水下推进系统动力学建模及控制
2021-04-23邓旭
邓 旭
(上海交通大学 船舶海洋与建筑工程学院,上海 200240)
0 引言
水下机器人在海洋资源探索、海底地形测绘以及军事战备等领域均具有很高的应用价值。而推进器是驱动水下机器人运动的关键设备[1],对水下作业的精度有很大的影响,推进设备包括电机推进、液压推进、喷射推进、仿生推进、滑翔推进、磁流体推进和混合推进7 种[2]。作为最常用的推进系统,电机推进以电机作为驱动源,带动螺旋桨转动,产生推力。大型或者对操纵要求高的水下机器人,往往会配备多个电机推进器构成一个矢量推进系统,以保证提供足够的驱动力或者灵活的操纵。同时,现在多数水下机器人引入闭环控制算法实现自主运动控制,多数针对水下机器人的控制器输出均为广义力/力矩。而在实际工程应用中,直接输出到推进器系统的是控制信号(PWM 信号或者模拟电压信号)[3],并不能直接对推进系统输入广义力和力矩。现在常用的方式为映射求解方法,即对推进器推力和控制电压的关系进行拟合,通过所需的推力值求解计算得到推进器需要的控制电压,且认为推进器的推力响应是瞬时完成的而忽略了推进器的动态特性[4]。
一些学者针对水下推进系统的响应特性展开了研究工作。1990年,YOERGER 等[5]最先研究了推进器特性对水下机器人运动的影响,针对转矩控制的推进器,在考虑进速的情况下,建立了推进器的动力学模型,并且设计了三种控制器进行转速跟踪控制。LOUIS 等[6]针对推进器的非稳态控制问题,通过试验,在遥控无人潜水器(Remote Operated Vehicle,ROV)定位控制中比较了三种控制策略的优缺点,三种控制策略分别是前馈控制(开环控制)、转速反馈控制和基于模型的转速控制,最终得出结论:基于模型的转速控制在ROV 较大的作业范围内均表现出了更好的控制性能。FOSSEN[7]等在无人水下航行器(Unmanned Underwater Vehicle,UUV)纵荡运动中考虑螺旋桨的特性以及螺旋桨进速对推力的影响,将UUV的纵向速度和螺旋桨轴向进水流速作为状态量,设计了以推进器转速为控制输入的二阶非线性系统,并设计扰动观测器对螺旋桨轴向进水流速值进行观测。最终通过设计双环控制器实现纵向控制。Chu 考虑了推进器地动力学特性,建立了三阶水下机器人动力学模型,推进器模型被简化成一阶非线性系统,ROV 和推进器地模型通过神经网络训练得到,基于反步法设计了控制器,并且通过比较发现,控制目标转速经滤波处理后,可以有效地抑制线电流的突变峰值。最终在轨迹跟踪控制中证明了算法的有效性。
上述对推进器的研究在实际应用中主要存在以下两点阻碍:(1)在水下机器人自主运动控制的实际应用中,推进器的输出推力是很难被测量,因此推力很难直接作为推进器闭环控制系统的状态反馈量。(2)随着数字化技术的普及,水下机器人的控制系统多为数字计算机控制,在一个采样周期内,输出到推进器的信号值保持不变,而上述研究均是基于连续系统开展的。
本文针对三相无刷直电机驱动的水下推进系统,对其动力学特性建立离散模型,并设计一种新型离散滑模推进器转速控制器,引入一种新型自适应趋近律,一方面可以加快滑模函数的收敛速度,另一方面可以有效地消除控制器输出的抖振现象。
1 推进器动力学建模
三相无刷电机驱动的推进系统模型主要包括三项无刷电机的电压模型和电机转子的转动模型两个部分。
1.1 电压方程
推进器使用的三相无刷电机电子定子绕组为Y型接法,驱动电路为三相全桥电路,工作时保证只有两路处于导通状态。为了简化无刷直流电机的电压数学模型,假设:
(a)铁芯饱和,涡流无损耗,齿槽效应和磁滞无损耗。
(b)电机的三相绕组完全对称。
(c)二极管和功率管为理想元器件。
基于上述假设,建立三相无刷电机的电压方程:

其中,R为相电阻(Ω),L为绕组自感(H),M为绕组互感(H),us为相电压(V),is为相电流(安培),ω0为电机转速(rad/s),es为反电动势,es=keωs,ke为反电动势常数。
根据式(1),得到如图1 所示的等效电路图。
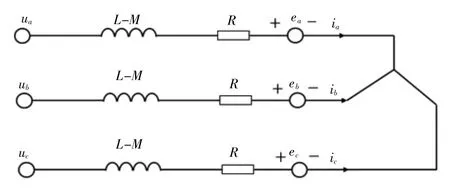
图1 三相无刷电机等效电路图
1.2 转动方程
在忽略磁损耗及转子摩擦损耗的情况下,电机转子输出功率可以表示为

其中,Te0为电机转子驱动转矩(N·m)。
由于每一时刻三相电机中仅两相导电,所以电机转子输出转矩可表示为[8]:

设连接电机转轴与螺旋桨转轴的减速器的减速比为nb,即ω0=nbω,则在忽略传动损耗情况下可得螺旋桨转轴的输入转矩

据牛顿第二定律可得推进器转子转动方程

其中,TL为螺旋桨在水中转动受到的负载转矩,B为阻尼系数,J为所有转动部件的综合转动惯量。

式中,ρ为水的密度(kg/m3),D为螺旋桨直径(m),a1,a2为表征螺旋桨转矩特性的两个系数。
1.3 推进器动态模型
以控制电压us以及螺旋桨进口水流速度va为输入,以螺旋桨转速为输出,建立推进器的动态模型。
由于电机的电气时间常数远小于器机械时间常数,且对于水下推进器的应用来说,往往很难获得内部电流的反馈数据,因此电压方程(1)可以简化为稳态形式:

根据式(4)-(7)得:

在数字计算机控制系统中,推进器的转速模拟电压信号通过A/D 卡采集,控制信号模拟电压则由D/A卡输出,在一个采样周期内,采集的转速值和输出的电压值均是零阶保持的。因此,取采样周期T=0.001 s,则可以将式(8)进行欧拉前向差分离散处理[9],同时考虑存在一定的外界总扰动,得到离散化的动力学方程:

式中,dk=O(T)为外界总扰动,各参数定义如下:

以天津昊野公司的T530 型推进器为例,其推进器参数见表1。
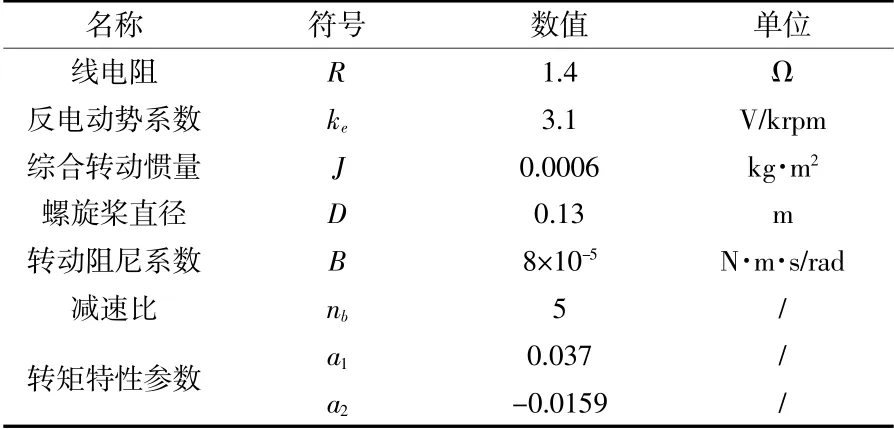
表1 推进器参数
根据表1,可以得到式(10)中的参数取值为:k1=345.4,k2=51.25,k3=-0.057,k4=1.18。
1.4 推进器推力特性
推进器的推力由螺旋桨产生,学者们根据大量螺旋桨实验,构建了螺旋桨推力(N)与转速(rad/s)之间的表达式:

式中,KT为螺旋桨的推力系数,b1和b2为表征螺旋桨推力特性的两个参数,其中b1=0.4196,b2=-0.4271。在进速va已知的情况下,可以通过式(11)计算得到推进器转速和推力之间的关系为:

2 离散滑模推进器闭环控制算法
2.1 滑模面及趋近律设计
离散滑模控制方法中的趋近律概念最早由高为炳[10]提出,提出趋近律的初衷是为了更好地改善滑模变量到达滑模面的形式,并且抑制由于有限的采样周期而带来的抖振现象。该方法一经提出,便引起了大批学者的关注,许多基于趋近律的离散控制策略被相继提出。这些文章主要进行了两个方面的改进研究,一是加快趋近速度,使滑模函数可以更快地到达滑模面;二是减小滑模函数最终的收敛域,以减小抖振现象的产生。
设计离散滑模控制方法主要分为两个阶段:(1)设计一个状态量收敛的滑模函数;(2)设计一个合适的趋近律,使滑模函数最终到达原点。
本文首先采用如下形式的积分滑模函数[11]:


其中e为自然底数,0<α2<1。
同时,在系统存在外界扰动的情况下,趋近律中引入扰动补偿,趋近律形式可以表示为:

其中:
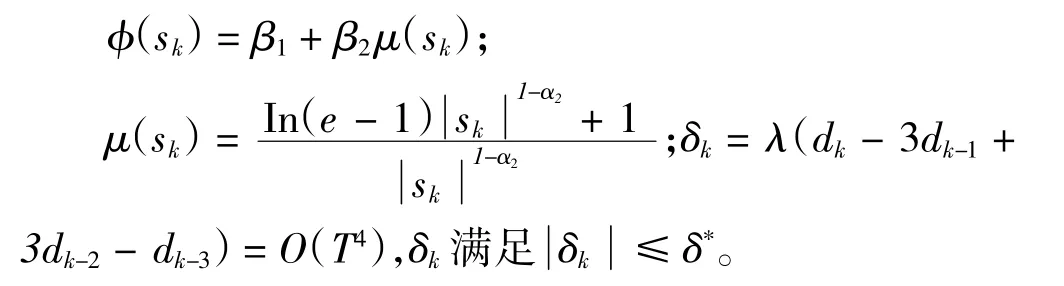
易知,μ(sk)是随着单调递减的函数,通过洛必达法则,可以得到和0。因此,有以下结论:

2.2 控制律设计及稳定性证明
根据(13)定义的滑模函数,可知下一时刻的滑模函数:

将式(18)代入式(15),可得:

将推进器转速离散方程(9)代入上式,则可以求得控制律为:

其中,采用历史值计算dk-i(i=1,2,3):

定理1:在控制律(20)和趋近律(15)的作用下,从任何初始状态s。出发的滑模函数sk最终都将进入到准滑动模态域Ω 内,其中:

证明:
定义Lyapunov 函数:

根据趋近律(15),则有:

△Vk<0 等价于:

或者


因为2 -φ(sk)T>φ(sk)T,所以当时,都有△Vk<0 恒成立。最终,sk会进入到Ω 中。
3 推进器转速闭环试验
根据式(12)可知,可以将推进器的期望推力τd转化为螺旋桨的期望转速ωd,则可以对推进器设计转速闭环控制器以跟踪到期望转速,即推进器输出的推力为期望推力。对本文所选的推进器设计转速闭环控制试验,以系柱情况(va=0)为例,控制系统设计如图2 所示,通过A/D 卡采集推进器转速,通过D/A 卡输出模拟量控制电压。在对推进器建模的过程中,用到的电压值为电机内部驱动电压(-48 V~48 V),而实际推进器外部接口提供的是信号模拟电压(-5 V ~5 V),这里可以认为电机内部驱动电压和信号模拟电压之间为线性映射关系,则可以将控制器的控制电压等比例缩小后输出为推进器的信号模拟电压。

图2 推进器闭环控制系统原理图
控制器参数取为:λ= 0.5,α1= 1/3,α2= 1/2,β1=75,β2=75,分别进行定转速控制试验(目标转速为1000 r/min)和转速跟踪控制试验(目标转速函数为y=1000+500 sin(0.5t),试验结果如图3 和图4 所示:

图3 推进器定转速控制试验

图4 推进器转速跟踪控制试验
从图3 中可以看出,对于定转速控制问题,该控制策略可以快速地使滑模函数sk从初始值约-47 收敛至原点附近,推进器的转速反馈值也在0.5 s 达时到达设定目标1000 r/min,并且稳定在设定目标转速附近;从图4 中可以看出,对于变转速的跟踪控制问题,该控制方法仍能在1 s 左右使滑模函数收敛至坐标原点,尽管随着目标转速的变化,滑模函数在原点附近有小范围的波动,但推进器的转速反馈值始终能较为准确地跟踪到目标转速。另外,从图3 和图4 中的信号模拟电压值变化曲线可以发现,设计的控制器输出电压并未出现在锯齿状的高频抖振现象,曲线较为光顺,说明在趋近律设计中引入的对数自适应项能消除滑模函数在sk=0 附近的抖振问题。
4 结束语
针对水下机器人的运动控制的实际应用中存在的底层执行机构控制难问题,本研究对常用的三相无刷电机驱动的推进器进行了建模分析,并采用离散滑模控制方法,设计了一种自适应无抖振趋近律,基于此趋近律设计了控制器,最终在推进器闭环控制试验中验证了算法的快速性和有效性。该项研究的理论和试验成果可以用于水下航行器的运动控制,作为推进器的底层驱动控制程序,可以将顶层的航行器控制力/力矩指令转化成底层的推进器目标转速指令,由推进器转速控制实现对目标转速的跟踪,进而输出控制力/力矩,控制水下航行器的运动,实现底层推进器驱动转速的自主化。
