基于约束模型试验的帆船操纵性模型辨识
2021-04-23陈宇航
陈宇航
(上海交通大学 高新船舶与深海开发装备协同创新中心,上海 200240)
0 引言
近年来,随着社会环保意识提高与化石能源日益枯竭,人们着眼于寻找和开发绿色新能源,并将其运用于各行各业。帆船以清洁能源风能作为动力,不需要外界燃料补给就能够在海上长时间航行,是海洋监测以及航运智能化的优良载体,故帆船相关研究成为船舶行业的新兴方向,其中将帆船与人工智能相结合的无人帆船更是帆船研究中的前沿课题[1]。国内外均有学者进行过帆船水动力及其辨识相关研究。
Masuyama Y 等[2]专门针对帆船逆风航行过程进行研究,提出了分离式船体水动力模型与逆风航行状态下的空气动力学模型。Sutulo S 等[3]开发了一套从自航试验中识别船舶操纵性数学模型的算法。Araki M 等[4]使用试验,系统仿真和CFD 模拟3 种方式得到了船舶静水水动力数据。Kerdraon P 等[5]基于六自由度水动力模型,开发了一种分析近海帆船动力学特性的数值工具。上海交通大学的廖珂[6]设计制造了1 艘能够面对海洋复杂环境的海洋监测用小型无人帆船。河海大学的Xu P F 等[7]将最小二乘支持向量机(LSSVM)与布谷鸟搜索(CS)算法相结合,用于识别水面航行器的三自由度运动方程。朱锋等[8]基于遗传优化算法,对复合三体船纵摇及垂荡运动数学模型进行系统辨识。综上可知,帆船操纵性模型辨识具有广阔的研究前景与重大的研究价值。本研究旨在探索一种便捷、高效、准确的构建无人帆船水动力模型的方法,为无人帆船提供其控制所需的精确水动力模型。
1 帆船操纵性数学模型
1.1 帆船坐标系设定
帆船坐标系如图1 所示。全局坐标系O0X0Y0Z0为固定在地球表面右手坐标系,X0轴正向朝正北,Y0轴正向朝正东,Z0轴正向朝下;局部坐标系OXYZ为固定在船舶甲板面的右手坐标系,X轴正向指向船首,Y正向指向右舷,Z轴正向垂直于XOY平面向下,O位于船舶重心位置。
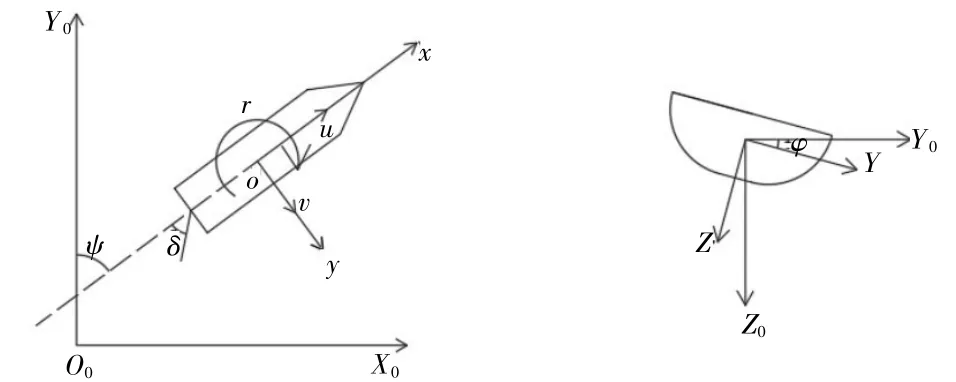
图1 帆船坐标系示意图
图1 中u为船舶的纵向速度,v为横向速度,r为转艏角速度,ψ为艏向角,δ为舵角,φ为横倾角。方向规定如表1 所示。

表1 速度及姿态角方向
1.2 帆船分离式操纵性数学模型
船舶的操纵方程的数学模型目前主要分为2 类:(1)以Abkowitz 为代表的整体式模型;(2)以Maneuvering Modeling Group(MMG)为代表的分离式模型。整体式模型是将船机桨看成一个整体,模型将作用在整个船上的力和力矩表达为速度、加速度、螺旋桨转速、舵角等控制因素的多元函数[9],但是这个系统的水动力导数十分复杂,无法计算得到。分离式模型则将船、桨、舵分开,将作用在整个船体的力和力矩分解到了船体、螺旋桨、舵上,各项具有明确的物理意义[10],通用性比起整体式模型更强。本文也选择分离式模型作为帆船的水动力模型形式。
帆船在水平面的运动包含纵荡、横荡、艏摇3 个自由度,但帆船的横摇与横倾比常规船只更加剧烈,会对帆船的水平面运动产生不可忽视的影响,故本研究以标准MMG 模型为基础,结合帆船的动力学特点,将横倾等考虑在内,构造了新的帆船三自由度分离式数学模型:
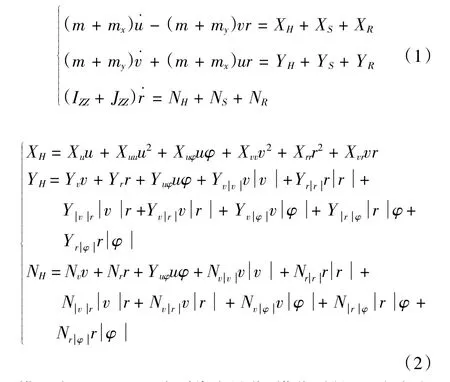
模型中XH,YH,NH分别代表纵荡、横荡、艏摇2 个自由度的水动力;XS,YS,NS分别代表纵荡、横荡、艏摇3 个自由度的风帆力;XR,YR,NR分别代表纵荡、横荡、艏摇3 个自由度的舵力。本研究重点在帆船的水动力导数,水动力导数只与帆船本身结构特点有关,与风帆力和舵力等控制力无关,故将风帆力、舵力与水动力分离,只考虑帆船裸船体的水动力特点。
帆船空船质量m为27.229 kg,附加质量与附加转动惯量使用经验公式[9]计算,结果见表2。

表2 帆船附加质量
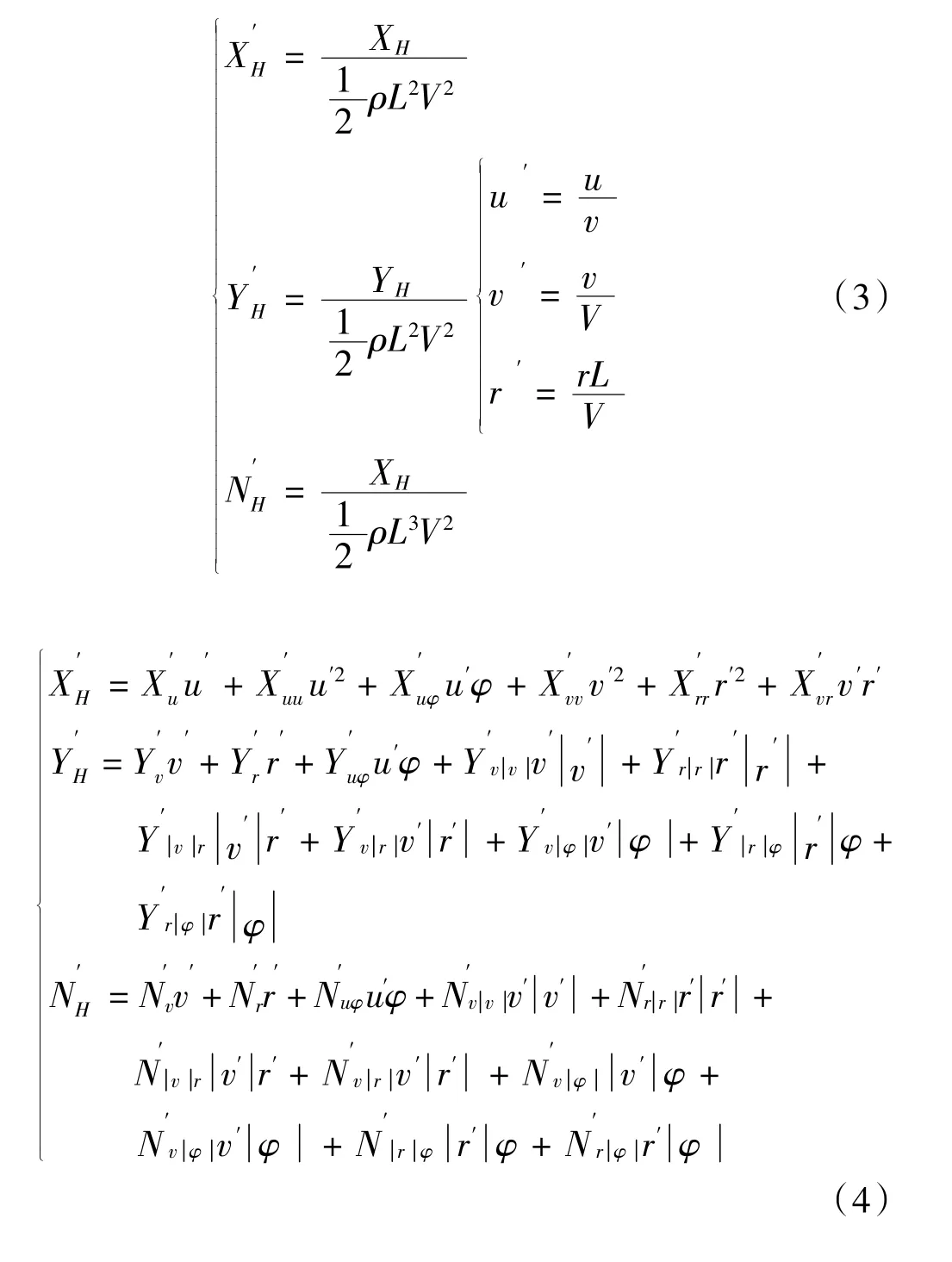
为了便于比较不同船舶水动力的特点,对水动力模型进行无因次化处理,用式(3)对式(2)进行无因次化处理得到无因次化水动力模型:
2 约束模型试验(PMM 试验)设计
2.1 试验设备
2.1.1 上海交通大学风洞循环水槽
试验在上海交通大学国家重点实验室-风洞循环水槽进行。上海交通大学循环水槽由风洞和循环水槽共同构成,本研究只针对船体的水动力性能,故只使用循环水槽。循环水槽为垂直型,计测部分长8.0 m,宽3.0 m,水深1.6 m,最大流速3 m/s。使用循环水槽的数控平面运动机构(图2)控制船模精确执行规定试验内容,除完成常规的阻力、横荡、艏摇、带漂角艏摇试验外,还要完成带横倾角的帆船平面运动机构试验,用以研究横倾对帆船运动的影响。

图2 上海交通大学循环水槽及平面运动机构
2.1.2 案例帆船
案例帆船以沃尔沃环球帆船赛中的船型Volvo Ocean 65 作为母型船[6],考虑到设备安装、甲板上浪、倾覆等问题,最终设计了一艘船长1.5 m,吃水0.09 m的小型帆船,主要参数见表3,实物如图3 所示。

图3 案例帆船实物图
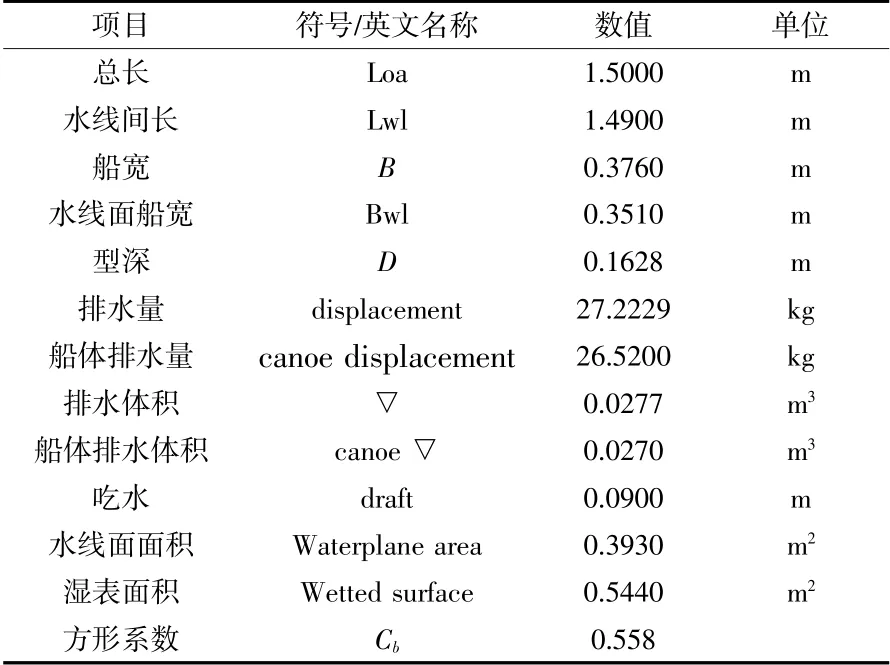
表3 案例帆船船体主要参数[6]
2.2 PMM 试验内容设计
(1)阻力试验与带横倾角的阻力试验
阻力试验是PMM 试验中最重要的试验,对预测船舶速度非常有效。使用正浮阻力试验结果来辨识Xu,Xuu这2 个仅与阻力有关的水动力导数;使用带横倾角的阻力试验来辨识这3 个仅与横倾状态有关的水动力导数。
设计阻力试验工况见表4、表5。

表4 正浮阻力试验工况

表5 横倾5°阻力试验工况
(2)斜拖试验与带横倾角的斜拖试验
通过正浮状态的斜拖试验可以辨识只与横荡速度v有关的水动力导数;通过横倾状态的斜拖试验可以辨识与横荡速度v和φ横倾角都相关的耦合水动力导数。
设计斜拖试验工况见表6、表7。

表6 正浮斜拖试验工况

表7 横倾5°斜拖试验工况
(3)纯艏摇试验
带漂角的艏摇试验与带横倾角的艏摇试验纯艏摇试验,即正浮状态,漂角为0 的艏摇试验。通过纯艏摇实验可以辨识仅与艏摇角速度有关的水动力导数。带漂角的艏摇试验是在纯艏摇试验的基础上,叠加一个固定漂角,使得船舶在随船坐标系中保持一个稳定的横荡速度,可以辨识与横荡速度和艏摇角速度都有关的耦合水动力导数。
带横倾角的艏摇试验是在纯艏摇试验的基础上,叠加一个固定横倾角,使得船舶在艏摇运动的同时保持一个稳定的横倾状态,可以辨识与横倾状态和艏摇角速度都有关的耦合水动力导数。
设计艏摇试验工况见表8、表9、表10。

表8 纯艏摇试验工况

表9 10°漂角的艏摇试验工况

表10 5°横倾角的艏摇试验工况
3 岭回归辨识理论
3.1 岭回归方法
岭回归,又称脊回归、吉洪诺夫正则化,是一种专用于共线性数据分析的有偏估计回归方法,实质上是一种改良的最小二乘估计法,通过放弃最小二乘法的无偏性,以损失部分信息、降低精度为代价获得回归系数更为符合实际、更可靠的回归方法,对病态数据的拟合要强于最小二乘法[11]。
3.2 PMM 试验岭回归理论模型
对于帆船PMM 试验,试验中的需要测量的自变量和因变量模型:

令H= [u,v,r,φ,…,
令C= [Xu,0,…;0,Yv,…;0,Nv,…]代表待求水动力系数矩阵。
则将式(2)转化成矩阵形式如下:

岭回归定义损失函数如下[12]:

其中,Γ =αI,α为岭回归系数。

由C(α)= (HTH+αI)-1HTF可知,C是α的函数,当α∊[0,+∞]时,C~α曲线被称为岭曲线,当岭曲线最终趋于稳定状态,其对应的常值即为待求C。
4 水动力导数辨识与PMM 试验仿真结果
通过岭回归模型,从原始试验数据中辨识出水动力导数后,代入操纵性方程中,即可得到帆船操纵性数学模型。基于操纵性数学模型,模拟PMM 试验的工况,可以得到对应PMM 试验的数值仿真结果,通过原始试验数据与数值仿真结果的对比,可直观判断岭回归辨识结果的准确性。
4.1 阻力试验与带横倾角的阻力试验
表11 为阻力试验水动力导数系统辨识结果,由图4、图5、图6 的阻力试验原始数据与系统辨识结果可知,正浮状态与5°横倾角状态相比,X方向的阻力几乎没有变化;Y,N方向水动力均受到了横倾的影响,但在试验测试速度范围内,影响较小。

表11 阻力试验系统辨识结果

图4 阻力试验原始数据与系统辨识结果

图5 横倾阻力试验FX 原始数据与系统辨识结果
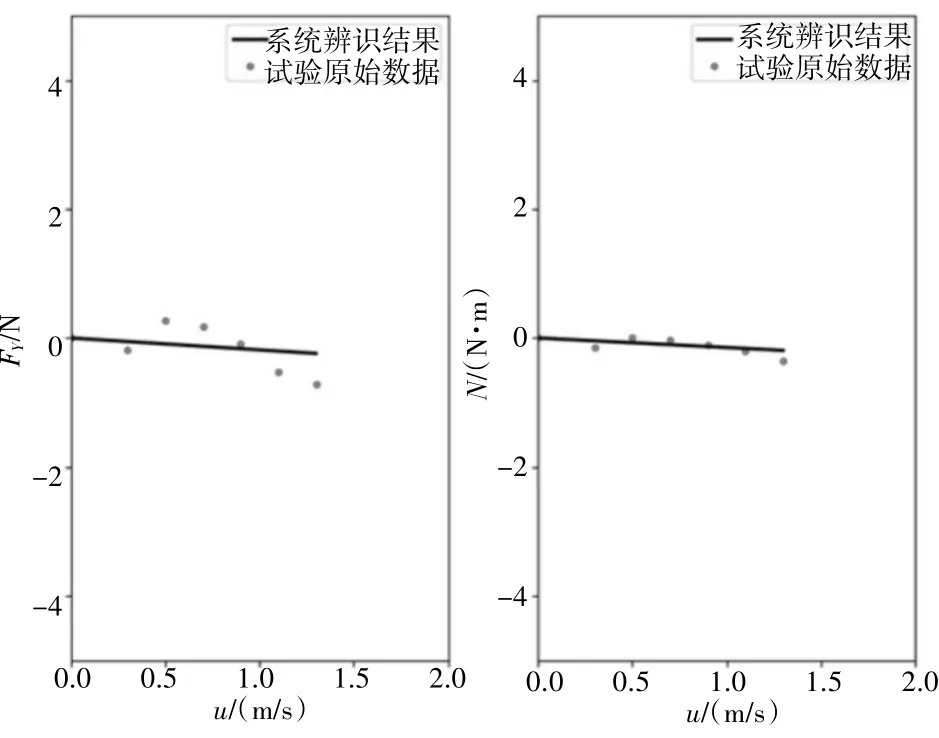
图6 横倾阻力试验FY 原始数据与系统辨识结果
4.2 斜拖试验与带横倾角的斜拖试验
斜拖试验水动力导数系统辨识结果见表12。由图7、图8 斜拖试验原始数据与仿真结果可知,正浮状态与5°横倾角状态相比,横倾状态下的Y,N方向水动力不再关于原点对称,产生了明显偏移。

表12 斜拖试验系统辨识结果

图7 斜拖试验FY,N 原始数据与系统辨识结果
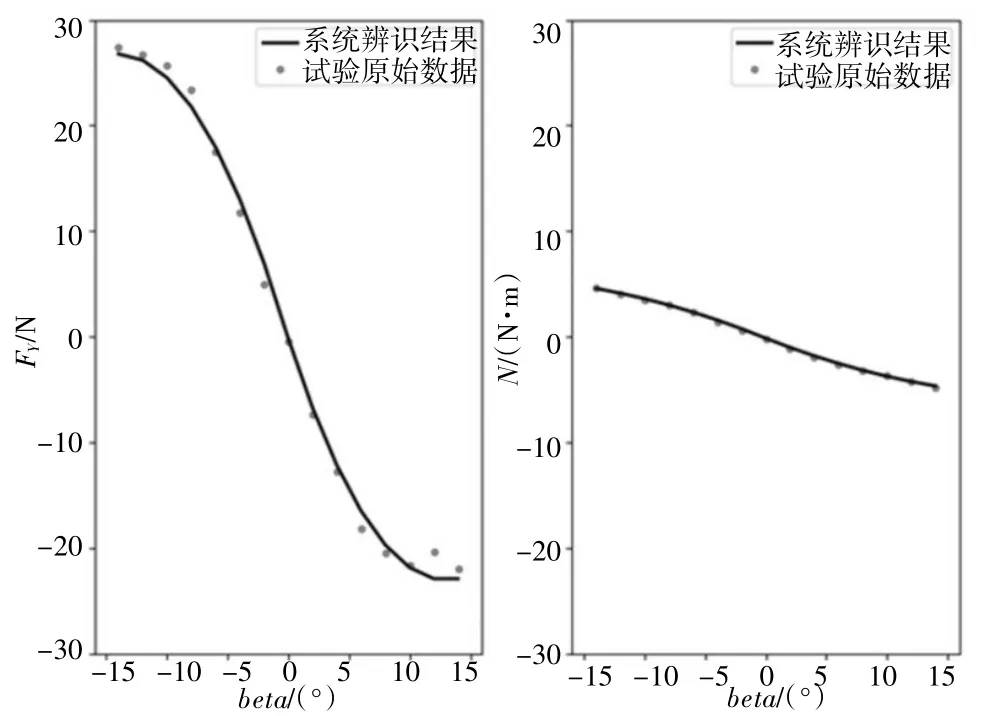
图8 带横倾角的斜拖试验FY,N 原始数据与系统辨识结果
4.3 纯艏摇试验,带漂角的艏摇试验与带横倾角的艏摇试验
艏摇试验水动力导数系统辨识结果见表13。从图9、图10、图11 的原始数据和仿真结果对比可知,仿真结果与试验数据吻合良好;纯艏摇试验水动力呈现良好的正弦波形变化,带横倾角的艏摇试验水动力呈现较为良好的正弦波形变化,存在小幅波动,带漂角的艏摇试验水动力整体呈现正弦波形变化,但带有明显波动。
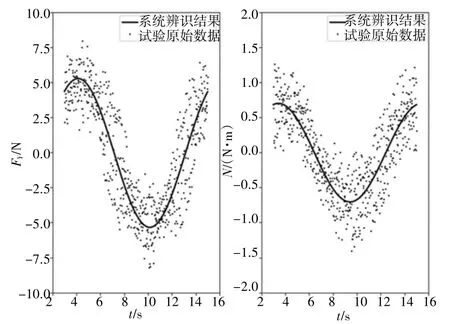
图11 振幅0.4m 带横倾角的艏摇试验FY,N原始数据与系统辨识结果

表13 艏摇试验系统辨识结果

图9 振幅0.4m 纯艏摇试验FY,N 原始数据与系统辨识结果
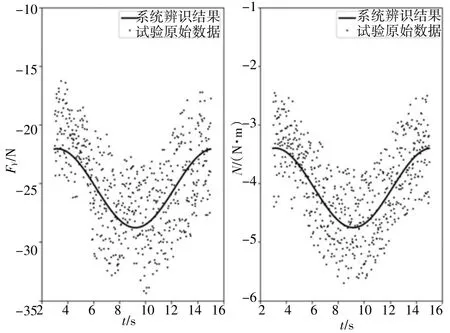
图10 振幅0.4m 带漂角的艏摇试验FY,N原始数据与系统辨识结果
5 操纵性模型辨识结果分析
5.1 试验结果与仿真结果对比分析
由试验与仿真结果对比图可以直观看出,仿真结果与PMM 试验结果吻合良好,证明了本研究建立并辨识得到的操纵性模型的准确性,也证明了辨识方法的可行性。阻力试验X方向仿真阻力与试验阻力基本一致,Y,N方向存在一定差别,Y,N方向差别的原因可能是数值较小导致测量误差相对影响较大;斜拖试验仿真结果与试验数据点基本一致;艏摇试验仿真结果基本位于试验数据点波动的中心线上,与试验数据吻合良好。
5.2 一阶水动力导数横向对比
分离式操纵性模型根据研究重点和研究对象的不同会有不同的形式,但是一阶水动力导数对分离式模型的准确性有着决定性的影响,很多分离式模型都会保留固定形式的一阶水动力导数(如。因此,以这4 个一阶无因次化水动力导数作为对比内容,比较本研究无人帆船系统辨识结果与其他帆船试验结果、常规船型试验结果的异同。
表14 中,参考文献[6]的结果是帆船试验结果,参考文献[3,4]的结果是常规船型试验结果。可以明显看出,本研究的结果与参考文献[6]的一阶水动力导数结果相当接近,证明岭回归辨识是构建水动力模型的有效且准确的方法。参考文献[3-4]的研究对象是大型散货船或油船的系列船型,其试验结果总体上与本研究的系统辨识结果量级相同,但本研究的结果明显小于文献[3-4]的结果,这可能是因为帆船相比于常规船型转艏更加频繁、转艏幅度更大、转艏速度更快,导致帆船转艏运动与常规船型有较大差异。

表14 一阶无因次水动力导数对比
6 结束语
本研究建立了符合帆船运动特征的三自由度分离式水动力模型,设计执行了完整的PMM 试验,使用岭回归辨识方法从PMM 试验数据中辨识得到操纵性模型中全部水动力导数。基于辨识后完成的操纵性数学模型模拟了PMM 试验的工况,得到了与原始实验数据吻合良好的仿真结果,并从仿真与试验对比和一阶水动力导数横向两个角度分析了辨识结果,证明了本研究建立的操纵性数学模型的准确性和岭回归辨识方法的可行性,对帆船操纵性数学模型构建有一定借鉴意义。
