基于改进RGHS和Canny算子的水下图像边缘检测方法*
2021-04-23王慧芳陈远明彭荣发洪晓斌
王慧芳 陈远明 彭荣发 洪晓斌
开发设计
基于改进RGHS和Canny算子的水下图像边缘检测方法*
王慧芳1陈远明2彭荣发1洪晓斌1
(1.华南理工大学机械与汽车工程学院,广东 广州 510640 2.华南理工大学土木与交通学院,广东 广州 510640)
无人船航行过程中容易遇到漂浮物、礁石、冰山等障碍物,需获取障碍物水上、水下的完整轮廓图像,以进行有效避障。由于水下环境和水对光波的折射、反射、吸收等原因,直接对相机获取的障碍物水下图像进行边缘探测难以达到理想效果。为此,首先,采用相对全局直方图拉伸方法实现障碍物水下图像的去雾处理,获取障碍物水下图像色彩恢复后的图像信息;然后,利用改进Canny算子的边缘检测算法进行障碍物水下图像外轮廓和内轮廓检测;最后,根据图像中水平面的成像特征进行拟合寻找水平线,去除倒影。实验结果表明:该方法能够有效获得完整的障碍物水下图像轮廓。
无人船;RGHS;倒影检测;Canny算子
0 引言
无人船具有高度综合感知能力,能够在复杂未知的水体环境下执行任务,在海域巡察、水质监控和水下结构检测等领域应用广泛。无人船作业环境复杂,完备的避障能力不仅是安全航行的保障,也是执行任务的前提[1]。无人船航行时不仅会遇到水上障碍物,还会遇到水下障碍物,如冰山、暗礁等。近年来,水上障碍物识别避让是无人船研究的热点问题[2]。但水下障碍物或障碍物水下部分的避障识别,有待进一步研究。
障碍物水下轮廓检测主要涉及水下图像增强(又称水下图像色彩恢复)和图像边缘检测2方面。但由于水下环境、水的浑浊度及水对光的吸收、散射和反射[3]等原因,水下图像比水上图像更加复杂[4]。目前,水下图像增强的方法主要分为2类:一类是基于物理方法,如Zhao等[5]结合水下图像的背景色和水的固有光学性质,通过光在水介质中传播的基本物理原理来增强水下图像;另一类是基于图像方法,如Chani等[6]提出基于波长补偿的算法,可补偿光沿传播路径的衰减以及可能存在的人工光源影响,能够有效提高水下图像的色彩平衡,但需要消耗大量计算资源和较长计算时间。
目前,图像边缘检测在文件、照片和文物等碎片重构方面应用较多,如JUSTINO E提出一种对调查取证中手撕文件进行重建的方法[7],利用多边形逼近的方法建立多边形模型,通过多边形特征提取进行局部重建,降低了整体复杂度;ZHU L提出局部曲线匹配方法,解决了因全局重建需减少局部曲线匹配而产生的模糊性问题[8]。
障碍物水上图像易于进行轮廓检测,并做出相应的避障决策;但障碍物水下图像由于光线暗、模糊度高等原因难以直接进行轮廓检测,从而影响无人船避障效果。为此,本文提出一种基于改进全局直方图拉伸(relative global histogram stretching, RGHS)和Canny算子的水下图像边缘检测方法。首先,对障碍物水下图像进行基于改进RGHS的水下图像增强;然后,运用基于Canny算子的边缘探测方法进行轮廓探测;最终,获取障碍物水下图像的完整轮廓。
1 障碍物水下图像边缘检测方法框架
根据障碍物水下图像边缘检测要求,搭建障碍物水下图像边缘检测系统,主要包括光学成像、图像色彩恢复、轮廓检测、信息输出和信息融合等模块,方法框架如图1所示。
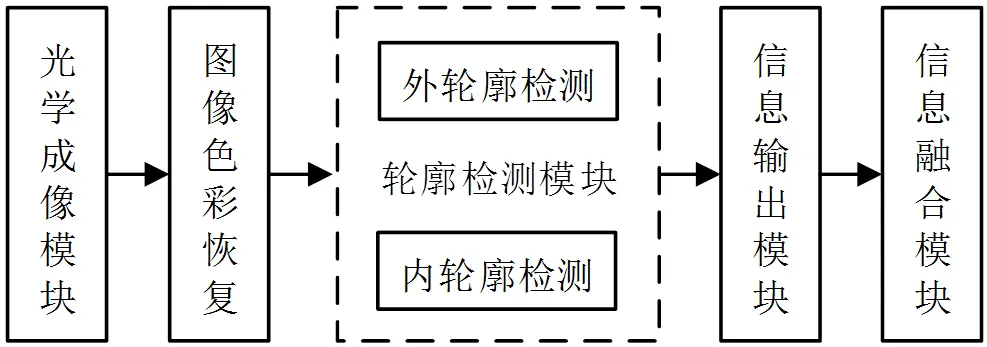
图1 无人船障碍物水下图像边缘检测方法框图
在光学成像模块中,水下相机型号为UW-70,安装在无人船船底中部位置。在环境光线昏暗状况下,该相机可转为红外摄像模式。
在图像色彩恢复模块中,先将障碍物从相机获取的图像内识别出来;再进行水下图像色彩恢复处理,还原障碍物原本色彩,以便更好地进行轮廓检测。
轮廓检测模块分为外轮廓检测和内轮廓检测2部分。其中外轮廓检测主要检测水下障碍物的大致轮廓,为无人船避障提供主要参考;内轮廓检测则寻找障碍物更加丰富的边缘特征,为无人船避障提供必要的细节参考。
信息输出模块将检测出的障碍物水下图像轮廓发送到信息融合模块。
信息融合模块将障碍物水下轮廓信息与障碍物水上轮廓进行融合,获取障碍物的完整轮廓。
2 障碍物水下图像色彩恢复
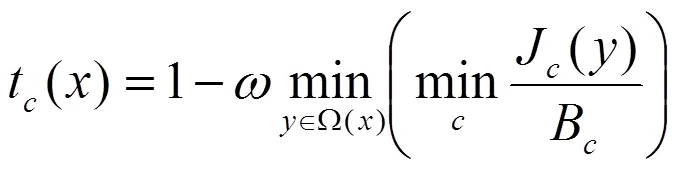
本文采用一种改进的RGHS方法对障碍物水下图像进行恢复增强。水下图像色彩恢复类似图像去雾,其中比较常见是暗通道模型[9]:

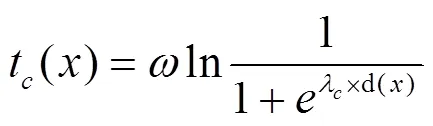
水介质与气介质有本质的区别,本文对此模型进行改进:
一般情况下,水下图像色彩暗淡单调,远不如自然图像色彩丰富,其直方图分布特征不明显。为改善图像色彩分布,一般采用线性拉伸函数:
这种直方图拉伸通常对所有的R,G,B通道使用相同的参数,忽略不同通道的直方图分布特性的差别。尤其是水下图像,R,G,B三个通道的直方图分布特征有十分明显的差别。为此,本文改进一种能够自动调整参数的RGHS方法:
GW(Gray-World)算法假设一个自然图像是色彩丰富且柔和的,R,G,B三个通道的像素值归一化后的平均值应该趋于一致,且都应该接近于0.5,即



大部分检测研究表明[3]:图像各通道上的像素值直方图形成的曲线服从瑞利分布:
式中是分布的控制参数。
通过基于改进的RGHS水下图像增强方法,既考虑了原始图像不同通道像素直方图分布特征,也考虑了不同光波在水下的投射特性,能够针对性地补偿水下图像相较自然图像的损失,同时保留边缘特性,为下一步边缘检测奠定良好基础。
3 障碍物水下图像边缘检测
障碍物水下图像经过基于改进的RGHS方法处理后,可直接采用基于Canny算子的边缘探测方法进行轮廓检测。实验中,对障碍物水下图像外轮廓的检测相对容易,但对障碍物水下图像表面轮廓(下称内轮廓)的检测需要额外的方法处理。障碍物在水面下方形成倒影,影响对障碍物轮廓的检测。因此,障碍物水下图像的边缘探测方法分为外轮廓检测、内轮廓检测和倒影去除3部分。
3.1 外轮廓检测
传统Canny算子存在图像噪声处理能力弱及图像梯度计算时对噪声敏感,容易丢失重要信息甚至检测出虚假边缘等问题。为此,本文提出基于改进的Canny算子算法。
采用基于改进的Canny算子算法进行外轮廓检测。Canny算子具有边缘判断的失误率低、边缘位置检测准确度高和边缘唯一响应等特点。
1)采用高斯滤波和中值滤波混合平滑
高斯滤波对随机噪声具有较好的平滑效果,并且能够充分保留图像边缘。本文采用高斯滤波对水下图像去除随机噪音。大小为(2+1)×(2+1)的高斯滤波器核的生成方程式为

对于水下图像的椒盐噪声,结合中值滤波做图像平滑处理。中值滤波工作原理为

2)用Laplace算子修正Sobel算子
Sobel算子采用2个方向的卷积核求解像素点的梯度值,目前常用的2个方向sobel算子卷积核为
将2个方向卷积作用于像素值后进行合并:
Sobel算子计算简单、速度快,但无法适应复杂纹理的处理。为此,本文引进了Laplace算子:
可得像素点的梯度值为
3.2 内轮廓检测
由于水的遮盖,水下障碍物采用基于Canny算子的改进算法无法探测到图像纹理细节,因此需对图像内部做二值化处理,再进行边缘探测,检测障碍物内部轮廓。具体流程如图2所示。

图2 内轮廓检测流程图
3.3 倒影去除
为减小图像切割对障碍物边缘探测的影响,本文在障碍物整体轮廓检测完成后进行倒影去除。一方面能够保留更多可用细节;另一方面对轮廓图像的操作也更加简单。去除障碍物在水面下形成倒影的流程如图3所示。
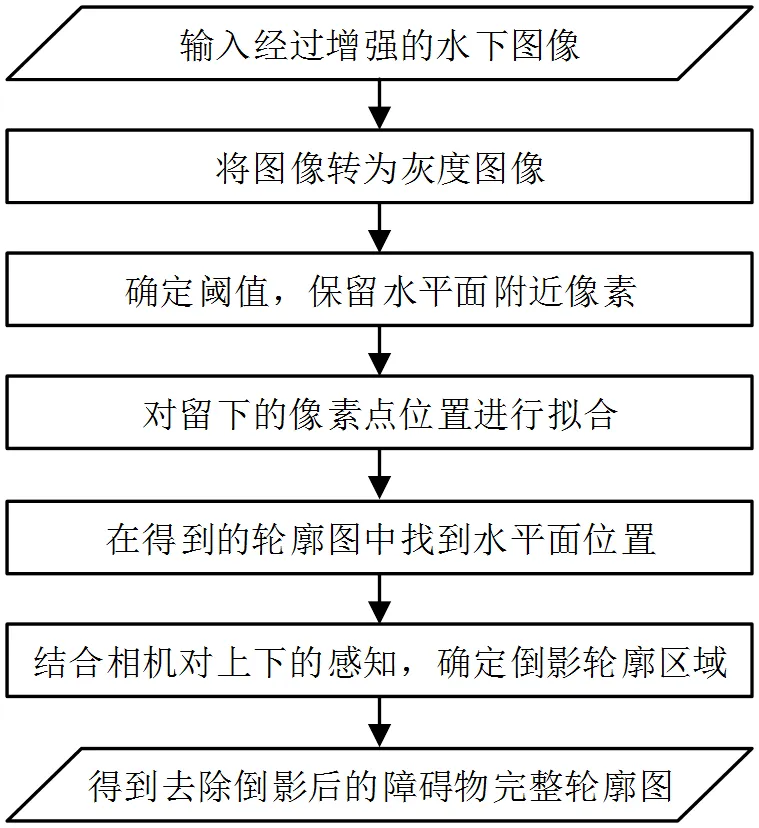
图3 倒影去除流程图
通过实验观察:障碍物在水面下形成的倒影与障碍物实物图像之间总有一条亮度比较高的直线,该直线所在位置即为障碍物视觉图像与水平面的交线所在位置,因而可通过该直线确定水平面位置;再结合相机对上下方向的感知,能够正确判断障碍物轮廓所在位置,准确删除倒影轮廓。其中,确定阈值保留水面附近像素时,阈值为255×90%效果较好。对像素点进行拟合的步骤中,本文采用最小二乘法。
4 实验结果分析
水下相机将图像传输到图像色彩恢复模块后,采用基于改进的RGHS图像色彩恢复方法进行色彩恢复,如图4所示。显而易见,图4(b)在色彩丰富度、饱和度和对比度上都超过图4(a)。
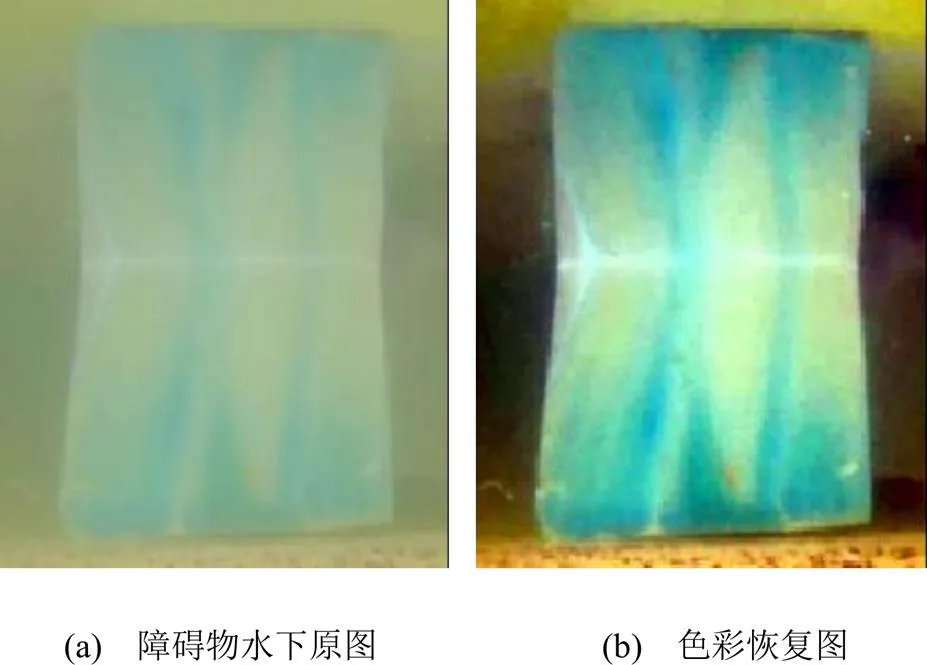
图4 障碍物水下图像处理前后对比
原图与色彩恢复后的直方图如图5所示。可以看出:色彩恢复后的图像直方图特征分布更加明显,易于进行边缘轮廓探测。
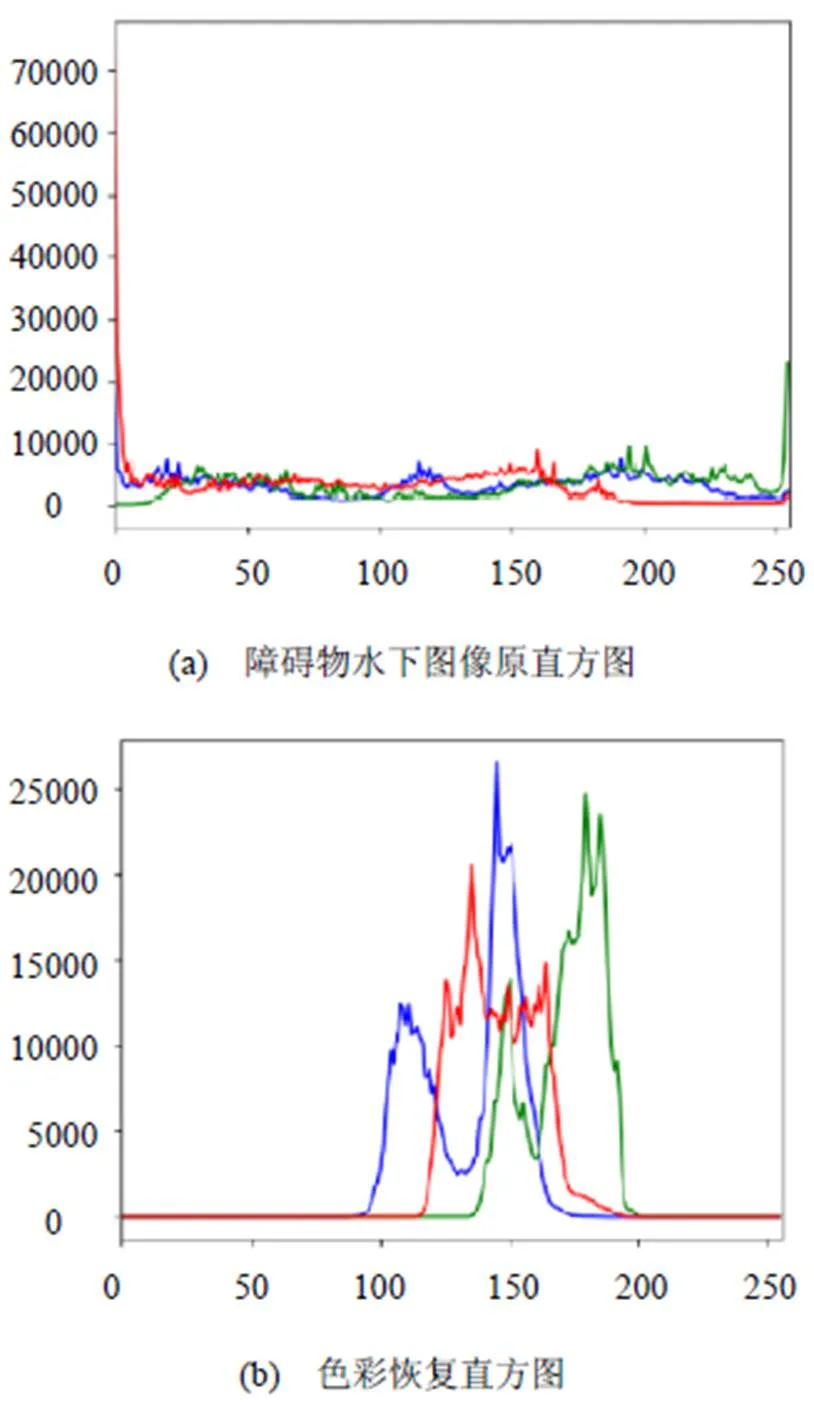
图5 障碍物水下图像直方图处理前后对比
采用基于Canny算子改进的外轮廓检测方法对增强过后的障碍物水下图像进行处理,结果如图6所示。
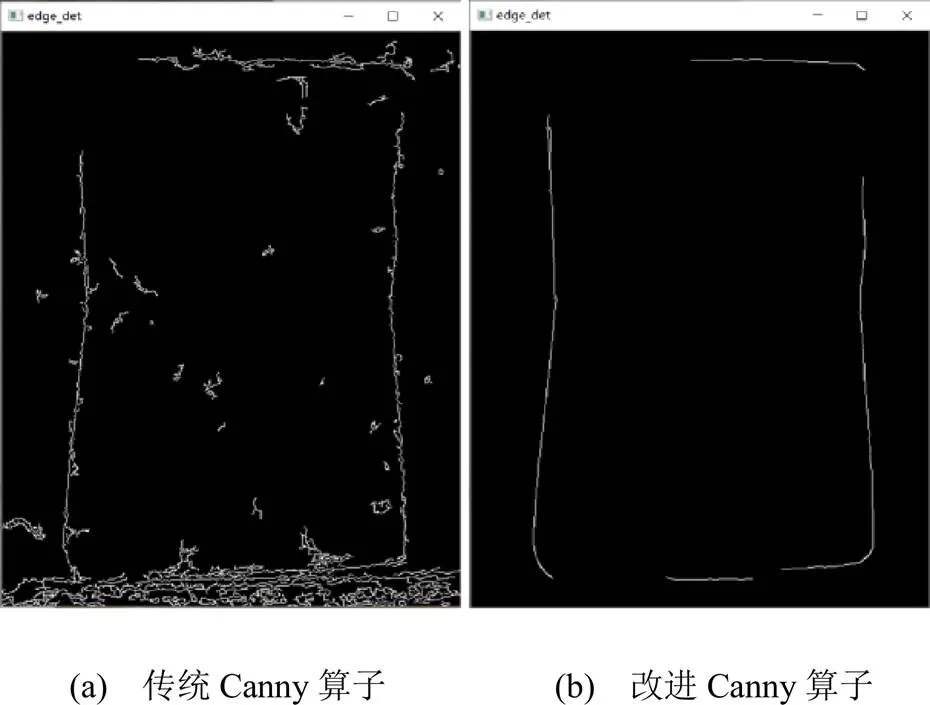
图6 Canny算子改进前后结果对比
由图6可以看出:本文算法能够更好地去除噪音,检测的轮廓更加清晰简洁。
直接对整体图像进行边缘探测,可较为完整地检测外部轮廓,即障碍物整体大小轮廓,但对障碍物表面的细节特征检测乏力。通过本文提出的内部轮廓检测方法,可以检测到障碍物表面细节,如图7所示。
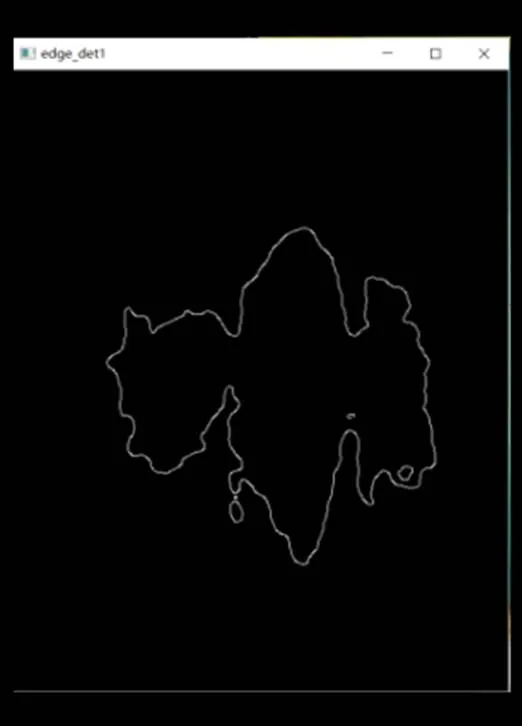
图7 内轮廓检测结果
本文通过水平面附近像素的拟合,寻找出的水平面如图8所示。
最终得到障碍物水下图像的整体轮廓如图9所示。
由图9可知:障碍物水下图像的轮廓包括障碍物的外部轮廓和内部轮廓都比较清晰,障碍物水下部分的倒影也得到有效去除。
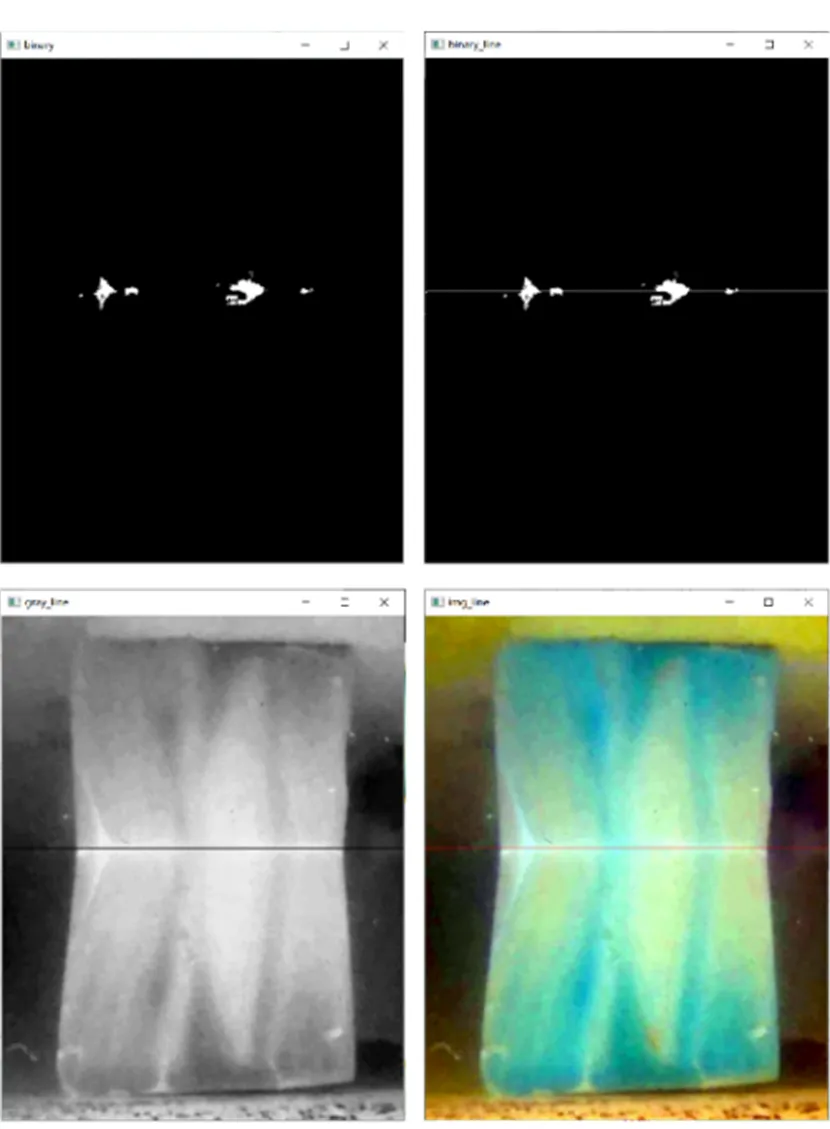
图8 水平线拟合

图9 障碍物水下图像边缘检测结果
5 结语
本文根据障碍物水下图像的特征,先进行水下图像增强;再进行轮廓检测;最后进行倒影去除。在水下图像增强中,提出基于全局直方图的改进算法,使得图像色彩丰富清晰;在轮廓检测中,分别进行外轮廓检测和内轮廓检测,能够提取障碍物更多边缘特征;在倒影去除中,采用直线拟合方法寻找水平面来去除倒影。实验表明:本文采用的方法在障碍物水下图像边缘探测方面取得较好效果。下一步工作将探索障碍物水上、水下2部分图像的整体轮廓检测,进一步解决无人船航行中对各类水上水下障碍物避让的关键问题。
[1] 王成才,商志刚,何宇帆,等.无人船信息融合与避障关键技术综述[J].中国电子科学研究院学报,2019,14(12):1228-1232.
[2] 耿以才,黄立新,陈凌珊,等.无人船安全目标追踪与自动避障算法[J].计算机测量与控制,2015,23(7):2467-2469,2474.
[3] ZANEVELD J R, PEGAU W. Robust underwater visibility parameter[J]. Optics Express, 2003,11(23): 2997-3009.
[4] Huang Dongmei, Wang Yan, Song Wei, et al. Shallow-water image enhancement using relative global histogram stretching based on adaptive parameter acquisition[J]. International conference on multimedia modeling, Springer Cham, 2018,10704:453-465.
[5] Zhao Xinwei, Tao Jin, Song Qu. Deriving inherent optical properties from background color and underwater image enhancement[J]. Ocean Engineering, 2015,94:163-172.
[6] Ahmad Shahrizan Abdul Ghani, Nor Ashidi Mat Isa. Underwater image quality enhancement through integrated color model with Rayleigh distribution[J]. Applied Soft Computing,2015, 27: 219-230.
[7] JUSTINO E, OLIVEIRA L S, FREITAS C. Reconstructing shredded documents through feature matching[J]. Forensic Science International, 2006, 160(2-3):140-147.
[8] Zhu L, Zhou Z, Zhang J, et al. A partial curve matching method for automatic reassembly of 2D fragments[J]. Lecture Notes in Control & Information Sciences, 2006,345: 645-650.
[9] He Kaiming, Jian Sun, Xiaoou Tang. Single image haze removal using dark channel prior[C]. IEEE transactions on pattern analysis and machine intelligence ,2010,33(12): 1956-1963.
Underwater Image Edge Detection Method Based on Improved RGHS and Canny Operator
Wang Huifang1Chen Yuanmin2Peng Rongfa1Hong Xiaobin1
(1.School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China 2.School of Civil Engineering and Transportation, South China University of Technology, Guangzhou 510640, China)
In the course of navigation, unmanned ship is prone to encounter obstacles such as floating objects, reefs, icebergs, etc. the complete contour images of obstacles above and below water are needed to avoid obstacles effectively. However, because of underwater environment and refraction, reflection and absorption of light waves, it is difficult to detect the underwater image of obstacles directly. Therefore, the relative global histogram stretching method is used to remove fog from underwater image of obstacles to obtain the image information after the color recovery of the underwater image of obstacles. Then, the edge detection algorithm of improved Canny operator is used to detect the outer contour and inner contour of underwater image of obstacles; finally, the image is fitted to find water according to the imaging characteristics of the horizontal plane in the image Flat line, remove reflection. The experiment shows that the method can obtain the complete underwater image contour of obstacles effectively.
unmanned surface ship; RGHS; reflection detection; Canny operator
TN212
A
1674-2605(2021)02-0005-06
10.3969/j.issn.1674-2605.2021.02.005
广东省科技计划项目(2019B151502057)
王慧芳,女,1993年生,硕士,主要研究方向:无人船航行障碍物视觉图像融合。E-mail: 1697572027@qq.com
陈远明,男,1979年生,博士,讲师,主要研究方向:无人船设计与验证技术。E-mail: cym@scut.edu.cn
彭荣发,男,1999年生,硕士,主要研究方向:无人船目标检测。E-mail: 1437861283@qq.com
洪晓斌,男,1979年生,博士,教授、博导,主要研究方向:基于人工智能的无人化测控技术及应用、无损检测技术与装备。E-mail: mexbhong@scut.edu.cn