无人驾驶四轮独立驱动电动车稳定性控制研究
2021-04-27金鸿耀杜利民
金鸿耀,李 刚,杜利民
无人驾驶四轮独立驱动电动车稳定性控制研究
金鸿耀,李 刚,杜利民
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
针对无人驾驶四轮独立驱动电动车在轨迹跟踪稳定性问题,研究了一种综合制动防抱死ABS、驱动防滑TCS和横摆控制YSC的稳定性控制策略。给出了整车控制逻辑,应用MATLAB/Simulink与CarSim软件建立仿真模型,分别设计ABS、TCS和YSC的控制策略,选定典型工况进行了控制策略验证。验证结果表明:控制策略能够同时保证无人驾驶四轮独立驱动电动车的轨迹跟踪的准确性和行驶稳定性。
无人驾驶;四轮独立驱动;稳定性;控制策略;轨迹跟踪
无人驾驶技术是未来汽车智能化的发展方向,而轨迹跟踪控制是实现汽车无人驾驶控制的关键。汽车的横纵向控制策略影响着汽车的行驶稳定性和轨迹的跟踪能力。四轮独立驱动电动车,采用线控转向,轮毂电机驱动,结构简单,控制可靠,是近几年电动车发展的热点。
文献[1]提出了考虑滑移率的轨迹跟踪控制方法,最大程度地利用了滑移率和路面附着系数实现了智能车辆的轨迹跟踪控制;文献[2]提出了基于自主与差动协调控制的轨迹跟踪方法,提高了分布式驱动无人车的轨迹跟踪能力;针对复杂工况下,横向控制精度低,稳定差的问题,文献[3]提出了一种基于可拓优度评价的智能汽车横向控制轨迹跟踪方法,极大地提高了车辆的横向控制的适应性和可靠性;针对具有高度非线性、强耦合的无人驾驶汽车运动控制问题,文献[4]提出了一种基于模型预测控制的横纵向综合控制方法;文献[5]采用了纯跟踪控制实现了无人驾驶汽车的轨迹跟踪。文献[6]运用MPC控制策略针对AGV设计了轨迹跟踪控制器,优化问题考虑了燃油经济性问题,以红旗HQ430为基础运用veDYNA进行了仿真分析,仿真结果表明该控制算法对不同车速和路面附着系数均具有较高的鲁棒性。文献[7]研究了四轮转向(4WS)和直接偏航力矩控制(DYC)系统路径跟踪控制器。仿真结果表明,4WS + DYC控制系统比主动前转向(AFS),AFS + DYC和4WS控制系统具有更好的路径跟踪性能和操纵稳定性。文献[8]运用粒子群算法完成了PID的在线整定。
本文基于Simulink建立了整车稳定性控制模型,基于Carsim建立整车模型。通过MATLAB/Simulink联合Carsim仿真,验证控制模型的合理性。
1 整车控制逻辑
无人驾驶四轮独立驱动电动车的整车控制逻辑,如图1所示。
为了防止控制模式反复切换,允许误差存在一定的容错,即当error<1时,error<0;当1<error<2时,error=0;当error>2时,error>0。整车控制逻辑根据速度误差选择控制模式,当速度误差error>0时,选择TCS控制模式;当速度误差error=0时,选择保持模式;当error<0时,选择ABS控制模式。3种控制模式输出的制动轮缸压力,与YSC模式计算的输出量相加[9-10],得出系统最终的控制输出量。
速度误差的计算公式(1)所示。
当desire>actual时,进入TCS模式,当desire<actual时,进入ABS模式,当desire=actual时,进入保持模式。然后进行信号挑选,与YSC模式共同控制制动轮缸压力。
2 仿真模型建立
根据课题组自主研发的无人驾驶分布式驱动电动实验平台车的实际参数,如表1和表2所示,利用Carsim和Simulink搭建无人驾驶四轮驱动电动车的仿真模型。
表1 无人驾驶分布式驱动电动实验平台车参数
参数数值 总质量m/kg900 质心高度h/m0.45 质心距前轴的距离a/m0.95 质心距后轴的距离b/m0.95 轮距w/m1.4 车轮滚动半径R/m0.256 悬架刚度N/m62 悬架阻尼N/(mm·s-1)16.3
表2 轮毂电机的实际参数
参数转矩/Nm转速/(r·min-1) 不加载点0.6858.1 最高效率点69.5808.8 最大输出功率点143.2758.3 最大转矩点225.3121.9 结束点4.00
由于实验平台车采用的是4个轮毂电机驱动,没有发动机、变速箱、差速器、离合器以及液力变矩器等机构。因此,动力系统利用查表方法得出驱动力矩;平台车采用的是线控转向,机械结构比较特殊,主销后倾角、主销外倾角等设置为零;平台车采用的轮胎型号为195/40 R14,由于没有该型号轮胎的详细数据。所以,在CarSim中选用轮辋尺寸接近且尺寸相差不大的轮胎,进行参数修改。制动系统采用液压制动,前后轮均采用浮钳盘制动。制动控制采用制动踏板力输入,真空助力器等结构的参数选择默认。
3 控制策略
ABS控制的作用是防止车轮抱死,使车辆失去转向等功能。TCS控制针对的是在低附着路面,车辆加速起步的控制,防止车轮出现打滑等不理想的状况发生。TCS、ABS两种控制策略,结合使用可以大幅度提高车辆的行驶稳定性,提高加速和爬坡能力;在低速打滑时,用ABS进行动作,可以减小车轮打滑[11]。
如图2所示,在ABS控制逻辑中,滑移率由车速和轮速得到,如公式(2)所示。当车速大于6 km/h且车速误差小于零时,启动ABS控制;当滑移率小于0.05时,进入增压状态,=1;当滑移率在0.05与0.2之间时进入保压状态,=0;当滑移率大于0.2时,进入减压状态,=-1;当车速小于6 km/h时,ABS不起作用,=1;制动轮缸压力可以根据制动主缸压力与计算出的比例阀附近的压力比值得到,如公式(3)所示。
式中:是汽车的行驶速度, m/s;u是汽车的轮速, m/s。

式中:P是汽车的制动轮缸压力, MPa;P是制动主缸压力, MPa;是制动管路比例阀附近的压力比值。

图2 ABS控制策略逻辑框图
如图3所示,在TCS控制策略逻辑中,当车速小于1.5 km/h时,判定车辆没有启动,TCS控制关闭;当车速大于1.5 km/h且车速误差大于零时,TCS控制开启;滑转率根据轮速和车速计算得到,通过控制前轮或后轮的制动轮缸压力,实现降低轮速的目的,防止车轮打滑。同时,TCS控制系统也控制驱动力矩随轮胎滑转率变化而变化。
ABS、TCS只在制动和加速时工作,直接控制车轮的纵向滑移率,提高了车辆的驱动和制动能力,而YSC在车辆行驶的任何时间都起作用,YSC直接控制车辆的侧向稳定性[12]。本文YSC采用的是横摆力矩及制动力控制方式。
稳定性因数是衡量车辆稳态响应的重要参数。根据整车的控制参数,得出车辆的稳定性因数,计算公式如下:
式中:为汽车质量;为汽车轴距;、为前轴距和后轴距;1、2为前轮侧偏刚度,后轮侧偏刚度。
当<0时,为不足转向,车辆转向运动方式如图4中的状态一所示,车辆的实际转弯半径比期望的要大;当=0时,为中性转向,车辆转向运动方式如图中的状态二所示;当>0时,为过多转向,车辆转向运动方式如图4中的状态三所示。

图3 TCS控制策略逻辑框图
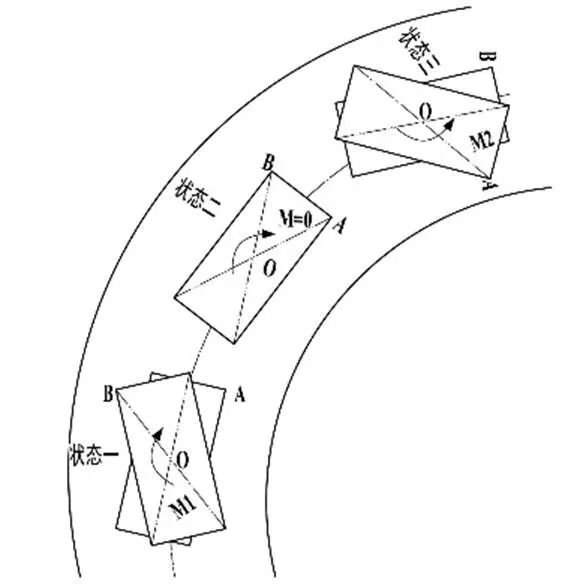
图4 不同稳定性因数下的车辆行驶状态
为了提高车辆航向的稳定性,当>0时,需要对弯道内侧的车轮施加一定的制动力,由于内外侧轮速存在偏差,从而产生一定的回正力矩1,回正力矩迫使车辆航向回正,此时内侧车轮制动可以解除;当=0时,车辆的航向稳定,不需要由单侧车轮制动产生的回正力矩;当<0时,车辆转向过多,实际航向偏向弯道内侧,此时对弯道外侧的车轮进行制动,产生的回正力矩2使车辆向弯道外侧行驶。
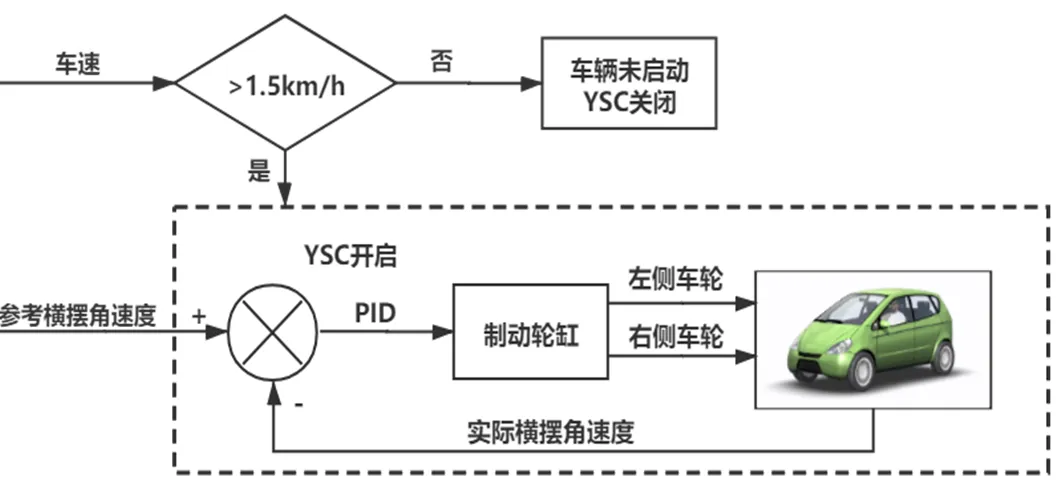
图5 YSC控制逻辑框图
如图5所示,YSC控制逻辑中,首先应判定车辆是否启动。只有启动时,YSC控制系统才会开启。根据横摆角速度的差值计算左右侧制动轮缸压力,实现车辆行驶航向实时调整。
4 仿真验证
为了验证控制策略的有效性,分别验证ABS、TCS和YSC,最后再对整车控制策略进行验证。
实验1 ABS控制策略验证
实验工况为:直线单一低附着路面,附着系数0.4,仿真时间45 s,无人驾驶四轮独立驱动电动车的转向轮转角为零,即不考虑转向的影响。
实验结果如图6所示,在车速对比图中期望车速从零开始增大,大约在20 s时,急剧下降,直至为零;实际车速在初始阶段有一个明显的加速,并且超过了允许的误差范围,车辆产生了轻微制动,约在20 s时,由于期望车速的变化,车辆产生较大的制动。观察前后轮轮速的变化,可以得知ABS控制在低附着路面进行制动时,可以起到有效的控制作用。同时,在低附着路面条件下进行较大的制动,车辆没有发生制动跑偏。由此得出,ABS控制策略,可以满足无人驾驶四轮独立驱动电动车高速制动的要求。
实验2 TCS控制策略验证
实验工况为:直线单一低附着路面,附着系数0.25,仿真时间30 s ,无人驾驶四轮独立驱动电动车的转向轮转角为0,即不考虑转向的影响。
如图7所示,对比轮速与车速的变化可以得出,在低附着路面条件下,采用TCS控制的无人驾驶四轮独立驱动电动车在起步加速的过程中,可以较好地保持轮胎的滑转率在合理范围内,车辆可以在较短时间内完成加速,且保证车辆不失去稳定。TCS控制策略,在控制车轮滑转率的方式上,不仅采取了制动降低轮速,而且通过控制降低输入驱动转矩的方式,达到降低轮速的效果。
实验3 YSC控制策略验证
实验工况为单一低附着路面,附着系数0.4,仿真时间30 s,无人驾驶四轮独立驱动电动车转角根据期望轨迹解算得出,跟踪轨迹为曲线。
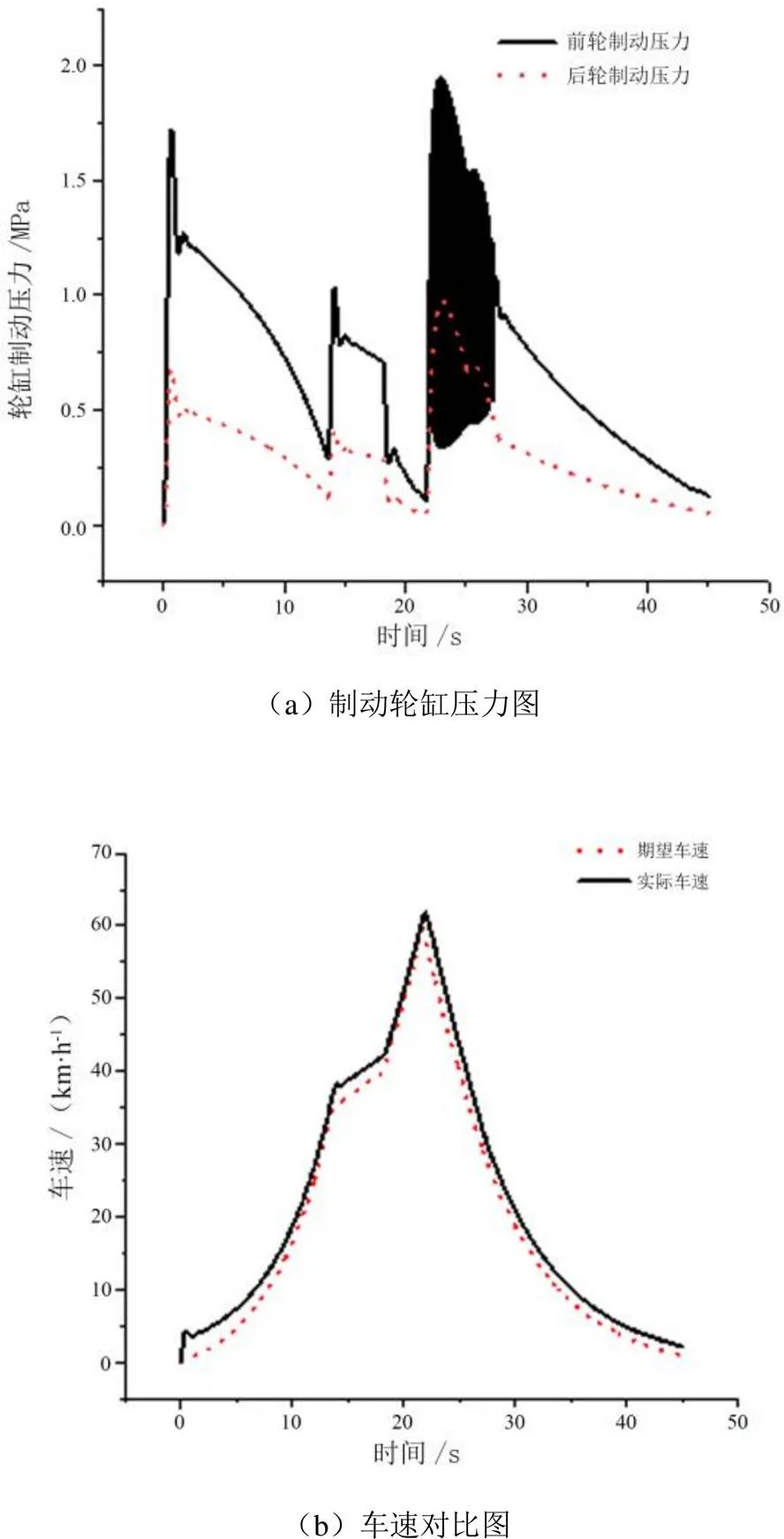
如图8所示,分析实验结果可以得出,跟踪的期望轨迹为正弦曲线,实际车速从零开始逐渐增加。由于路面附着系数较低,在前10 s内,车速在30 km/h范围内,车辆的实际横摆角速度与期望横摆角速度相差不大;随着车速的快速增加,车辆高速转弯,造成的横摆也更加剧烈。同时,在横摆角速度差值变化越大时,两侧车轮的制动压力也在增加,始终将滑移率维持在合理范围,保持车辆的稳定性。综上,本文搭建的YSC系统控制左右侧车轮的滑移率,始终保持车辆横摆运动维持在合理范围内,保证车辆的稳定行驶。

图8 TSC控制策略实验验证结果
实验4 整车控制策略验证
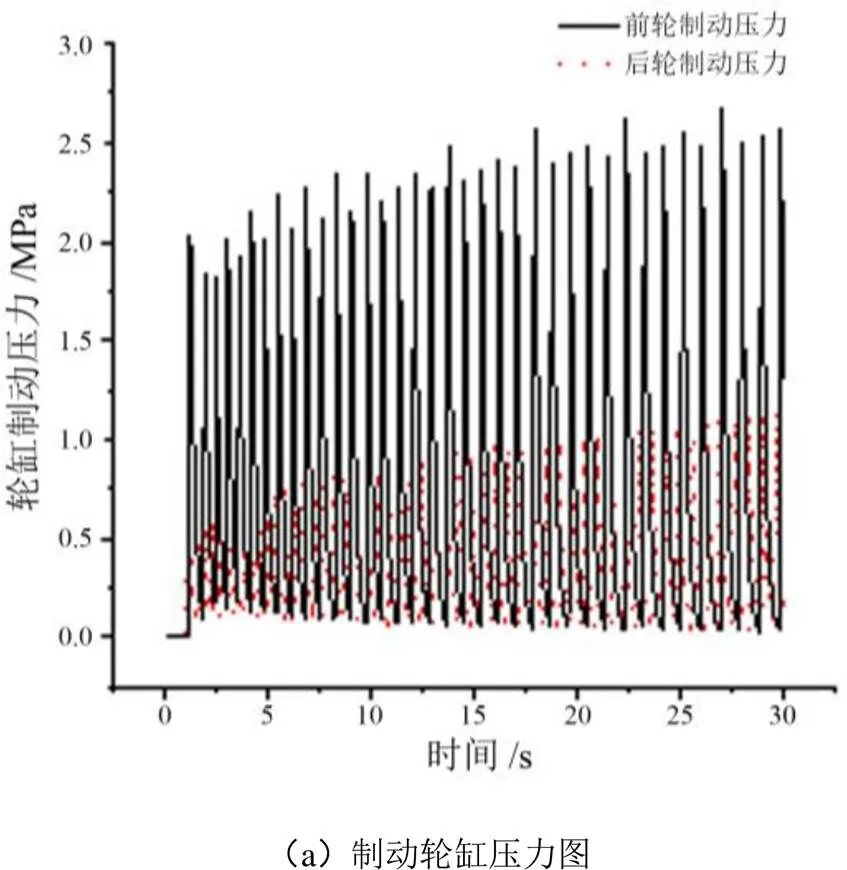
实验工况为:跟踪双移线轨迹,路面条件为对接路面,前3 m路面附着系数为0.25,3 m后附着系数0.4,仿真时间为45 s,无人驾驶四轮独立驱动电动车转向轮转角根据期望轨迹解算得出,实验结果如图9所示。

分析实验数据可以得出,车辆在低附着路面条件下进行变速轨迹跟踪控制,在跟踪双移线轨迹的过程中,车辆的实际横摆角速度和期望横摆角速度变化趋势相同,数值相差不大;TCS控制车辆的驱动力矩合理地减小;对比跟踪轨迹得出,在低附着路面条件下,无人驾驶4轮独立驱动电动车轨迹跟踪效果良好。
综上,整车控制策略控制逻辑合理,可以保证无人驾驶四轮独立驱动电动车在轨迹跟踪过程中的车辆行驶稳定性,提高了无人车轨迹跟踪能力。
5 结论
综合制动防抱死、驱动防滑和横摆力矩控制角度,设计了无人驾驶四轮独立驱动电动车的稳定性控制策略,建立仿真模型和进行了仿真验证。验证结果表明论文设计的控制策略实现了无人驾驶四轮独立驱动车辆准确轨迹跟踪和行驶稳定性。
[1] 孙会来, 李研强, 赵良柱, 等. 基于最优滑移率的车辆轨迹跟踪控制研究[J]. 汽车实用技术, 2020(9): 61-64.
[2] 徐兴, 汤赵, 王峰, 等. 基于变权重系数的分布式驱动无人车轨迹跟踪[J]. 中国公路学报, 2019, 32(12): 36-45.
[3] 蔡英凤, 秦顺琪, 臧勇, 等. 基于可拓优度评价的智能汽车横向轨迹跟踪控制方法[C]. 2019中国汽车工程学会年会论文集(1), 2019: 41.
[4] 谢辉, 刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. 汽车安全与节能学报, 2019, 10(3): 326- 333.
[5] 奉山森. 无人驾驶汽车路径跟踪控制研究[D]. 长沙: 湖南大学, 2018.
[6] Yu R, Guo H, Sun Z, et al. MPC-Based Regional Path Tracking Controller Design for Autonomous Ground Vehicles[C]. IEEE International Conference on Systems, Man, and Cybernetics. IEEE, 2016: 2510-2515.
[7] Peng Hang, Chen Xinbo, Luo Fengmei. LPV/ H∞Controller Design for Path Tracking of Autonomous Ground Vehicles Through Four-Wheel Steering and Direct Yaw-Moment Control[J]. International Journal of Automotive Technology, 2019, 20(4): 679-691.
[8] Kim T H, Maruta I, Sugie T. Robust PID controller tuning based on the Constrained particle swarm optimization[J]. Automatica, 2008, 44(4): 1104-1110.
[9] 李刚, 王野, 赵德阳. 基于逻辑门限值的汽车ABS控制策略与试验研究[J]. 现代制造工程, 2017(7): 12-16.
[10] 史国宝, 宋天麟, 金达锋. 电机驱动的ABS/TCS的建模仿真[J]. 机械与电子, 2019, 37(12): 33-37.
[11] 方春杰. 基于ESP的纯电动汽车稳定性控制及仿真[J].汽车工程师, 2018(6): 39-43, 54.
[12] 陈松, 夏长高, 李胜永, 等. 汽车ESP系统的混杂切换控制研究[J]. 机械科学与技术, 2018, 37(4): 614-622.
Research on Stability Control of Autonomous Four-wheel Independent Drive Electric Vehicle
JIN Hong-yao, LI Gang, DU Li-min
(School of Automobile and Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China)
Aiming at the trajectory tracking stability problem of autonomous four-wheel independent drive electric vehicle, a stability control strategy of integrated brake anti-lock ABS, drive anti-skid TCS and yaw control YSC is studied. The control logic of the whole vehicle is given. The simulation models are established by using MATLAB/Simulink and CarSim software. The control strategies of ABS, TCS and YSC are designed respectively, and the typical working conditions are selected to verify the control strategies. The verification results show that the control strategy can simultaneously ensure the accuracy of the trajectory tracking and driving stability of the autonomous four-wheel independent drive electric vehicle.
autonomous driving; four-wheel independent drive; stability; control strategy; trajectory tracking
U461
A
1674-3261(2021)02-0105-06
10.15916/j.issn1674-3261.2021.02.008
2020-06-10
国家自然科学基金面上项目(51675257)
金鸿耀(1997-),男,辽宁大连人,硕士生。
责任编校:刘亚兵
