,防风铁鞋不能发挥防风功能,该铁鞋防风阻力基本为零。
铁鞋塞至门机行走台车从动轮下方时,受风载荷影响,门机沿轨道移动,从动轮滚动爬上铁鞋楔面,将从动轮的滚动摩擦变成滑动摩擦,增加起重机自身的摩擦阻力。铁鞋使用时,应规范塞至门机行走台车从动轮下方,防爬器也应设置对从动轮作用。[12]
MQ25-35门机共配备8个防风铁鞋,对向塞垫至从动轮下方。当门机滑移时,门机移动方向上4个铁鞋发挥防风功能。防风铁鞋的防风能力即受到的最大静摩擦力,取防风铁鞋与轨道之间的摩擦系数为0.1计算得:
F3=4/32×430×0.1=5.375 t=53.75 kN
(14)
4.4 地锚防风能力F4
地锚的抗风能力即为锚板的水平组合力,MQ25-35门机有2处防风锚定,共4块锚板,锚板的水平组合力F4为:
F4=4S锚板F剪切应力=4×30×180×128
=2 764 kN
(15)
式中,S锚板为锚板截面积,m2;F剪切应力为锚板剪切应力,kN;该锚定不考虑门机受到的上拔力[13]。
4.5 防风拉索防风能力F5
防风拉索一般设置为与垂直方向有一定的夹角,既能限制门机水平滑移,又能防止上拔力倾覆门机。MQ25-35设计的防风拉索受力图见图1。
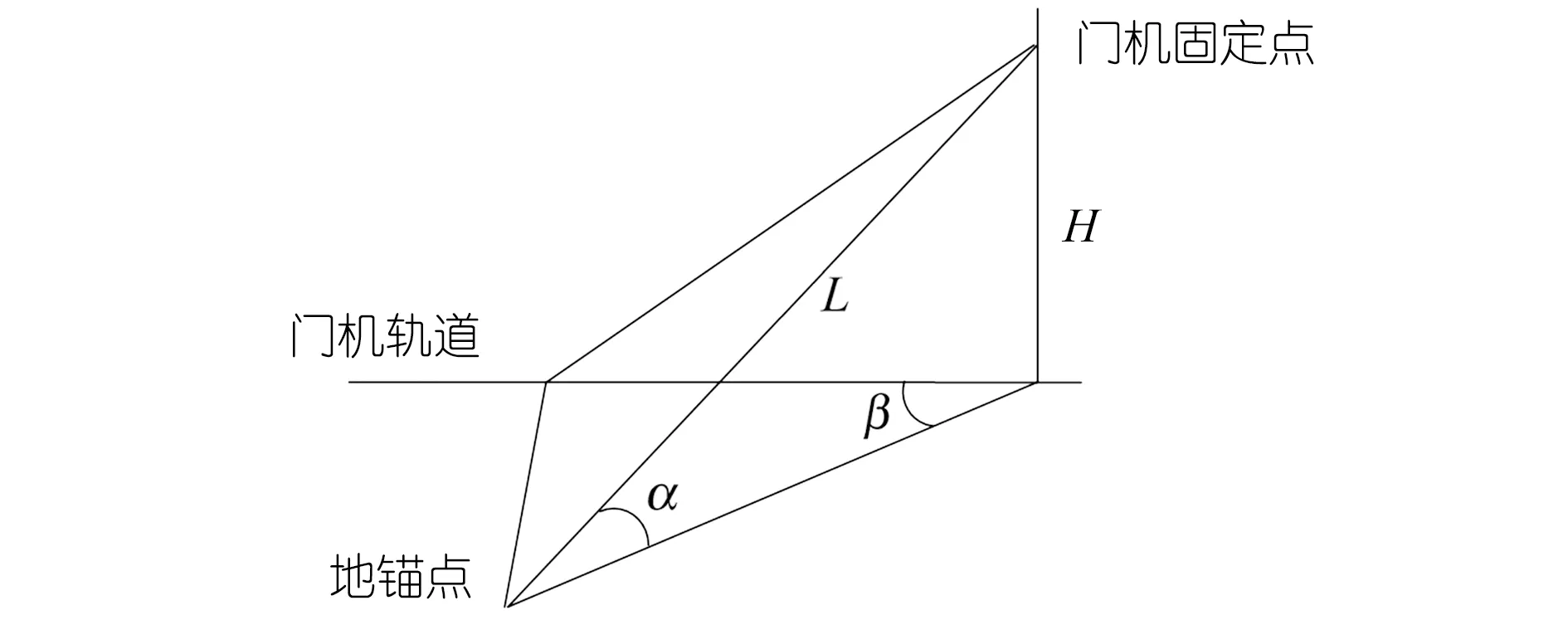
图1 MQ25-35门机防风拉索受力图
图1中L为防风拉索长度,α、β分别为拉风拉索与水平面和轨道方向的夹角,H为防风拉索门机固定点高度,防风拉索的抗风水平分力见表2。

表2 防风拉索的抗风水平分力
5 风速、风力与门机防风装置功效
下面就不同风速、风力条件下,各种防风装置的功效进行分析。
5.1 工作状态下防风措施安全系数及分析
根据交通部规定,港口起重机工作状态下的抗风能力应大于或等于35 m/s,对门机制动器、防爬器、铁鞋3项防风措施进行单项和组合安全系数计算(见表3)。根据门机设计安全系数1.4,该门机任一单项均不符合防风安全要求,应采取“制动器+防爬器”、“制动器+铁鞋”或“制动器+防爬器+铁鞋”的组合防风安全措施。
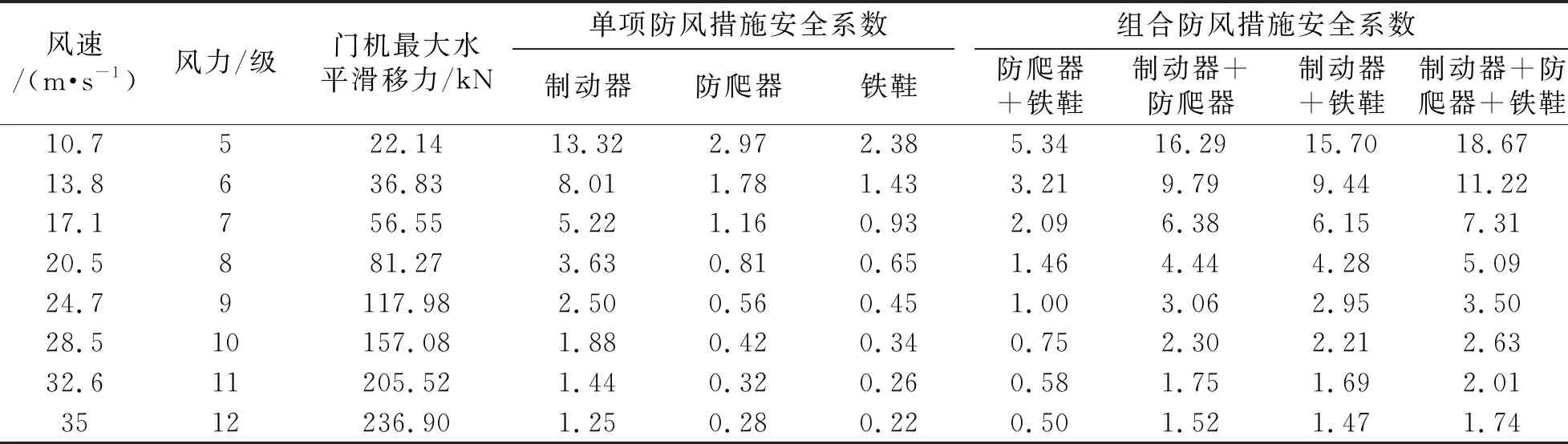
表3 工作状态下防风措施安全系数
考虑防风措施落实便捷程度及效能,工作状态下门机优先采取“制动器+防爬器”方案,在条件许可的情况下,再塞垫铁鞋。作业状态门机遭遇强阵风,当阵风不高于35 m/s时,依靠组合防风措施能够有效应对;当阵风高于35 m/s(12级)时,应采取就地封车、包桩系缆等方式应对,不得采取移动门机封车的方式。
工作状态门机防风措施中,制动器至少提供71.3%防风阻力,是防止门机沿轨道滑移安全的关键装置。但门机实际工作时,货物载荷的冲击会使门机产生晃动,长期作业将造成门机制动效果下降,因此,定期检查维护调整行走制动器,保持制动器状态良好非常重要。
5.2 非作业状态下防风措施安全系数及分析
非作业状态门机,驶回锚定位,一般采取制动器、防爬器、铁鞋、防风拉索、地锚等5种措施进行防护,其单项和组合安全系数计算见表4。
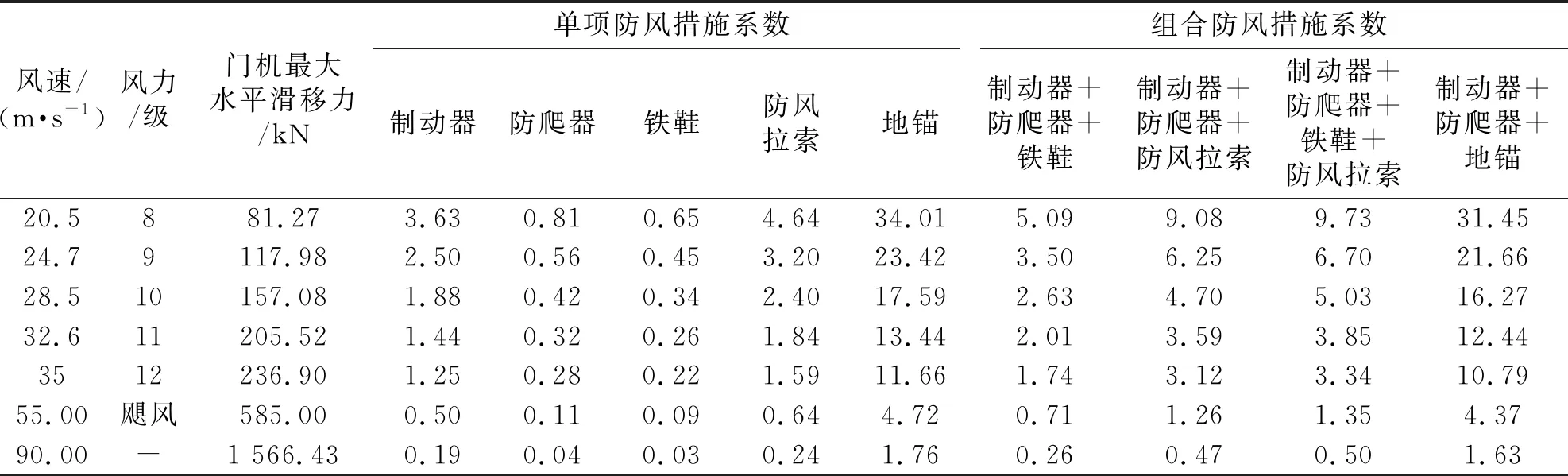
表4 非工作状态下防风措施安全系数
分析表4可得,根据门机设计安全系数1.4,非工作状态下的门机,地锚是最有效的防止门机滑移措施,单项可最高防90 m/s风速,其他制动器、防爬器、铁鞋、防风拉索4种单项和组合防风措施不能防范55 m/s风速。因此,MQ25-35门机必须配备地锚,并落实地锚防风措施。
6 结语
基于对MQ25-35门机防风装置的分析,提出了科学合理的防风装置配置模式,确保了门机在工作状态和非工作状态下的防风安全性。港口企业应加强对门机制动器、地锚、防爬器、铁鞋及防风拉索等防风装置的维护保养,保证其性能良好、动作可靠;同时加强员工培训教育,提高员工对门机防风能力的认知,明确门机防风的风险点和防控措施,清楚门机防风应急措施,掌握各类装置的检查、维护和操作要求,进一步保障门机安全。
