基于神经网络的车辆急加速工况驾驶性评价研究
2021-04-24莫易敏胡恒王骏熊钊
莫易敏 胡恒 王骏 熊钊
(武汉理工大学,武汉 430070)
主题词:驾驶性 主观评价 客观评价 BP神经网络
1 前言
驾驶性是指车辆对驾驶员的相关操作所做出的动态响应,主要包含车辆在纵向直线行驶过程中的动态性和舒适性。目前,驾驶性评价分为主观评价和客观评价。主观评价是由专业试驾工程师根据主观感受对车辆的驾驶性表现进行打分,评分反映了驾驶员对目标车辆驾驶性的满意度,但易受工程师喜好、环境、车内噪声等诸多因素影响,导致其一致性较差,需由多名试驾工程师多次试验才能得到较为准确的结果。客观评价利用AVL-Drive等专业软件采集车辆试验数据,通过数据的后处理定量分析车辆的驾驶性表现,可为车辆的驾驶性优化提供重要的依据,但无法反映人的主观感受。
在主观评价研究中:杨家成等[1]提出了模糊层次与离散系数相结合的方法,定量地分析了不同试驾员的评价能力;Wi Hyoseong等[2]系统地分析了车内噪声的变化对主观评价的影响;Huang 等[3]基于主层次分析及改进的极限学习机理论构建了主观评价预测模型,有效提高了主观评价的准确性、稳定性及预测精度;刘普辉等[4]利用模糊层次分析法确定了各主观评价指标间的权重分配。对于客观评价:C.Jauch 等[5]以加速延迟、加速度冲击(Kick)、加速度颠簸(Jerk)及加速度跳跃(Bump)作为评价指标,重点从加速度方面对混合动力汽车的部分工况进行了客观评价分析;C.Shin 等[6]以加速延迟、加速度均方根、加速度振动剂量值等与行驶舒适性和换挡品质有关的5 个指标对混合动力车辆进行了驾驶性分析评价;黄伟等[7-8]对蠕行、起步工况的客观评价体系及主客观的相关性进行了研究;胡月等[9]从加速度和纵向冲击度2 个方面对车辆的瞬态响应和纵向稳定性等方面进行了相关研究。
综上,现有针对驾驶性评价的研究大多选用部分指标为依据,针对某种具体工况提出评价方法,鲜有学者进行主、客观相关性研究,对驾驶性进行综合评价。本文针对急加速工况,通过工况特性分析,构建客观评价体系,然后使用BP神经网络模型建立主、客观评价间的映射关系,结合两者优点解决主观评价一致性差和客观评价无法反映人体主观感受的缺点。
2 急加速工况客观评价方法
2.1 急加速工况分析及客观评价指标确定
急加速(Tip in)工况是在驾驶员迅速踩下油门踏板至目标开度时,车辆在纵向所做出的响应,反映了车辆在负载突然变化时的反应能力。在该工况下,车辆的扭矩应快速上升以满足所期望的动力响应[10],但因车辆突然加速时的重心移动,导致前、后悬架分别处于拉伸和压缩状态,使得减振器对振动的吸收受到限制,而扭矩和转速的快速上升所产生的振动对舒适性有较大影响。故在该工况下,除评估车辆的动态响应外,也应当考虑到过快的动力响应所带来的舒适性问题。故从动态性和舒适性2个方面对车辆的驾驶性进行评估。
在动态行驶过程中,车辆的加速度和发动机扭矩的输出水平决定了其加速性能的优劣。加速度、扭矩输出及发动机转速的平稳性影响着车辆在加速过程中的动力衔接平稳性,加速度过大会给人带来不舒适的主观感受[9],扭矩输出和发动机转速不平稳造成的振动及乘员舱内的噪声水平同样对舒适性有着较大的影响。故从加速度、扭矩、发动机转速及噪声4 个方面来确定急加速工况的驾驶性客观评价指标。从数据后处理的方便性、指标的可获得性及代表性等方面考虑,确定的具体指标如表1所示。
2.2 急加速工况客观评价指标说明
驾驶性客观评价指标分别如图1~图3所示。
各项指标说明及计算公式如下:
a.响应延迟。用踩下油门踏板后,加速度增加0.5 m/s2所需的时间表示,反映了车辆加速度的响应情况,其表达式为:

式中,tresp为响应延迟时间;tr为加速度增加0.5 m/s2的时间;ts为踩下油门踏板的时间;te为工况结束时间。
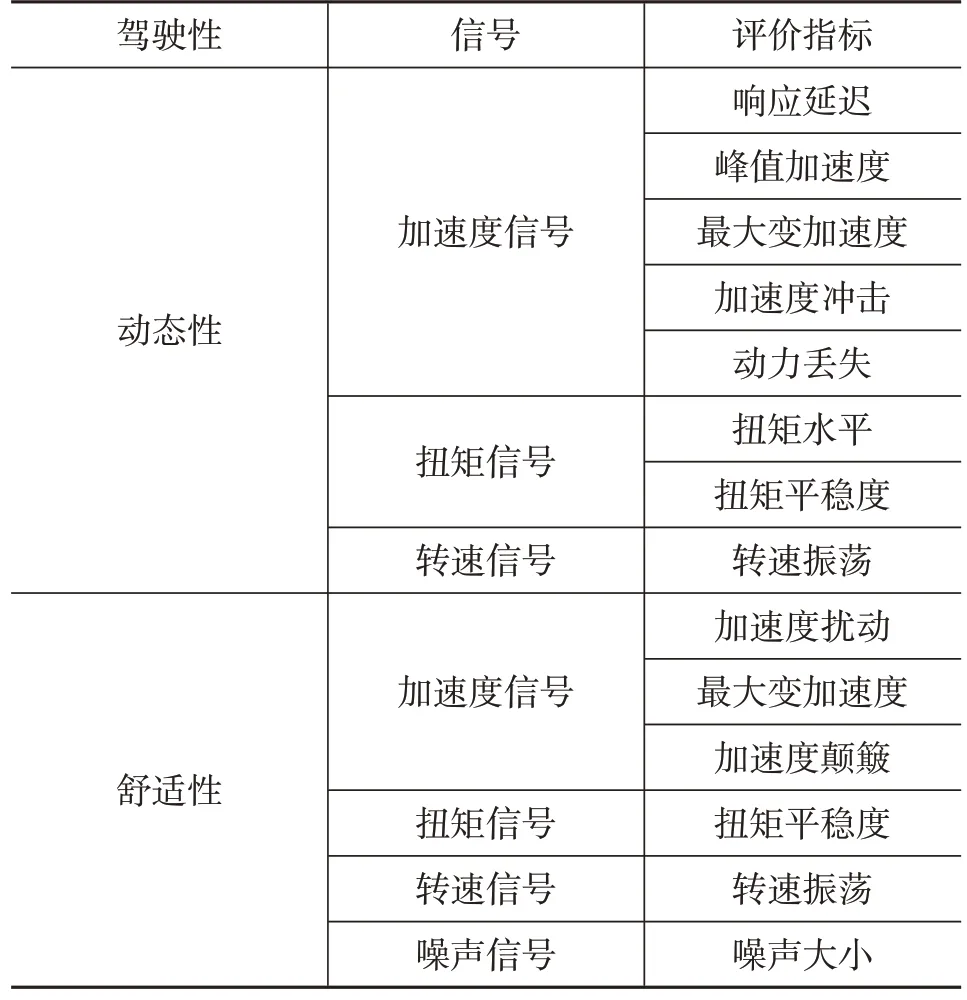
表1 驾驶性客观评价指标
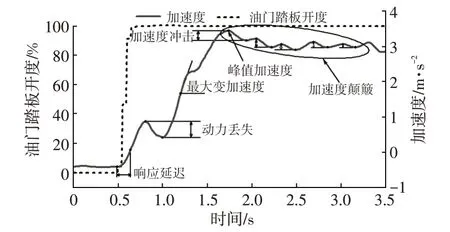
图1 加速度相关指标示意

图2 扭矩相关指标示意
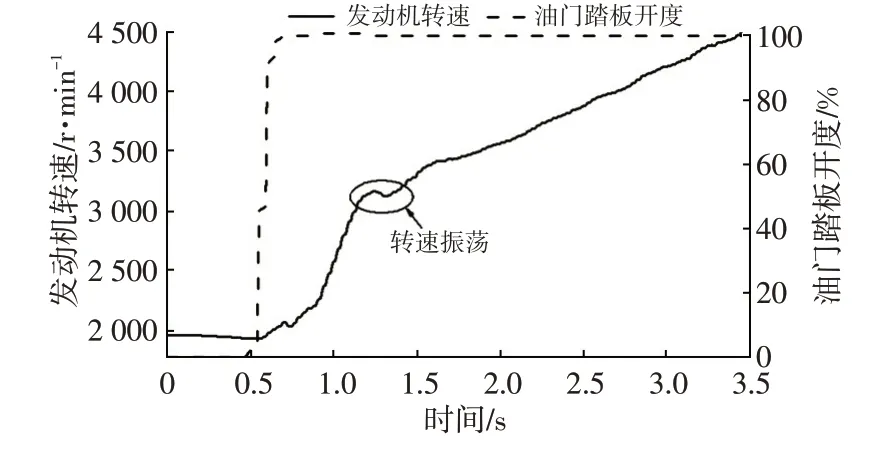
图3 转速相关指标示意
b.峰值加速度。指急加速工况下的加速度最大值:

式中,amax为峰值加速度;v为速度;t为时间。
c.最大变加速度。指加速度斜率的最大值,反映车辆加速度增加的快慢程度,与动态性正相关,与舒适性负相关,其表达式为:

式中,Jmax为最大加速度变化率;a为加速度。
d.加速度冲击。用加速度达到峰值后与第1个波谷的差值表示:

式中,Δa为峰值加速度与第1个波谷的差值;at1为峰值加速度后加速度曲线第1个波谷值。
e.加速度颠簸。用峰值加速度后的5个加速度冲击表示:

式中,Δai为第i个加速度冲击;aci、ati分别为峰值加速度后加速度曲线第i个波峰、波谷值。
f.加速度扰动。指急踩油门踏板后的加速度扰动情况,使用加速度平均值amean、加速度均方根arms及加速度振动剂量值avdv表述:

g.动力丢失。指加速度在增大过程中,出现突然回落的现象,使用加速度差值表示:

式中,Δa′为动力丢失值;ac′、at′分别为事件开始到峰值加速度之间的加速度波峰、波谷值。
h.转速振荡。指在加速过程中,不因换挡而引起的转速振荡,使用转速差Δe表示:

式中,ec、et分别为转速在爬升过程中出现的局部波峰、波谷值。
i.扭矩水平。指从峰值扭矩开始至工况结束,车辆实际扭矩曲线与坐标轴所围面积与期望扭矩和坐标轴所围面积的比值,反映了车辆扭矩的输出水平,比值越大表明动态性越好,实际扭矩T与期望扭矩Texp分别为:
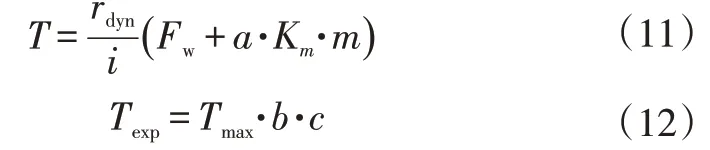
式中,rdyn为车轮半径;i为车辆总传动比;Fw为行驶阻力,包含滚动阻力、空气阻力和爬坡阻力;a为加速度;Km为质量修正系数;m为车辆质量;Tmax为扭矩最大值;b、c分别为与油门踏板开度和发动机转速相关的修正系数,b,c∈[0,1]。
j.扭矩平滑度。即峰值扭矩后的5 个波峰、波谷的差值平均数与对应扭矩曲线段的平均值的比值:
语法即语言的法则。扎实的基础语法知识对于学生准确理解文章中的长难句以及做好主观卷中的语法填空、改错题尤其是写作是极其重要的。对于语法复习,我们将采用“思维导图+重难点、考点突破+专项练习+阅读分析+写作运用”的复习方法对语法进行系统、全面的复习。要求学生通过思维导图系统了解各个语法项目,掌握、落实和运用语法重点。教师帮助学生突破重难点、解决学生问题。教师分工收集和改编各个语法重点在近几年高考题中的考查。试题讲评过程中选择性的让学生分析长难句。同时教师在复习过程中要加强锻炼学生将语法知识在英语写作中的正确、灵活使用,为英语写作增色、提分。
式中,Tsmt为扭矩平滑度;ΔTi(i=1,2,3,4,5)为峰值扭矩后,第i个扭力波峰、波谷差值。
k.噪声大小。即急加速工况下乘员舱内噪声水平。
最终构建起的急加速工况客观评价方法如图4所示。

图4 急加速工况客观评价方法
响应延迟、加速度冲击、动力丢失、转速振荡4 个指标越小,峰值加速度、扭矩水平、最大变加速、扭矩平稳度4 个指标越大,表明车辆的动态性越好。最大变加速度、转速振荡、加速度扰动、加速度颠簸、噪声大小5 个指标越小,扭矩平稳度越大,表明车辆的舒适性越好。
3 驾驶性主观评分预测模型搭建
BP 神经网络是一种信号前向传递、误差反向传递的多层前馈神经网络,具有很强的非线性映射能力。通过反向传播预测值与期望值间的误差,对各层的权值与阈值进行不断调整,使得预测值不断逼近期望值。结合驾驶性客观评价指标与主观评价之间为非线性关系以及没有较明显的对应关系的特点,本文采用BP 神经网络模型搭建急加速工况下的驾驶性评分预测模型。
在不影响研究对象的前提下,为提高训练速度,构建单隐含层神经网络模型。首先针对车辆驾驶性中的动态性和舒适性分别搭建主观评分预测模型。根据表1 中评价指标数量得到动态性预测模型输入层节点数为8个,舒适性预测模型输入层节点数为6个。各预测模型隐含层节点数p由经验公式得出:

式中,n和m分别为输入、输出节点数;d为0~10范围内的随机数。
采用试凑法确定动态性预测模型隐含层节点数为5 个,舒适性预测模型隐含层节点数为4 个。最终动态性主观评分预测模型(简称动态性预测模型)结构为8-5-1,舒适性主观评分预测模型(简称舒适性预测模型)结构为6-4-1,拓扑结构分别如图5、图6所示。

图5 动态性预测模型拓扑图

图6 舒适性预测模型拓扑图
为简化神经网络模型搭建过程,使用MATLAB 中用于单隐含层神经网络的Neural Net Fitting神经网络工具箱进行动态性和舒适性预测模型的搭建,该工具箱激活函数为Sigmoid函数,其表达式为:

损失函数为均方误差函数fMSE:

式中,yi、分别为样本中第i个真实值与预测值,i=1,2,…,n。
训练算法选用莱文伯格-马夸特(Levenberg-Marquardt)算法。模型搭建完成后使用随机初始化的方式初始化预测模型各权值与阈值。急加速工况驾驶性评价预测模型搭建流程如图7所示。

图7 急加速工况驾驶性预测模型构建流程
4 测试验证
4.1 驾驶性试验及数据采集
为使试验数据及结果具有普遍性,本次试验车辆在采用国内某主机厂搭配无级变速器(CVT)的车型V1的基础上,加入了2 款分别搭载自动变速器(AT)和双离合自动变速器(DCT)的对标车型V2 和V3,均为SUV车型,行驶里程均为2 000 km 左右,车辆状态及各项指标良好,车辆按照最大装载质量进行装载,且质量分布均匀。试验场地使用国内某主机厂封闭试验场地。试验环境为晴朗天气、干燥路面,其余按GB/T 12534—1990《汽车道路试验方法通则》执行。试验设备为AVL-Drive数据采集仪,其中加速度信号由分别装于悬架下摆臂的单轴传感器、装于驾驶位头枕处的单轴传感器及装于副驾驶位滑轨末端的三轴传感器采集,噪声信号通过装于驾驶位头枕处的噪声采集仪获得,其余信号,如发动机转速、车速及制动信号等通过CAN总线读取。
为更好地反映车辆的真实运行情况,将急加速工况分为部分载荷工况和全载荷工况。部分载荷工况油门开度分别为25%、50%和75%,全载荷工况油门开度为100%。25%油门开度使用D 挡进行试验,50%和75%油门开度分别使用D挡和S挡2种模式进行试验,100%油门开度使用S挡进行试验。试验采用动态加速方式,车速达到10 km/h 时踩下油门踏板,车速提高20 km/h后松开油门踏板,待车速降低10 km/h 时,再次踩下油门踏板,车速提高20 km/h 后再次松开油门踏板,重复以上操作直至达到各油门开度下的最高车速或车速达到120 km/h。每个油门开度试验进行2次,每次踩下油门踏板后试驾工程师对车辆的动态性和舒适性表现进行打分。最终,每辆车采集得到130 组原始数据,共得390组原始数据。
4.2 预测模型训练
利用4.1 节中采集到的390 组原始数据计算2.2 节中的各指标,最终每辆试验车型得到动态性及舒适性客观指标集各130组,从各车型动态性和舒适性指标集中随机选取100 组数据及对应主观评分,组成分别包含300组数据的动态性数据集和舒适性数据集,对动态性预测模型和舒适性预测模型进行训练。
为避免因输入、输出数据数量级差别较大而造成预测误差较大的问题,首先进行数据预处理,进行数据归一化,在数据输出时对数据进行反归一化后输出。数据归一化采用最大最小法,表达式为:

式中,xk(k=1,2,…,300)为第k个原始数据;xmin、xmax分别为数据序列的最小值、最大值。
因MATLAB Neural Fitting 神经网络工具箱会对数据自动进行归一化与反归一化处理,可将各数据集直接导入预测模型对模型进行训练。现按70%∶15%∶15%的比例将数据集划分为训练集、验证集和测试集对动态性预测模型和舒适性预测模型进行训练。
如图8、图9 所示,动态性预测模型共经历25 次训练,在第19 次时验证集均方误差达最低值0.030 552。舒适性主观评分预测模型共经历18 次迭代,在第12次时验证集均方误差达最低值0.060 637。为防止过拟合,在验证集的均方误差连续6 次增加后停止模型训练。
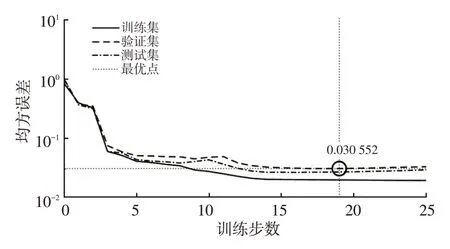
图8 动态性预测模型各数据集均方误差收敛过程
对误差进行绝对值化处理,如图10、图11 所示,动态性预测模型误差值主要集中在0~0.3范围内,舒适性预测模型误差主要集中在0~0.4范围内。以0.5作为阈值计算预测模型各数据集准确率。在动态性预测中,训练集、验证集误差大于0.5的组数量均为1组,准确率分别为99.5%、97.8%,测试集所有误差均小于0.5,准确率为100%。在舒适性预测模型中,训练集、验证集、测试集误差大于0.5的分别有11组、1组、4组,准确率分别为94.76%、97.78%、91.11%。

图9 舒适性预测模型各数据集均方误差收敛过程

图10 动态性预测模型各数据集误差分布

图11 舒适性预测模型各数据集误差分布
如图12 所示,动态性预测模型各数据集总相关性为0.926 33,其中训练集相关性为0.933 34,验证集相关性为0.904 36,测试集相关性为0.917 65。如图13 所示,舒适性预测模型各数据集总相关性为0.932 97,其中训练集相关性为0.937 74,验证集相关性为0.928 28,测试集相关性为0.911 95。各数据集都有较强的相关性。
4.3 预测模型准确率验证
为验证预测模型在未知输出情况下的准确率,从各车型剩余的30组动态性和舒适性指标数据中随机选取20 组数据,组成动态性及舒适性预测模型准确率测试数据集,对动态性及舒适性预测模型分别进行测试,测试误差结果如表2所示。

图12 动态性预测模型各数据集相关性

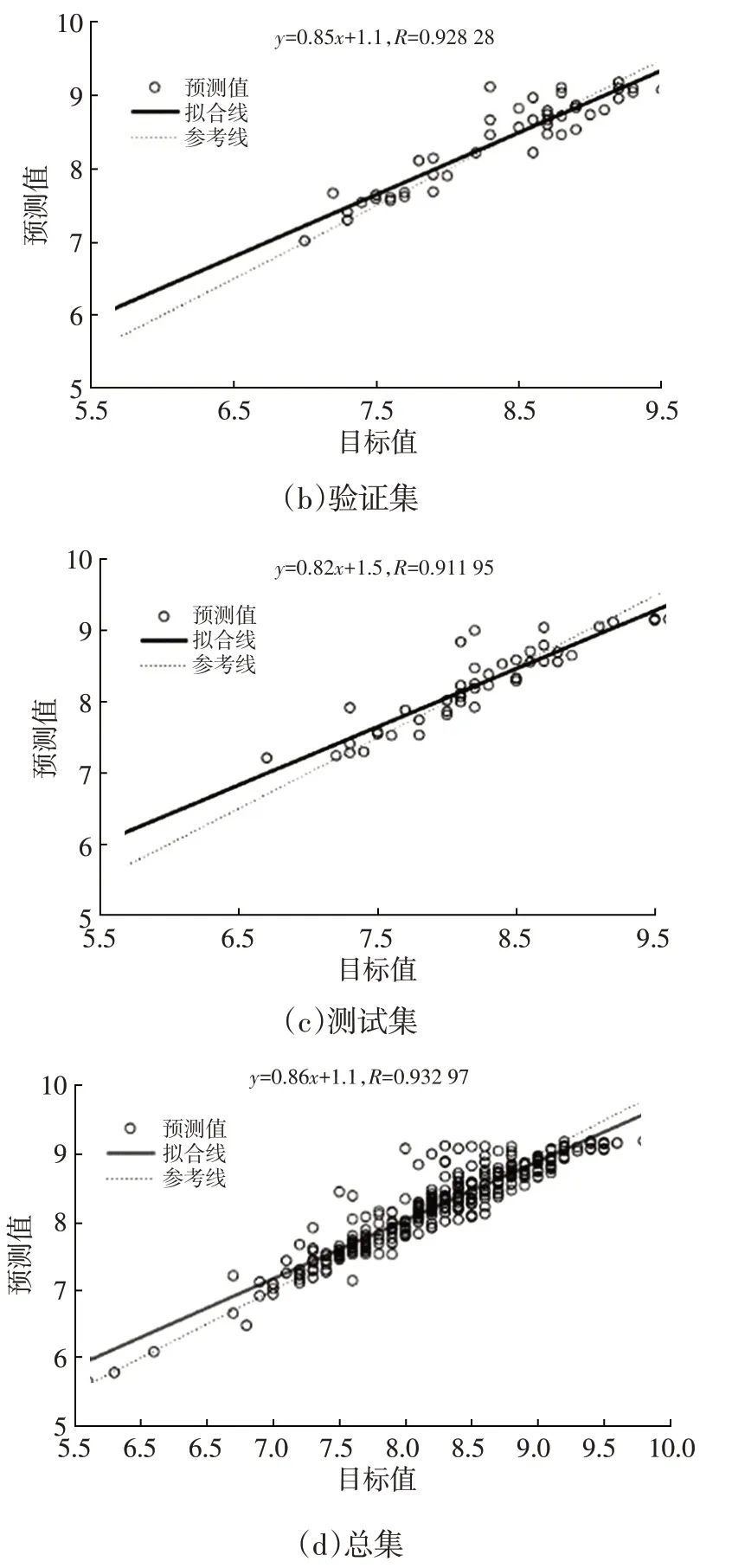
图13 舒适性预测模型各数据集相关性
由表2 可知,各车辆动态性预测误差最大值为0.555,最小值为0.010,舒适性预测误差最大值为0.632,最小值为0。
在车辆主观评分分级中,SAE J1441 规定,以10 分为总分,按每2分一级,将车辆主观评分等级划分为5个等级,如表3所示。
根据SAE J1441 评分标准,以误差小于0.5 作为驾驶性预测模型的合格标准,得到各车辆动态性和舒适性的预测模型的合格率如表4所示。
由表4 可知,所有预测合格率均达到95%以上,表明该基于神经网络的驾驶性预测模型有较好的预测效果。综上,本文所搭建的驾驶性预测模型有着良好的预测精度,为搭建驾驶性的主、客观评价间的关系提供了一种较为可靠的方法。同时,该方法可推广至其他工况的驾驶性评价中。

表2 动态性及舒适性神经网络测试误差

表3 SAE J1441主观评分标准 分

表4 驾驶性预测模型合格率
5 结束语
本文通过对车辆的急加速工况特征进行分析,从加速度、扭矩、转速及噪声4 个方面选定驾驶性客观评价指标,然后利用BP 神经网络构建了驾驶性主观评分预测模型,通过试验验证了预测模型的准确率在95%以上。本文建立了主、客观评价间的映射关系,有效解决了主观评价一致性不高及客观评价无法反映人的主观感受的问题,但所选试验车辆皆为SUV车型,在其他类型车辆及其他工况下,预测模型的准确率还待进一步验证。
