无人机智能巡检在检测风电光伏故障中的应用研究
2021-04-20陆成龙刘忠德张皖军杨祖球朱继涛
陆成龙,刘忠德,张皖军,杨祖球,朱继涛
(1.国家电投集团江西电力有限公司,江西南昌 330096;2.国家电投集团信息技术有限公司,北京 100080)
在新能源行业发展进程中,我国风力发电以及光伏发电装机容量也迅猛增长,进一步提升了风电光伏的科技水平。随着叶片长度的不断增长,风电机组生命周期的不断延长,容易导致叶片出现损伤和故障,同时,受到叶片结构以及环境复杂性的影响,风电光伏运行维护难度较大[1]。传统人工巡检中,工人劳动强度较大、时间长、成本高、效率低等,无法满足现代风电光伏故障检测需求。为了提升工作效率,降低维护成本,在智能化水平发展中,无人机智能巡检技术随之出现并得到应用。文中对无人机智能巡检在风电叶片损伤等相关故障检测中的应用展开分析,探讨无人机智能巡检的应用价值。
1 无人机智能巡检应用价值
无人机智能巡检在风电光伏故障检测中的应用,有助于显著降低巡检成本。通常风电叶片是在具有丰富风力资源的区域内安装,这些区域一般人迹罕至,人工巡检难度较大。人工巡检本身也需要专业人才以及大量资金的投入,成本高、效率低。无人机巡检对于地形和环境的要求不高,在远程操控下就可以记录目标风电叶片巡检内容,显著降低了人工参与工作量,降低了检测成本,同时也提升了巡检安全性。另外,在无人机智能化科学技术的应用下,构建了完善的无人机智能巡检系统,功能随之完善,进一步提升了无人机工作全面性以及工作效率,也有助于降低叶片故障发生率,为风电光伏系统运行安全性提供了有效保障[2-3]。
2 无人机及其故障识别路线
2.1 无人机
在当前智能巡检中,主要应用六旋翼无人机,其自主巡检系统组成包括有:无人机设别、RTK 精确定位系统、数据采集传感器系统以及集成地面站系统等。实物具体见图1。在应用中,通过RTK 差分精确定位,可以将定位精确度控制在2 cm 范围内;完成巡检拍照任务;连续作业时间可达到35~40 min;可实现数据的高速传输和存储,完成无人机监视以及数据展示功能;执行任务过程中可全自主避障飞行,同时可以将三维航线显示出来;运行稳定,具有较高的安全性[4]。

图1 六旋翼无人机
2.2 无人机故障识别路线
无人机识别风机叶片故障前,先要在人工巡检下确定样本风机,也就是确定存在故障的风机,在无人机应用下实施巡检,以此探讨无人机识别风机叶片故障的应用价值。其中风机叶片故障识别技术路线见图2。
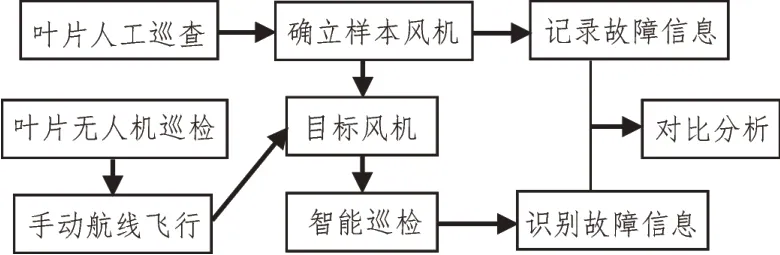
图2 风机叶片故障识别技术路线
2.2.1 确定巡检区域
无人机在针对风电光伏机电叶片实施巡检前,先要全面了解叶片实际工作情况、所处位置等信息,依照具体需求确定相应的巡检方向和内容,其中无人机智能巡检工作内容主要针对叶片主体、工作线路和相关附属设备等[5]。对于叶片的工作情况和异常问题应用无人机高清相机,可以对其实施近距离拍照,完成相关信息的记录和存储,针对叶片中存在的异常情况和损伤位置实施计算分析,工作人员可以结合巡检拍摄的照片及视频确定故障位置及其原因,提出相应的处理维护策略。
2.2.2 巡检流程
在无人机智能巡检中,先要在无人机的应用下排查叶片周围环境及其相关影响因素,审核相关数据,最后,完成无人机系统程序的设置,保证在无人机工作范围内不存在密集树林和高大构筑物,以免影响无人机的正常工作。在针对无人机检测程序实施设计以及优化后,还需要对其相关工作进行调试,确保各项工作均合格后即可确定相应飞行路线以及检测项目,在飞行过程中必须由专业技术人员实施操作和控制,也需要设置相应的飞行警戒线。在完成无人机的起飞准备工作后,可以依照技术人员的指令进行起飞和巡检,在此过程中详细记录无人机的起飞情况。巡检过程中,技术人员依照设定的路线采用遥控器对无人机飞行路线实施控制,一旦出现飞行偏离情况,则可以立即对其实施手动操控,需要有效确保无人机始终在预定线路中飞行[6-8]。飞行速度需要结合当地的地形和环境情况来确定,如果需要对输电线路实施精细化巡检,则可以适当放慢飞行速度,控制在4 m/s 范围内。其中,飞行控制相关伪代码为:
emit sendOneKeyFlyData(data);//将编码后的指令发送至通信链路模块
getInformayionMsg(data[6]);//显示已发送的指令信息,等待回复
if(isOpen){
this->port->write(data);//通过串口将数据发送至无人机
}
//接收回复指令并发送至飞行控制模块
if(a[i+2]==char(0xC4) &&a[i+3]==char(0x02)&&isHandShaked){
int type_1=a[i+4];int type_2=a[i+5];
emit instructReply(type_1,type_2);
}
3 无人机智能巡检系统设计
3.1 硬件设计
无人机智能巡检系统硬件设计中,主要包括两部分,分别为控制模块以及测距模块。该系统设计中选用8 MHz 晶振,设置2 路LED 灯以及1 个SD 卡插槽共3 个串口。在此过程中,LED 灯的作用主要是指示说明,反映无人机工作状态,以便能够及时发现其异常情况等;SD 卡则能够实现对无人机飞行日志的记录[9-13]。以上串口主要是在数据包接收和测量数值中应用,在一路PWM 输出口的接入应用下,可以有效实现对云台拍照过程的控制[14-16]。系统硬件接线方案设计见图3。为进一步减少产品成本,系统设计针对两个模块输出数据实施同一串口处理,在应用过程中必须要和软件配合,才能够有效完成两者测量距离的准确解析以及记录。其中无人机模型智能选件见图4。
3.2 软件设计
结合无人机型号、系列和云台拍照速度等相关情况,在无人机智能巡检系统中的控制模块为STMFI 以及MCU,在运行中具有较快通信速度,可以实现信息的及时传递,在风电叶片巡检过程中能够有效满足实际需求。
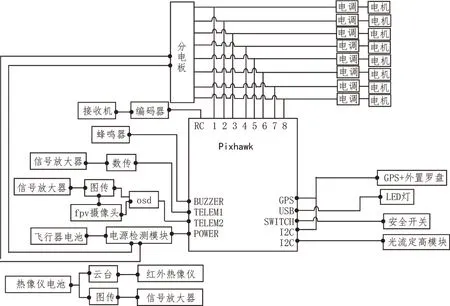
图3 系统硬件接线方案设计

图4 激光模块
无人机智能巡检工作中,在软件系统的应用下可以实现对叶片损伤相关信息的迅速处理,例如可以在软件的应用下,实现对叶片损伤大小和边界所占比例实施计算,同时和超声波以及激光测量距离所得数值结合应用,可以实现对机电叶片实际损伤情况确定和分析,有助于降低计算误差,提升检测结果准确性。实际计算过程中,为提升计算准确性,可以采用超声波和激光测量距离值两者的平均值。其中无人机智能巡检系统的MCU 框架设计见图5。

图5 MCU框图设计
4 无人机智能巡检的应用效果
在无人机智能巡检中,针对样本叶片采用无人机进行检测,无人机运行过程中通过手动控制飞行航线,包括有两个飞行路线分别为背风面顺光飞行以及迎风面逆光飞行。在和叶片距离保持在10 m时对其实施智能识别,发现异常则悬停实施近距离拍照。在实验过程中,无人机的迎风面逆光飞行巡检结果效果不佳,背风面顺光飞行巡检工作顺利完成,巡检结果显示,其中无人机叶片巡检疑似故障见图6,放大后故障信息见图7,从图中能够发现,叶片边缘存在有长裂纹,叶尖处也存在有叶片涂层脱落,存在划痕。无人机巡测结果显示热斑识别存在10处疑似故障。

图6 无人机巡检疑似故障
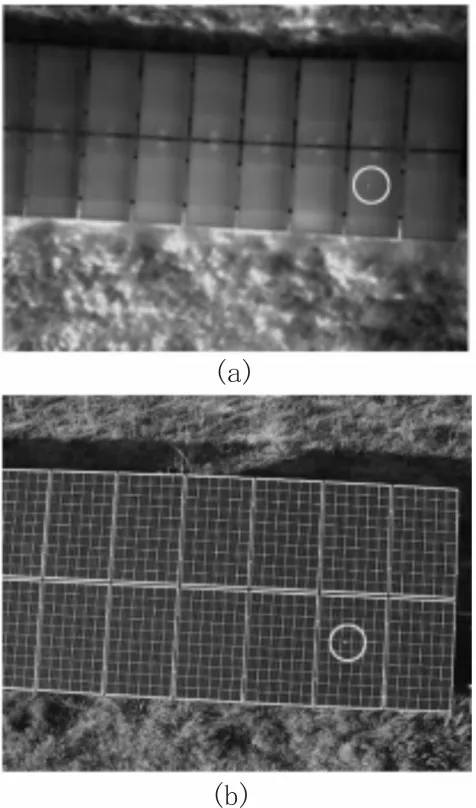
图7 光伏组件热板识别
在以上两种方法巡检中可以发现,无人机智能巡检结果中能够准确发现光伏组件上的异常热斑情况,由此可见,在风电光伏故障诊断中无人机能够准确识别异常热斑,为工作人员针对风电光伏运行维护提供了重要的参考依据。其中光伏电站在长时间运行中,容易出现各种裂纹、损坏等异常问题,也会存在落叶、尘土等覆盖情况,如果一旦对光伏组件造成影响,则会导致存在局部阴影,引发组件内部部分电池单片电流和电压出现改变,即会加大太阳电池组件布局电流和电压之积,提升局部温度。另外,太阳能组件中部分电池单片如果具有缺陷,也会引发组件出现局部温度升高,发生热斑。在热斑效应下,温度持续升高达到极限,则会导致电池组出现焊点熔化,造成栅线损伤,导致出现严重后果。因此,无人机智能巡检在风电光伏故障诊断中的应用,更有助于提升检测准确性,为风电光伏稳定运行提供了有效保障。
5 结束语
通过以上研究得出以下结论:
第一,无人机智能巡检在风电光伏故障诊断中具有重要应用价值,在完成无人机智能巡检系统硬件和软件设计后,可以依照相关的巡检路线实施检测,弥补了高倍望远镜在应用中精细化不足的问题,有助于保障风电光伏的正常稳定运行。
第二,无人机智能巡检和人工巡检结果相比,能够实现对光伏组件异常热斑的有效检测,能够有效防范异常热斑对光伏组件的损伤,为相关工作人员运行维护提供相关参考依据,确保风电光伏的稳定运行,提升运行安全性和可靠性。
第三,无人机在风电光伏故障检测中的应用,操作简单、维护便利,具有较高性价比,同时也能够进一步提升检测结果全面性和准确率,提高工作质量和效率,可以有效满足用户需求,是当前风电光伏故障检测中的一个重要选择。
