Set-Membership Filtering Subject to Impulsive Measurement Outliers: A Recursive Algorithm
2021-04-22LeiZouZidongWangFellowIEEEHangGengandXiaohuiLiu
Lei Zou, Zidong Wang, Fellow, IEEE, Hang Geng, and Xiaohui Liu
Abstract—This paper is concerned with the set-membership filtering problem for a class of linear time-varying systems with norm-bounded noises and impulsive measurement outliers. A new representation is proposed to model the measurement outlier by an impulsive signal whose minimum interval length (i.e., the minimum duration between two adjacent impulsive signals) and minimum norm (i.e., the minimum of the norms of all impulsive signals) are larger than certain thresholds that are adjustable according to engineering practice. In order to guarantee satisfactory filtering performance, a so-called parameter-dependent set-membership filter is put forward that is capable of generating a time-varying ellipsoidal region containing the true system state.First, a novel outlier detection strategy is developed, based on a dedicatedly constructed input-output model, to examine whether the received measurement is corrupted by an outlier. Then,through the outcome of the outlier detection, the gain matrix of the desired filter and the corresponding ellipsoidal region are calculated by solving two recursive difference equations.Furthermore, the ultimate boundedness issue on the time-varying ellipsoidal region is thoroughly investigated. Finally, a simulation example is provided to demonstrate the effectiveness of our proposed parameter-dependent set-membership filtering strategy.
I. INTRODUCTION
THE past few decades have witnessed a surge of research interest in a filtering problem that serves as a core topic in control and signal processing communities [1]–[14]. So far, a variety of filtering techniques have been developed and further applied in many practical areas such as system guidance and navigation, target tracking, process control, and fault detection. In general, the extensively studied filtering strategies can be divided into five categories, namely,minimum mean-squared error filtering (e.g., the well-known Kalman filtering and extended Kalman filtering) [15]–[17],H∞filtering [18], [19], ultimately bounded filtering [20], [21],moving-horizon estimation [22]–[24], and set-membership filtering (or set-valued filtering) algorithms [25], [26]. For instance, in [27], a distributed resilient filter has been proposed for power systems under denial-of-service attacks.The recursive filtering problem has been studied in [28] for time-delayed nonlinear stochastic systems with missing measurements, uniform quantization and Round-Robin protocol scheduling. In [29], a distributed H∞-consensus filter has been designed for discrete time-varying systems subject to multiplicative noises and censored measurements over sensor networks. Among others, the set-membership filtering (SMF)scheme is particularly suitable for time-varying systems with unknown-but-bounded noises.
The original idea of SMF dates back to 1968 in [30] where a confidence region containing the true system state (rather than a concrete state estimate) is generated at each time instant.Compared with the pointwise filters (e.g., the minimum meansquared-error filter, H∞filter and moving-horizon estimator),the set-membership filter utilizes the interval-based techniques. So far, the SMF problem has gained an ongoing research interest for various systems, e.g., [31]–[35] and the references therein. For example, in [33], a so-called probabilityguaranteed set-membership filter has been designed for timevarying systems with incomplete measurements, where the estimation error is contained in an ellipsoidal set with a given probability. The distributed SMF problem has been studied in [31] for linear time-varying systems with dynamic eventtriggered transmission scheme. Among various SMF approaches, the recursive linear matrix inequality (RLMI)algorithm has proven to be popular, with which the filter parameter is recursively computed to confine the filtering error into a time-varying ellipsoidal region in the state-space.The RLMI-based approach is particularly suitable for online applications. Nevertheless, the ultimate boundedness of the time-varying ellipsoidal region remains to be an open yet crucial issue in quantifying the filtering performance. As such,it is of practical importance to develop new SMF techniques with a special focus on analyzing the ultimate boundedness.
Up to now, almost all SMF-related results have been exclusively concerned with bounded disturbances, where the size of the corresponding ellipsoidal region (containing the true system state) is largely dependent on the bounds of the underlying noises, which implies that the filtering performance would deteriorate if the amplitudes of external disturbances are out of a normal range. Note that, in many practical applications, the system measurements might suffer from large-amplitude disturbances, leading to the so-called measurement outliers. Compared with other extensively investigated noises, the measurement outliers have their own characteristics of i) occasional/intermittent/probabilistic occurrences and ii) unexpectedly large amplitudes. Till now,some initial results have been reported in the literature on the filtering problem with outliers, e.g., [36]–[42] and the references therein.
There are generally two frameworks for dealing with the filtering problem subject to outliers, namely, the passive robustness-based framework and the active detection-based framework. In the passive resistance-based framework, the filter is designed by selecting suitable filter parameters based on statistical tests or on-line adaptive adjustment such that the filtering performance is less sensitive to abnormal noises(outliers) in a statistical/saturated sense [38], [40], [43]. For example, in [44], [45], some robust filters have been developed to reduce the sensitivity of the filtering performance to outliers. In [38], a so-called stubborn state observer has been constructed by using the saturated innovation in the observer design, under which the effects induced by the possible outliers would be restrained.Nevertheless, the passive robustness-based schemes cannot guarantee the complete elimination of the effects induced by the measurement outliers in the filtering process. In the active detection-based framework, the filter is designed with dedicatedly proposed structure with hope to cancel the innovations corrupted by outliers. For example, in [37], a novel moving-horizon estimator has been developed to cope with the estimation problem subject to outliers, where a special leave-one-out method has been employed to identify the “ harmful measurements” possibly contaminated by outliers. Unfortunately, to the best of the authors’ knowledge,the SMF problem subject to measurement outliers has not gained adequate research attention yet, despite the critical importance of mitigating the outlier-induced effects. It is,therefore, the main motivation of this paper to fill such a gap.
Summarizing the discussions made thus far, there is a practical need to deal with the SMF problem for time-varying systems with measurement outliers. Some essential difficulties we have to face are identified as follows: 1) How to establish reasonable model for the measurement outlier according to engineering practice; 2) How to distinguish the measurement outputs contaminated by outliers from those normal measurements? 3) How to design the set-membership filter that prevents the filtering performance from being degraded by the measurement outliers? and 4) How to deal with the ultimate boundedness analysis issue on the time-varying ellipsoidal region containing the true system state?
In response to the identified difficulties, the contributions of this paper are highlighted as follows: 1) The measurement outlier is modeled by an impulsive signal with its interval length (i.e., the minimum duration between two adjacent impulsive signals) and minimum norm (i.e., the minimum of the norms of all impulsive signals) determined by engineering practice; 2) The SMF problem is, for the first time,investigated for time-varying systems with measurement outliers where a novel detection method is developed to examine whether the current measurement output is corrupted by an outlier; 3) A dedicatedly designed parameter-dependent set-membership (PDSM) filter is employed to “discard” the measurements corrupted by outliers; and 4) The ultimate boundedness is investigated for the time-varying ellipsoidal region containing the true system state.
The remainder of this paper is organized as follows. In Section II, the time-varying system with impulsive measurement outliers is introduced and the corresponding PDSM filter structure is proposed. In Section III, the detection strategy of the measurement outlier is developed, and the desired timevarying filter gain matrix is calculated by solving two recursive difference equations. Then, the boundedness analysis of the constraint matrices concerning the ellipsoidal region is carried out. A numerical simulation example is given in Section IV to demonstrate the correctness and effectiveness of our proposed PDSM filtering scheme. Finally, we present the conclusion of this work in Section V.

II. PROBLEM FORMULATION AND PRELIMINARIES
A. Impulsive Measurement Outliers
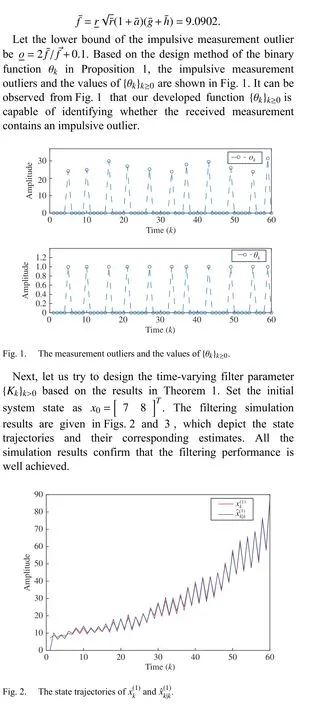
In this work, we consider the case where the measurements of the sensors could be corrupted by certain outliers.
Obviously, an outlier occurs at one of the sampling instants and therefore the number of occurred outliers should be accountable. In this sense, let t(i) (i ∈N+) denote the occurrence moment of the i-th measurement outlier. Based on the sequence {t(i)}i≥0of the occurrence moments, the measurement outlier ok(i.e., the outlier occurring at the sampling instant k) can be modeled by the following form of impulsive signals:







Remark 6: So far, we have studied the SMF problem for linear time-varying systems subject to impulsive measurement outliers. Clearly, the following important factors contribute much to the system complexity: 1) The time-varying system parameters; 2) The noise information (characterized by the matrices R and S); 3) The shortest occurrence period and the smallest amplitude of the impulsive outliers; and 4) The uniform observability condition of the plant. As expected, all these factors are reflected in the main results concerning the outlier detection scheme, filter parameter design, and boundedness analysis of the filtering error.
Remark 7: In this paper, a systematic investigation is initiated on the new yet challenging problem of setmembership filtering for time-varying systems with measurement outliers. The main novelties of this paper are outlined as follows: 1) The established model of the measurement outlier is new that is in accordance with the engineering practice; 2) A new algorithm is proposed to distinguish the measurement outputs contaminated by outliers from those normal measurements; 3) A new set-membership filter is designed to resist the measurement outliers with guaranteed filtering performance; 4) A rigorous analysis is carried out on the ultimate boundedness issue of the timevarying ellipsoidal region containing the true system state; and 5) the developed filter design algorithm is recursive that is suitable for online applications.
IV. AN ILLUSTRATIVE EXAMPLE
A numerical example is provided in this section to illustrate the effectiveness of the proposed filter design scheme.
To make our simulation nontrivial, we consider an unstable linear time-varying system of the form (3) with the following time-varying parameters:

In order to show the correctness of the boundedness analysis results about the constraint matrices, Fig.4 plots the trajectories of the maximum eigenvalues and minimum eigenvalues of {Pk|k}k≥0, respectively.
Next, we would like to give a simulation comparison between our developed PDSM filtering scheme and the normal SMF without the outlier detection. The simulation results are given in Fig.5. It can be easily observed from Fig.5 that our developed PDSM filtering scheme performs much better than the normal SMF.

Fig.3. The state trajectories of and.
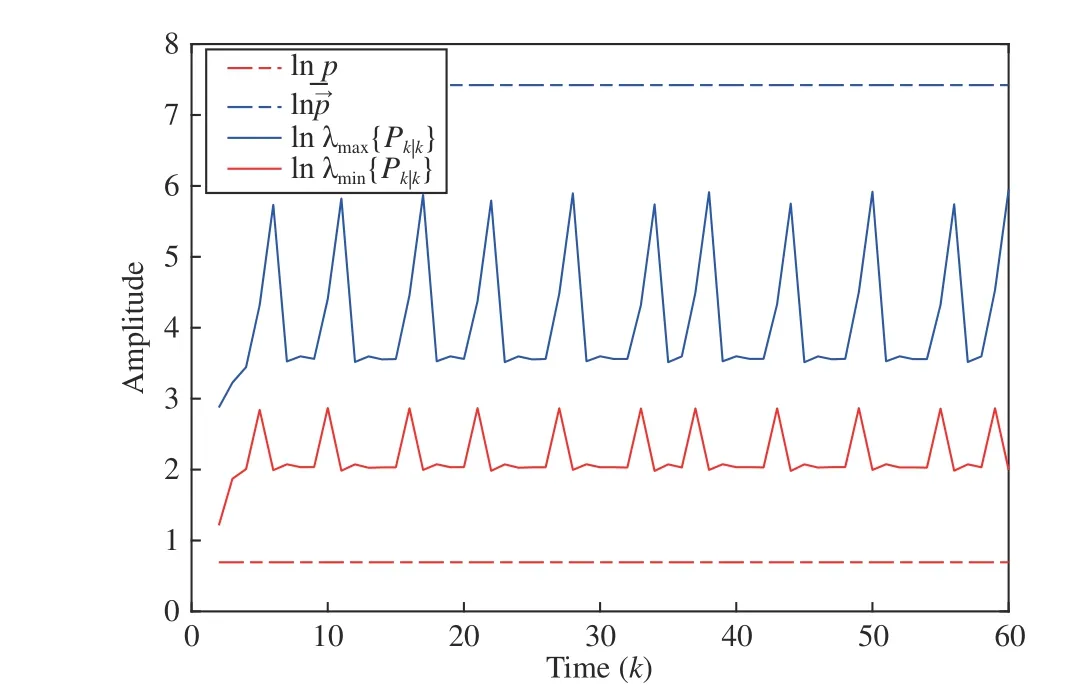
Fig.4. The trajectories of λmax{Pk|k} and λmin{Pk|k}.

Fig.5. The trajectories of ‖ek|k‖ under different filtering approach.
V. CONCLUSION
In this paper, the SMF problem has been studied for a class of linear time-varying systems subject to IMOs, which have been modeled by the additive impulsive signals. The interval lengths of outliers (i.e., the times between each two adjacent outliers) are assumed to be larger than certain threshold.Moreover, different from the bounded additive disturbances,the norm of the impulsive measurement outliers is supposed to be larger than certain known scalar. A special outlier detection approach has been proposed to examine whether the received measurement is corrupted by the impulsive outlier. Based on our provided detection strategy, a PDSM filter has been designed to remove the innovations with outliers. The timevarying filter gain matrix has been derived recursively by solving a class of difference equations. Then, the boundedness analysis issue of the time-varying ellipsoidal region containing the true system state has been studied. Finally, an illustrative example has been provided to demonstrate the effectiveness of our developed PDSM filtering scheme.
Further research topics would include the extension of the main results to 1) the distributed SMF problem for linear systems with IMOs [52], [53], and 2) the PDSM filtering with intermittent measurement outliers [54].
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Physical Safety and Cyber Security Analysis of Multi-Agent Systems:A Survey of Recent Advances
- Joint Algorithm of Message Fragmentation and No-Wait Scheduling for Time-Sensitive Networks
- Multiagent Reinforcement Learning:Rollout and Policy Iteration
- A Survey on Smart Agriculture: Development Modes, Technologies, and Security and Privacy Challenges
- A Survey of Evolutionary Algorithms for Multi-Objective Optimization Problems With Irregular Pareto Fronts
- Dependent Randomization in Parallel Binary Decision Fusion