软体机器人流体驱动方式综述
2021-04-23赵宇豪谭代彬
赵宇豪, 赵 慧, 谭代彬
(1.武汉科技大学 机械自动化学院, 湖北 武汉 430081; 2.武汉科技大学 机器人与智能系统研究院, 湖北 武汉 430081)
引言
软体机器人近年来一直是机器人领域的研究热点[1-3],同时软体机器人也是一个多学科交叉的研究,涉及仿生学、机器人学、软材料学以及控制等学科,随着仿生技术、新型柔性材料、柔性传感器、3D打印等技术的快速发展,促进软体机器人不断走向成熟。
与传统刚性机器人相比,虽然很多工业机器人已经可以代替人完成大部分的生产工作,但是在人-机-环境交互方面还存在一些问题。软体机器人由于在材料上采用了硅橡胶等柔性材料,所以其界面友好,在人-机-环境交互上更加安全。
软体机器人的驱动方式可分为流体驱动[4]、线驱动[5]、形状记忆合金驱动[6-7]、电活性驱动[8-9]等;流体驱动是通过对一定形状的弹性腔施加正负压的流体从而产生变形与运动,其中流体可以是气体、液体或微流体,并且通过改变其结构产生具有伸长、压缩、弯曲、扭转、弯曲+扭转等多种运动形式的驱动器,并且根据这些驱动器研制了许多类型的软体机器人,例如爬行软体机器人[10-11]、抓取软体机器人[12-14]、水下软体机器人[15-16]、跳跃软体机器人[17]等。目前,流体驱动因其形式多样性、响应快速性等被广泛研究,并且在探索、抓取、医疗、养老助残等多个领域取得了一些进展,如哈佛大学研制的世界第一个完全自主运动的软体章鱼机器人Octobot[18]、可穿戴的辅助假肢[19]、辅助康复手套[20]等。
本研究综述了目前软体机器人流体驱动方式的类型及其优缺点,同时介绍了其制作方法,分析探讨了流体驱动目前存在的一些问题以及流体驱动的未来发展方向。
1 软体机器人研究现状
1991年,SUZUMORI K等[21]设计了三自由度的FMA(Flexible Micro-actuator),并且基于FMA研制了四指手[22],该软体手具有多个自由度,如图1a所示。2010年BROWN E等[23]研制了一种卡压式的抓手VERSABALL,如图1b所示,可以被动地适应目标物体的形状,通过塞入刚性颗粒,调节膜内的气压,卡压夹具可以迅速变软或者变硬,以抓住不同大小和形状的物体,并且帝国机器人公司已将这种卡压式抓手商业化。2011年ILIEVSKI F等[24]研制了一种基于气动网格的软体手,如图1c所示,可以抓起直径10 cm、重300 g的物体。2014年TOLLEY M T等[10]研制了一种基于气动网格并且完全自主移动的四足软体机器人,如图1d所示,采用硅树脂制作,能适应各种环境,被暴露在火中以及被汽车碾压都能安然无恙;同年,TOLLEY M T等[17]还基于气动网格的结构研制了一款自主跳跃软体机器人,如图1e所示,其运动原理是通过内燃爆炸产生高压气体使其弹性腔膨胀,再通过放气实现跳跃。2017年WEN Li[25]研制的OctopusGripper仿生象鼻助手,如图1f所示,OctopusGripper能够对不同形态、不同大小的物体进行稳定、无损的抓持,并且在工业制造、医疗、康复等领域有着广泛应用前景。ONAL C D等[26]设计制作了一种滚动式软体机器人,如图1g所示,该机器人是由6个等间距的弯曲流体弹性驱动器组成,平行于圆柱体表面,在充气时弯曲并施加扭矩,推动身体向前滚动。2018年KATZSCHMANN R K 等[16]设计了一款液压驱动的软体鱼,如图1h所示,其鱼尾是1个锥形双向的网格,并且软体鱼的顶端安装了1个摄像头,使潜水员可以远程控制和拍摄海洋生物和环境,在未来研究水生生物和探索海底等复杂未知环境上有着巨大潜力。
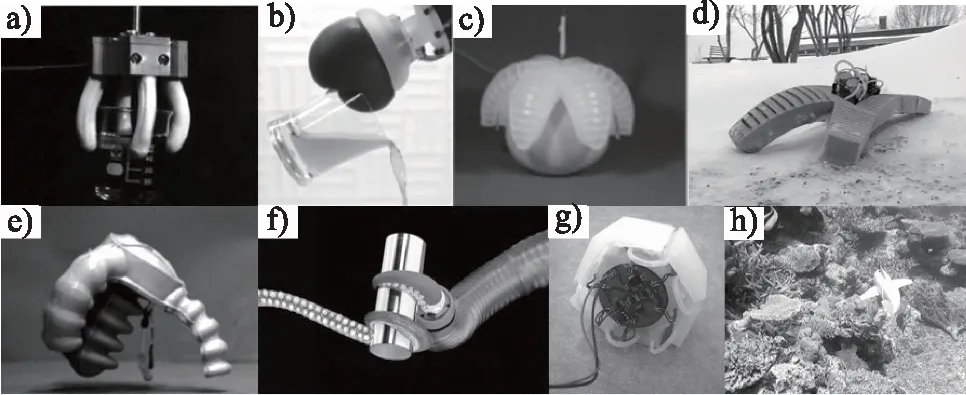
a) 四指软体手[22] b) 球形软体夹持器[23] c) 软体手[24] d) 四足软体机器人[10] e) 跳跃软体机器人[17] f) OctopusGripper[25] g) 滚动式软体机器人[26] h) 软体鱼[16]图1 流体驱动的软体机器人
2 流体驱动类型
按照流体驱动的介质类型,将现有流体驱动方式分为气压驱动、液压驱动和微流体驱动。
2 .1 气压驱动
由于气体具有重量轻、无污染和来源广的特点,因此气压驱动被广泛研究和应用,本研究根据其结构的不同将其分为纤维编织型、螺旋型、网格型、折纸型和特殊型等。
1) 纤维编织型
纤维编织型主要是将纤维缠绕在弹性腔上面或嵌入其中,这是由于弹性腔在充入气体的同时会产生纵向和横向2个方向上的膨胀,因此需要根据设定目标来限制其中一个方向的膨胀,从而实现特定而有效的运动形式,并且通过改变其缠绕的方式还能够产生不同的运动形式。张远深等[27]分析了Mickkien气动人工肌肉研究历程,其结构内部主要是一根橡胶管,橡胶管外层是双螺旋线编织的纤维编织网,两端由连接件固定,一端连接气源,另一端连接负载,当对其充入一定压力的气体时,肌肉收缩产生拉力。
2015年CONNOLLY F等[28]发现通过改变纤维角度,可以使驱动器实现多样的运动,包括轴向扩展、径向扩展和扭转,图2展示的是具有扭转运动的驱动器,其可以利用模块化将不同运动形式的驱动器组合成具有多种运动形式的软体驱动器;与改变纤维编织角度不同的是,POLYGERINOS P等[29]利用纤维在不同方向的增强效果,制作了新的弯曲型柔性气动肌肉,如图

图2 扭转驱动器[28]

图3 纤维增强型驱动器[29]
3a所示为非受压状态下的纤维增强弯曲驱动器,图3b所示为受压状态下的弯曲驱动器。
2) 螺旋型
螺旋型结构的驱动器主要是将单个或多个气动人工肌肉以螺旋线的形式缠绕而成,与传统的气动人工肌肉相比,具有高负载、伸缩率高的特点,并且能够实现扭转、伸长的运动形式。
2017年YAN Jihong等[30-31]提出充气式螺旋纯扭转软体机器人模块,如图4所示,在圆柱体中心处嵌入只能扭转不能伸长的限制层,当给螺旋形内腔充气时,螺旋腔产生螺旋伸缩运动,通过限制层限制弹性体局部轴向应变,实现局部差应变效应,将驱动力转换成扭矩,实现扭转运动。ROCHE E T等[32]利用软体气动人工肌肉设计了一种可植入的柔性驱动器来模拟心脏的自然运动,如图5所示, 将PAM以螺旋和周向的空间排列,螺旋的气动人工肌肉实现扭转功能、周向排列的人工肌肉实现压缩功能,可以用来增强心脏功能受损患者的心肌运动。

图4 软体扭转驱动器模块[30-31]

图5 可植入的柔性驱动器[32]
3) 网格型
网格型主要由一些固定形状的腔室线性或圆周阵列而成,通过其型腔之间相互挤压而产生弯曲和伸缩的运动,其腔室截面有三角形、梯形、U形、方形等。UDUPA G等[33]发现方形的伸长率最大,为70%,而三角形的伸长率最小,只有26%;POLYGERINOS P等[34]根据方形气动网格设计了PneuNet驱动器,其内部结构由多个方形体的腔室线性排列构成,底部含有限制层,通过对弹性腔充入气体,驱动器一侧受弹性腔膨胀挤压变形伸长,另一侧受限制层不伸长,从而产生弯曲运动。
2015年PEELE B N等[35]利用3D打印的双向弯曲柔性驱动器,如图6所示,该结构由PneuNet对称组合构成,具有2个自由度。同样的还有德国Festo公司设计的“仿生象鼻操作助手” BHA[36-38],如图7所示,该仿生象鼻助手的柔性臂由3个并联的气动网格驱动器构成,可以实现全向弯曲。
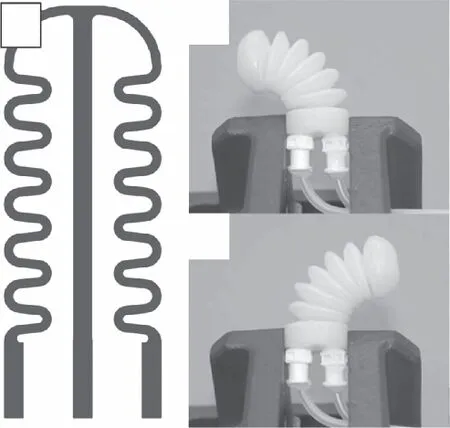
图6 双向弯曲驱动器[35]
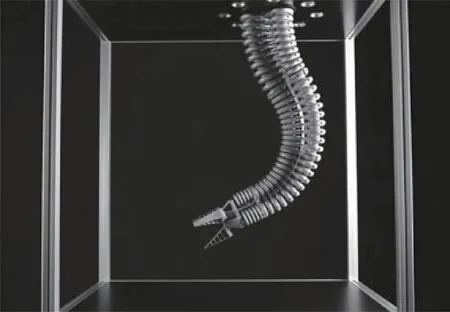
图7 仿生象鼻助手[37]
2018年WANG Tianyu等[39]通过重新调整单个气动网格的腔室角度,设计了一种新的能够大范围耦合弯曲和扭转运动的驱动器,如图8a所示,并且通过计算不同内部压力下斜腔作动器的弯曲和扭转角,发现随着腔室角度的增大,其弯曲能力减小,扭转能力增大;该驱动器还可以抓取管子、圆柱体、剪刀、乒乓球等物品。抓取剪刀如图8b所示。

图8 弯曲扭转耦合驱动器[39]
4) 折纸型
折纸型气动驱动器设计灵感来源于折纸,与一般折纸机器人[40]不同的是,其需要由气动驱动。折纸蕴含数学运算和空间几何原理,并以其独特的结构可塑性和稳定性吸引了许多研究者。根据折纸图案可以将这些折纸型气动驱动器分为Waterbomb式[41]、Yoshimura式[42]、Miura-ori式[43-44]、Square-twist式[45-46]等。
水雷(Waterbomb)图案[47-48]是一种传统的折纸图案,主要有两种类型,分别为八折痕水雷和六折痕水雷,如图9a、图9b所示,实线表示凸折线,虚线表示凹折线。八折痕水雷图案外形为正方形,由围绕中心顶点交替的4个凸折线和4个凹折线组成;六折痕水雷图案则由正方形上面围绕中心顶点的2个凸折线和4个凹折线组成,立体效果如图9c所示。2019年LI Shuguang等[41]研制了一个基于折纸负压驱动的软机器人夹持器,如图10a所示;其中骨架结构来自折纸“魔术球”,如图10b所示。折纸“魔术球”是由一张长方形的纸折叠而成,纸上有重复的水雷图案,每隔一行就用一个半的位来抵消,如图10c、图10d为夹持器的不同角度,可以抓起各种各样的物体,包括食物、重瓶子等。

图9 水雷图案[48]
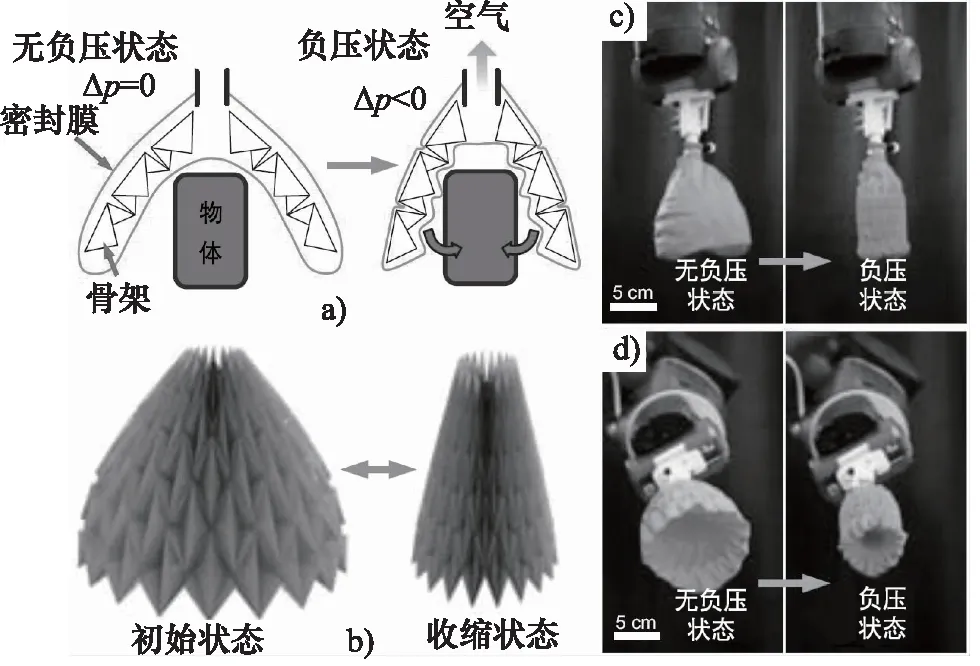
图10 基于折纸负压驱动的软机器人夹持器[41]
5) 特殊型
除了以上的几种类型之外,还有一些特殊的结构类型,例如2017年HAWKES E W等[49]研发了一款新的软体机器人Vine-link Robot,如图11a所示,该软体机器人采用聚乙烯薄膜,分为2个气腔,在尖端安装有摄像机,对环境进行视觉反馈;如图11b所示,其运动原理是,由内部压力驱动的薄膜外翻使更多的材料从底部通过身体的核心拉出,使顶端不断变长从而达到伸长的目的。控制电磁阀使机器人身体左侧腔充气,导致尖端转向右侧,形成右转弯;Vine-link Robot可以举起100 kg的木箱,能通过不同的障碍物,并可以抵御高温火焰。
气压驱动的软体机器人近年来被广泛研究,其结构种类相对于其他驱动方式更多,并且应用于抓取、医疗、探索等领域。气压驱动具有运动形式多样、变形量大、人机交互的安全性好、重量轻和来源广等优点,但是还存在迟滞性和输出力相对较小、控制精度差、需要外接气源等问题。
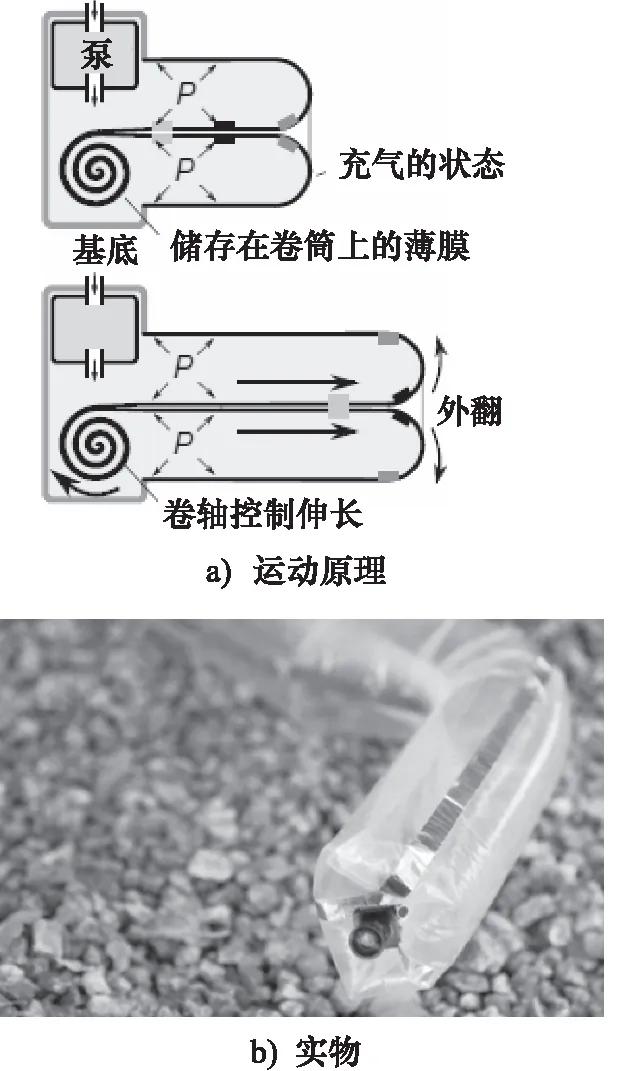
图11 Vine-link 机器人[49]
2.2 液压驱动
液压驱动的介质可以为液压油和水,由于液体不可压缩特性,使得液压驱动的软体驱动器响应速度快,并且能承受高负载,例如2008年柯尊荣等[50]提出了一种以纯水为介质的人工肌肉,结构如图12所示,其工作压力为3~5 MPa,是传统气压人工肌肉的6~10倍。但是由于重量大,且气压密封相对比较困难,因此以液体作为介质的流体驱动软体机器人研究较少,其结构分类和气压驱动分类形式一致。

1.法兰 2.管接螺母 3.密封圈 4.盘形弹簧 5.内部圆锥 6.隔膜软管 7.纯水液压介质 图12 液压人工肌肉[50]
1) 纤维编织型
2012年TIWARI R等[51]设计了一种液压人工肌肉,主要结构是由橡胶管、固定件和编织网构成,并且将其应用在液压单腿上,如图13所示。该液压单腿的髋关节和膝关节运动分别由1对液压人工肌肉的拮抗

图13 液压单腿[51]
作用来控制。
2) 网格型
2019年ISHIDA M等[52]研制了一种以液体为介质的四足软体机器人,如图14所示,其单足结构由3根波纹管并列组成。当向不同的波纹管腔室中施加压力,弹性腔膨胀变形从而产生弯曲变形,通过4个三通电磁阀实现各条单腿的充压与排压,其在静水下的速度为15 mm/s。
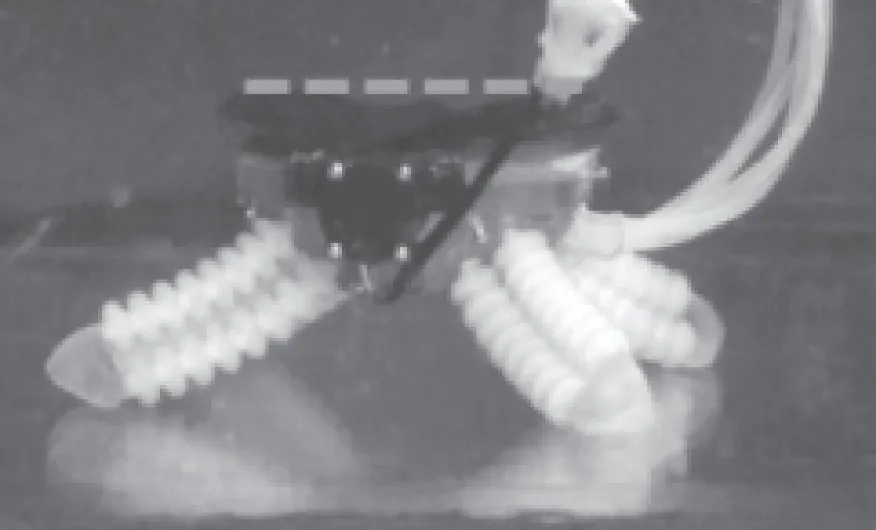
图14 一种水下行走的软体机器人[52]
由于液体介质的特殊性,液压驱动的软体机器人更适合在水下进行探索和求援等,与气压驱动相比较,其响应速度更快、输出力大,而且一般液压驱动采用纯水居多,绿色无污染。由于其不可压缩特性,还可以配合特定泵来搭建循环回路,进而为软体机器人长时间供能。
2.3 微流体驱动
微流体是在微米尺度或微米尺度空间里的流体,在微观尺寸下控制、操作和检查复杂流体的技术被称为微流体技术,并且广泛应用于生物、医疗等领域。赵士明等[53]综述了微流体驱动与其控制系统。本研究所介绍的微流体驱动方式主要是将传统微流体技术应用在软体机器人。
2014年MORIN S A等[54]利用了微流体技术,研制了具有伪装功能的软体四足机器人,如图15所示,其结构主要由提供驱动的柔性驱动器和提供变色的彩色层(图中显示为白色部分)构成。柔性驱动器是独立的气动腔室,而彩色层是薄薄的微流体网格。变色原理是通过对微流体网格通道注入彩色液体或温度来控制软体机器人整体的颜色。
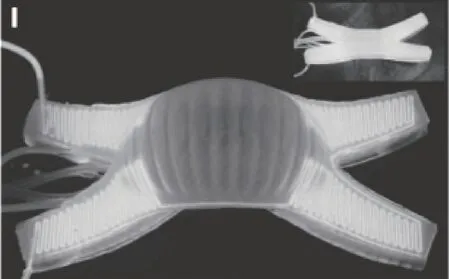
图15 变色的软体四足机器人[54]
2016年WEHNER M等[18]研制了世界上第一款完全自主的软体章鱼机器人,如图16所示。通过微流体技术研制了微阀与微流体逻辑电路来控制调节流体流动,流体是由注射泵注入过氧化氢溶液在催化剂的作用下产生的气体,进而控制8条腿的驱动和排气分配,实现软体机器人的运动。

图16 章鱼机器人[18]
微流体驱动可以通过微阀、微泵和微流体逻辑控制系统来实现无电子化的软体机器人自主运动[55],从而可以应用于海上油气等极端环境中;还可以改变微流体的颜色用于伪装机器人,使其更好的融入周围环境,来保护自己或进行探索活动;但是微流体驱动具有结构复杂、制作成本高等缺点。表1是关于流体驱动的各类方式的优缺点比较。

表1 流体驱动的各类方式比较
3 制造技术
传统刚性机器人系统的制造方法不适用于柔性材料的制造,随着快速数字化设计和制造工具的发展,研究人员利用快速和适应性强的制造技术制造了复杂的软体机器人系统,文献[56-58]综述了软体机器人的制作工艺。目前,流体驱动的软体机器人主要采用了形状沉积(SDM)、软光刻、失蜡铸造、多步成型、3D打印等制作技术。
图17是SDM的原理图[56],通过这个过程,可以把刚性材料和柔性材料组合成一个部分,适用于制造具有先进功能的柔性机构,如传感器、电路等,可嵌入软体机器人中。

图17 SDM工艺示意图[56]
如图18为软光刻的制造流程示意图,其制造流程主要分为三步:
(1) 将液态的硅橡胶倒入上下模具中;
(2) 固化后取出,并将连接面浸在一层未固化的弹性体中;
(3) 将两层材料连接在一起固化。
失蜡铸造可以加工复杂形状的内部通道由于是一次成型,提高了驱动器整体的性能。以鱼尾制作工艺[57]为例,如图19所示。其制作过程:浇注并固化橡胶模具;浇注蜡芯;装配各模具;将硅橡胶和玻璃泡的混合物倒入尾部模具中,使其固化;用烤箱将固化的鱼尾中蜡芯熔化;利用沸水进一步去除剩余的蜡。

图18 软光刻工艺示意图[57]

图19 失蜡铸造工艺示意图[57]
由于纤维编织型的驱动器外表大多缠绕有增强纤维,其本体主要采用的成形方法大多与多步成形工艺[29]类似,制作过程也包含了传统的浇筑法[59],如图20所示,其制造过程主要是:通过3D打印模具并将其浇筑成形;将应变限制层附着在执行机构的平面上;缠绕纤维增强线;将整个执行机构放入模具用硅胶密封;用模制的硅胶密封管的一端。

图20 一种弯曲驱动器的制造[59]
3D打印是一种增材制造(AM)过程,目前主要的3D打印技术[60]主要有SLP(Stereo Lithography Plater)、SLS(Selective Laser Sintering)、熔融沉积打印、喷墨打印等,通过3D打印使软体机器人的本体一次成形提高了效率。PEELE B N等[35]利用掩模投影立体光刻(DMP-SL)制造了多自由度的软体驱动器;MACCURDY R等[61]通过多材料3D喷墨打印系统,一步完成了液压驱动六足软机器人的制作,包括波纹管执行器、软爪和齿轮泵等零件。
4 分析与讨论
随着软体机器人的研究热度越来越高,也产生了较丰富的成果,尽管流体驱动被广泛研究,并且有一部分软体机器人已经应用,但是在材料、制作、建模与控制等方面还存在一定不足,比如在精度、重复性上都比较差,同时流体驱动需要笨重的外部设备供能,灵活性较差。
从流体驱动的软体机器人的研究现状来看,未来可以从下面几个研究思路入手:
(1) 软体机器人的材料多为硅橡胶或Ecoflex系列,流体驱动的软体机器人的运动主要依靠弹性腔的膨胀或收缩,在实际应用中有可能因为工作任务或环境导致弹性腔破裂,使软体机器人不能正常工作。研究新型的自愈型柔性材料使撕裂和穿孔的弹性驱动器[62-63]可以自修复,可以大大提高软体机器人的性能。现有传感器大多都是刚性的,无法满足软体机器人的需求,通过嵌入的曲率和接触柔性传感器[64]有利于监测软体机器人在施加压力下的变形和提供触觉反馈,并且有利于形成闭环控制。柔性传感器技术,目前仍然处于起步阶段,研制新型柔性材料和柔性电子元件会是一个研究方向;
(2) 国内许多软体机器人的制作仍然以哈佛大学的多步成形、软光刻等制造工艺为主,其制造工艺过程中依赖手工制作,容易引起制作效率低、精度低、成品合格率不高等问题。通过3D打印技术更加高效快捷,减少了上述手工制作带来的问题,并且也能够在成形过程中直接嵌入柔性传感器,使其具有较高的集成性,因此3D打印会是其未来的一个研究方向;
(3) 软体机器人采用了柔性材料,同时流体驱动的软体机器人运动原理来源于弹性腔的膨胀或缩小,具有非线性。并且有的软体机器人自由度高度冗余,在一些环境下很容易发生被动形变,难以实现精确建模与控制。目前,软机器人建模主要采用分段常曲率(PCC)[65]、刚性梁理论[66]或有限元分析[67]等方法,但是其模型的精度和准确性还有待提升,更加准确的建模方法也是未来一个研究方向;
(4) 相比于刚性机器人,软体机器人柔顺性更好,人机交互更加安全,但是软体机器人有时在实际工作环境中需要较大的输出力矩和稳定的姿态,在有些环境下很容易受到自身重力或外力的影响发生被动形变,因此实现软体机器人的变刚度能力尤为重要。JIANG Yongkang等[68]提出了链状颗粒干扰方式。YANG Yang等[69]提出了层干扰和颗粒阻塞两种混合的变刚度方式。ZHANG Yuanfang等[70]将形状记忆合金嵌入气动柔性驱动器中,使驱动器刚度提高了120倍,因此可变刚度也是一个未来研究方向;
(5) 一张纸可以根据折叠的方式被折成许多三维的形状,而折痕图规定了所需的折叠,如何设计有效的折痕图使其能折叠成需要的结构形式,这需要算法来支持。DEMAINE E D等[71]提出一种算法,使任何多面曲面都可以由足够大的方形纸折叠而成。由于折纸的可塑性和稳定性,将折纸与软体机器人结合的折纸型软体机器人将在各领域有很大前景,而新的折纸算法是一个研究方向;
(6) 与流体驱动依靠流体通道类似,微流体技术在微观上构建微流体通道系统来实现各种复杂的微流体操纵功能,通过微流体技术可以使未来的软体机器人更加集成化,微型化,并且具有伪装功能,这可能会是未来的一个研究方向;
(7) 流体驱动的软体移动机器人大多不能完全自主运动,需要通过一根传输流体的管带与之相连接,进而为软体机器人的运动提供能源,并且传统的气压源或液压源体积较大,大大限制了其自主性和实际应用的普及。有的研究者利用化学反应产生气体来提供能源[17-18],KATZSCHMANN R K等[16]设计的液压驱动机器鱼,利用齿轮泵来构建了液压循环系统,通过循环流体装置,为其制作的软体机器鱼长时间的提供动力。如何设计供能装置从而提高自主性会是一个研究方向。
5 结论
软体机器人采用了柔性材料制作,具有较好的柔顺性,在人机交互上更加安全。与其他软体驱动方式相比,流体驱动的软体机器人变形大、反应速度快,从而被广泛的研究。本研究主要针对软体机器人流体驱动方式进行了阐述,并且将流体驱动分成气压、液压、为微流体等三大类型,同时根据气压驱动的结构类型,将其分成纤维编织型、螺旋型、网格型、折纸型和特殊型。介绍了其流体驱动的软体机器人的制作方法,通过对流体驱动器现状的分析和讨论,得出了未来的几个可能的研究方向:新型柔性材料与柔性电子元件、3D打印、新的建模方法、折纸算法、可变刚度、微流体技术、供能装置等。
流体驱动的软体机器人在医疗、探索、抓持等领域都有很好的应用前景,无论是软体机器人还是传统刚性机器人,其目的都是为了更好地为人类服务,科学是不断进步的,随着材料、3D打印、控制、新能源等多学科的发展,未来流体驱动的一些不足将会被解决。
