基于电动推杆的AUV 水下释放方法
2021-04-23徐少刚
徐少刚
(上海交通大学 船舶海洋与建筑工程学院,上海 200240)
0 引言
自治潜航器(AUV)释放面临诸多挑战,如快速反应和隐蔽性要求,释放时容易受海流等环境扰动以及释放后存在与平台发生碰撞的风险[1],因而释放控制方法需要具有较强的有效性和安全性。国内外学者对此展开了深入的研究,提出了多种AUV 载荷释放方法,如基于Unmanned surface vehicle(USV)释放方法[2-3]以及飞机空投释放方法[4-5],重力法和推冲分离法[6-7],载荷侧向分离法[8-9]等。这些释放方法虽然大多可以实现载荷稳定可靠地释放,但是基于USV 的释放和飞机空投释放法会受到海况的干扰,且隐蔽性较差;而重力法和侧向分离法容易破坏释放平台的重浮力平衡和姿态稳定,增加了AUV 释放时平台的控制难度和能量消耗。因此,研究设计一套将AUV 自动推出的水下释放机构,在满足隐蔽性的要求下使AUV快速释放,且不会对释放平台产生较大的影响。
目前国内外学者对于永磁同步电机的控制研究[10-12]较为成熟,但是较少地应用在水下载荷释放的电动推杆机构上。本文采用三相永磁同步电机(PMSM)来驱动电动推杆,并利用气动装置为释放筒内加压使内部压力与外界水环境压力平衡,以降低AUV 释放时的能量消耗。
基于电动推杆设计AUV 水下载荷释放系统,然后建立考虑负载变化的电动推杆动力学模型,利用Linear quadratic regulator(LQR)方法优化外回路的Proportional–Integral(PI)控制器参数,实现电动推杆以较快速度将AUV 推出到目标位置,通过实验验证了水下载荷释放控制方法的有效性。
1 基于电动推杆的AUV 水下释放系统设计
AUV 水下释放系统组成和工作原理如图1 所示,其组成包含气动加压装置、电动推杆、载荷AUV 及释放筒。

图1 基于电动推杆的AUV 水下释放系统
气动加压装置主要由以下部分组成:①高压气瓶,用来提供气源;②压载水舱,用来补偿载荷释放带来的浮力损失;③气阀、水阀,用来控制气体和压载水的流动。
电动推杆主要组成:①三相永磁同步电机(PMSM),用于驱动推杆;②丝杆电缸,用于将载荷推出;③限位开关,防止超出行程使电机过载;④编码器,用来实时反馈位置和速度;⑤电机驱动器,用来连接编码器构成位置和速度控制闭环。
AUV 释放筒用于为AUV 提供低压环境和隐蔽放置容器。
载荷释放指令下发后首先启动气动加压装置,利用高压气推水使AUV 释放筒内压力和外界水压保持平衡。然后启动电动推杆将AUV 释放筒盖打开,并以指定速度快速推动AUV 到目标位置。
2 电动推杆和载荷建模
电动推杆采用表贴式三相永磁同步电机(PMSM)驱动,为简化分析和便于控制器设计,做出理想电机假设:①空间磁场呈正弦分布;②磁路不饱和;③忽略了磁滞和涡流损耗的影响。
2.1 坐标系定义
三相永磁同步电机的数学模型主要采用两种坐标变换,即静止坐标变换(Clark 变换)和同步旋转坐标变换(Park 变换),二者关系如图2 所示,图中ABC是自然坐标系,α - β是静止坐标系,d-q是同步旋转坐标系。

图2 三相PMSM 坐标系
2.2 电动推杆的动力学模型
根据2.1 中坐标系定义,选择d-q同步旋转坐标系建立电动推杆的动力学模型,三相PMSM 定子电压的方程为:

其中ud、uq为定子电压的d轴,d轴分量;id、iq为定子电流的d轴,q轴分量;ψq、ψd为定子磁链的d轴,q轴分量;Rs为定子的电阻;ωe为电角速度。
定子磁链的方程:

其中Ls为定子的电感,和表贴式PMSM 定子的d轴和q轴电感相同,ψf为永磁体的磁链。
将(2)式代入式(1)得出定子的电压方程为:

又因为电磁转矩的方程:

其中Te为电机的电磁转矩,np为电机的极对数。
另外,

其中ω为电机的机械角速度,Nr为电机的每分钟转速,θ为电机的转角,x为电动推杆的位移,l为电动缸丝杆的导程。
电机的机械运动方程:

其中ω为电机的转动惯量,B为电机的阻尼系数,TL为负载力矩(AUV 和释放筒盖)。
综上,将式(4)代入式(6),再联合式(3)可得,永磁同步电机的动力学模型为:

采用id=0 的转子磁场定向控制法,上式可化简为:
根据式(8)可建立电动推杆的动力学模型。
2.3 载荷动力学模型
建立AUV 和筒盖的载荷动力学模型,就能计算电动推杆的负载力矩:
AUV 动力学模型为:

其中MRB,MA分别为刚体惯性矩阵和附加质量矩阵,CRB,CA分别为刚体和附加质量的哥氏-离心力矩阵,D(ν)为阻尼矩阵,g为恢复力矩阵,ν为AUV 的速度,τ为控制力矩阵。
释放筒盖的动力学模型为:

其中M为筒盖质量,Zw˙为筒盖附加质量,Zw为筒盖一阶阻尼项系数,为筒盖二阶阻尼项系数,F为控制力,G为筒盖重量,Ff为筒盖与筒壁的摩擦力。x为筒盖位移,L为筒盖最大行程。
3 永磁同步电机外回路LQR 控制
因电机驱动器固件已将内回路的电流环PI 控制器参数固化,因此采用LQR 法对三相PMSM 电机外回路位置环、速度环的PI 控制器参数进行优化。
3.1 永磁同步电机外回路状态空间方程
因电动推杆位移x与电机转角θ呈线性关系,为方便将控制目标设定为电机转角,定义误差角eθ:

其中θd为电机的目标转角。
定义永磁同步电机的状态变量为x=[x1,x2,x3],

定义控制量u = Te,对式求导得:

写成矩阵形式如下:
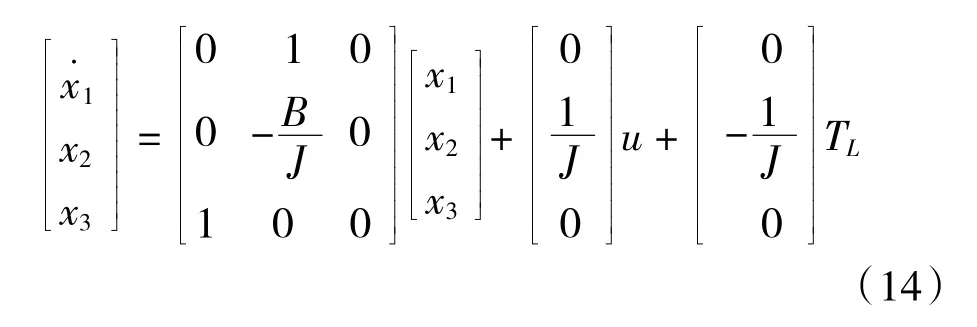
则状态空间方程可描述为:


3.2 LQR 控制
线性二次型调节器(LQR)控制是一个最优控制问题,系统状态方程是线性的,代价函数是二次型的,约束条件包含状态初始条件并且无干扰输入,其代价函数的表达式为:

其中Q和R为加权矩阵,Q是对称半正定阵,R是对称正定阵。
在LQR 最优化控制中,寻找系统的反馈矩阵K,得到最优控制律u,使二次型性能指标J达到最小值。
求解反馈矩阵K的方法是利用Riccati 方程:

矩阵P需满足上述方程,最优控制问题为求解矩阵P:

P矩阵为上述方程的半正定解,可求得:

3.3 LQR 控制参数设计
已知PMSM 的模型参数如表1 所示。

表1 PMSM 模型参数表
选取LQR 控制器的P和Q控制参数如下:
求解Riccati 方程,可得K矩阵如下:

4 水池实验
根据本研究的AUV 水下释放机构总体设计方案,完成了AUV 释放控制系统实物设计与组装,并在试验水池中进行AUV 水下释放试验,水下平台的AUV 释放筒内外的压力传感器的采样周期为125 ms,电动推杆系统的电机编码器采样周期为50 ms。
AUV 水下释放策略:释放平台下沉到水下5 m,3 min 后开气阀、水阀,通过压力传感器检测到内外压力平衡后启动电动推杆,将AUV 释放筒盖打开,同时推杆以速度20 mm/s 将AUV 推出。
水池实验结果如图3 所示。

图3 水池实验结果
根据(a)推杆位移和速度变化曲线可知,电动推杆顺利启动:释放筒内外压力平衡为0.1548 MPa 时,达到释放条件,推杆立即启动,以速度20 mm/s 将AUV 推出19 cm。
根据(b)推杆负载力矩变化曲线可知:电动推杆在推出的过程中,开始负载力矩较小为-0.1143 N·m;在推杆推出到105 mm 位置时,需要克服载荷AUV和筒盖的阻力,负载力矩开始剧烈增加,在推杆位移为115 mm 时,达到最大-0.8382 N·m;筒盖完全打开,且推杆将AUV 完全推出后,负载力矩又下降到-0.127 N·m。
5 结束语
基于电动推杆的AUV 释放机构建立的电动推杆、载荷的动力学模型,采用LQR 法对控制器参数进行优化后开展水池实验,证实了AUV 水下释放机构具有较好的快速反应能力和隐蔽性。水下释放控制方法可控制电动推杆将释放筒盖打开,同时以指定速度将AUV 快速推出到目标位置,且释放平台基本不受载荷释放影响。在水下平台浮态自保持的情况下实现AUV 安全快速水下释放。
