系统综合效率优化的插电式混合动力车辆的能量管理策略
2021-04-20童盛稳
童盛稳,陈 韬,谢 辉
(内燃机燃烧学国家重点实验室,天津大学,天津 30007,中国)
插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)可通过外部电网和发动机做功2种方式获取电能[1],实现较长的纯电里程;采用混合动力的方式工作,降低了燃油消耗,避免了里程焦虑[2]。因此,在插电式混合动力系统工作过程中,必然存在能量之间的转换和能量源自身效率变化导致的能量损失。与纯电动汽车和传统混合动力汽车不同,在运行中,PHEV车辆电池中储存的能量来源是变化的,电池储电的等效效率会随着时间改变,并造成实际运行中系统综合效率的动态变化[3]。
插电式混合动力车辆处于发动机充电模式时,电池储电的等效效率受该时刻发动机工作效率影响,因此导致整个系统的综合效率具有动态性和耦合性的特点。PHEV综合能效的变化最终会影响能量管理策略的运行效果。能量管理策略是混合动力系统能量管理的基础和核心。混合动力的能量管理策略能效评价方法主要有以下3类:
第1类,以等效系统油耗作为综合能效评价指标。等效油耗最低策略(equivalent consumption minimization strategies,ECMS)是应用最为广泛的能量管理策略。该方法通过等效因子将电能消耗转换成等效油耗,并将实际燃油消耗和等效油耗之和作为能效评价指标[4-5];但等效因子没有确切的物理意义,因此,用等效因子的方法来实现电能的转化,在PHEV中用无法解决能效的耦合性及动态性的问题。
第2类,以等效功率作为综合能效评价指标。Jinglai WU[6]以最小化系统等效功率为优化能效指标,进行混合动力系统能效优化,考虑了实际转化过程的效率对电能进行转换,有效提升了系统能效。但该方法未考虑电池储电效率的变动,无法很好应对系统综合能效的耦合性问题。
第3类,以系统综合效率作为评价指标。许多研究[7-9]表明:以系统效率作为能效评价指标,对插电式混合动力系统能效提升,有显著效果;现有的研究还未见系统的针对能效的耦合性及动态性进行效率的修正。Xin YE[7]针对并联式HEV,采用效率模型,结合模糊控制的方法,验证了HEV在最佳系统效率下能量分配的有效性,提高了燃油经济性。Wei WANG[8]等人针对功率分流式HEV建立系统效率模型,并以系统效率为优化目标,提高了系统能效,但未能考虑电池效率的时变特性。连静[9]等人针对并联式混合动力系统,构建了不同运行模式下的系统效率评估方程,并基于最高系统效率进行扭矩分配,在一定程度上降低了整车油耗;但并未考虑电池电量来源效率不同引起的效率动态变化。Goekce K[10]等人针对串联式混合动力系统,建立了系统效率成本函数,结合发动机及电机效率等高图,构建瞬时优化算法进行扭矩寻优,能在一定程度上提高系统能效。林歆悠[11]等基于并联PHEV,建立系统效率模型;并采用遗传算法,进行电量保持模式下的能量分配迭代寻优,使整车性能有所提升,但未考虑PHEV电池中充电能量的转化来源引起的效率变化。以上研究虽然采用了多种手段对PHEV系统的能效进行了优化;但是没有很好地解决PHEV系统存在的时变和耦合问题;因而解决该问题面临的主要困难为如何准确估计系统效率。
针对PHEV系统能效的耦合性和时变性,需要对电池储电效率的动态变化进行评估,并根据其变化对系统综合效率进行优化,实现最大程度地真实节能;因而,为了使系统在运行过程中实现能效的动态最优,有必要通过相应的优化算法进行运行模式的选择及动力的优化分配。
本文通过建立发动机、电机、电池效率等关键耗能装置模型。在此基础上,根据功率分流式PHEV不同运行模式下的特点,分别建立不同运行模式下的综合系统效率评价模型;采用基于预设规则和动态优化相结合的复合能量管理策略,以系统综合效率动态最优为目标,在不同模式下对PHEV系统能量的优化分配,以期提高插电式混合动力车辆道路运行能效。
1 研究平台
本文的研究对象是国内某自主品牌的插电式混合动力车辆。该车辆的动力构型为功率分流式插电式混合动力系统,电机1、2为交流永磁电机,其他基本参数如表1所示。
基于GT-SUITE平台搭建功率分流式混合动力整车及动力系统模型,包括:电机模型、行星轮传动模型、电池模型、车辆模型。动力构型如图1所示。整车模型如图2所示,其中未注符号为软件模块名称。
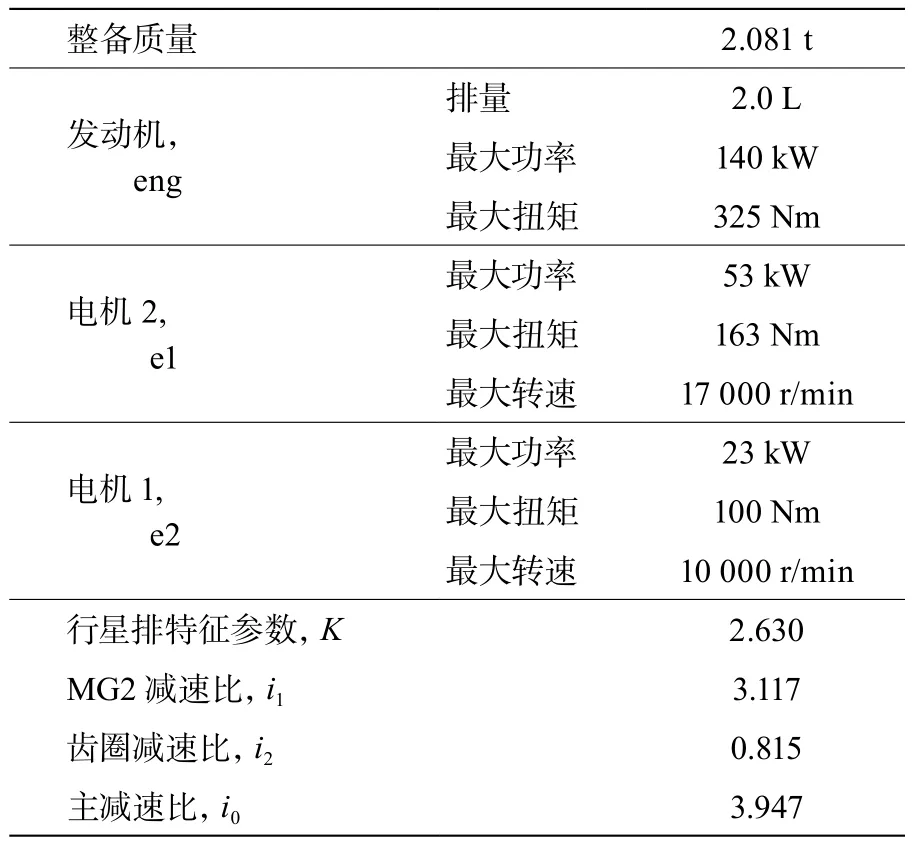
表1 HEV基本参数
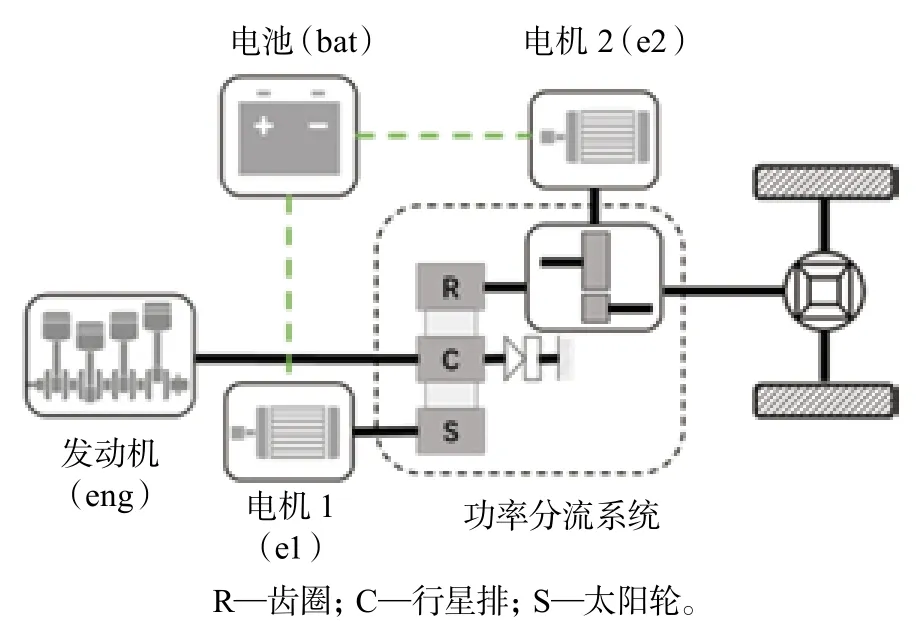
图1 PHEV动力构型图
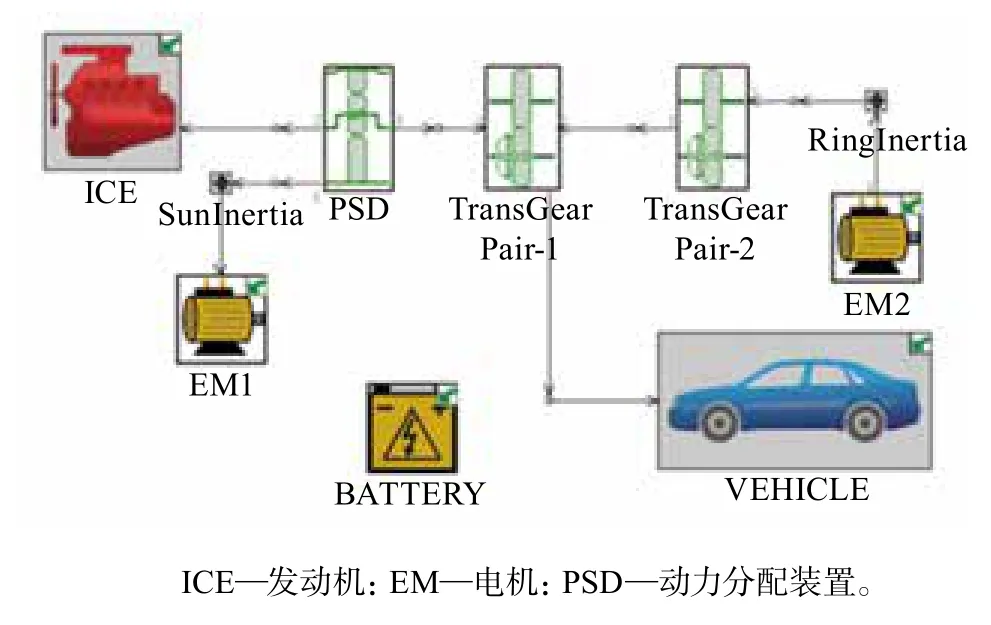
图2 混合动力系统对象模型
1.1 发动机和电机模型的建立
为了为简化计算和缩短计算时间同时有效保证模型精度,假设发动机处于良好的预热状态,建立基于真实实验数据和机理结合的稳态发动机及电机模型。
根据发动机转速(neng)及输出扭矩(Teng),通过查表可得发动机模型实际油耗为

若令Qf为燃油总热量消耗,则发动机效率为
同理,电机模型也选用了基于效率等高图的建模方式。查表可得电机1 (e1)及电机2 (e2)效率为:
发动机、电机1、电机2效率等高图如图3所示。
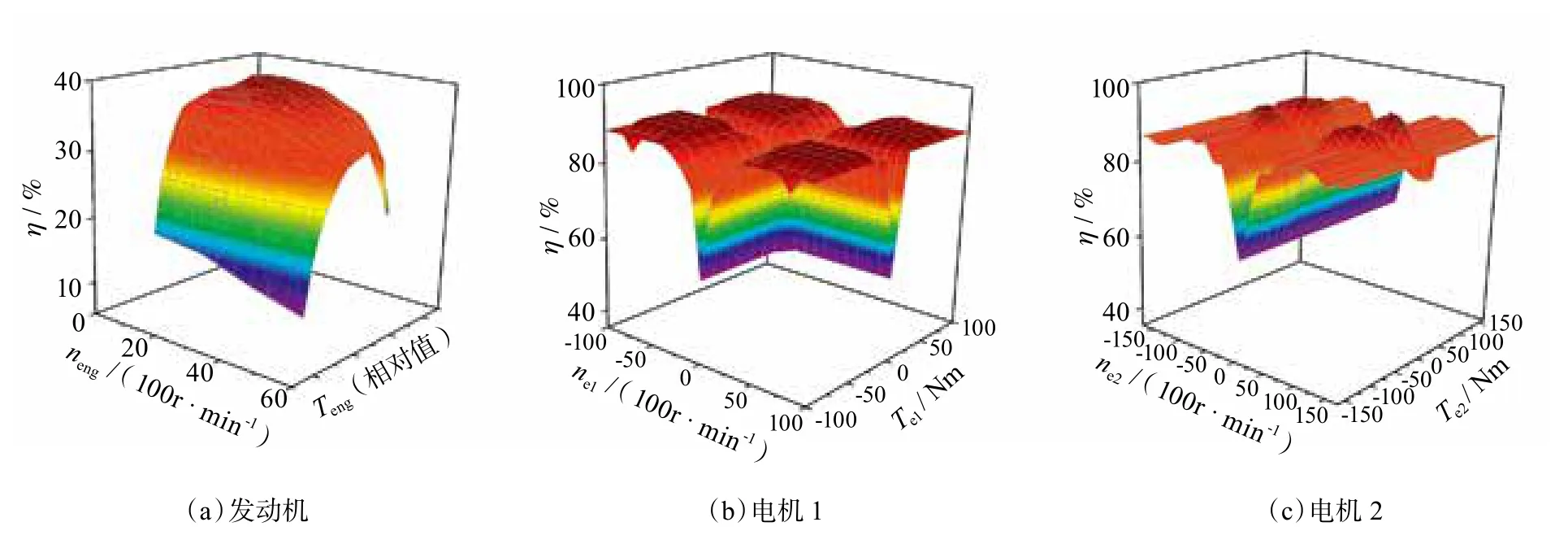
图3 发动机、电机的效率等高图
1.2 传动系统及车辆模型
本动力系统为单行星排平行轴构型,行星轮系统由齿圈(ring)、太阳轮(s)、行星齿轮(r)组成。
行星轮系统各部分的转速(n)满足:
电机2通过中间齿轮与齿圈耦合, 3个动力源之间的转速关系为

式中:ρ为行星轮齿数比;Ns为太阳轮齿数;Nr为齿圈齿数;i1为齿圈减速比。
行星轮系的扭矩传递关系:
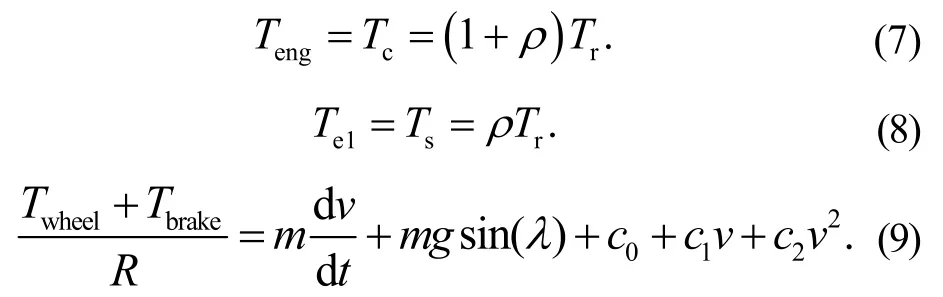
式中:角标eng、e1、e2分别表示发动机、电机1、电机2;角标c、s、r分别表示行星齿轮、太阳轮、齿圈;角标wheel、brake分别表示驱动、制动;R为轮胎滚动半径;c0、c1、c2为道路阻力因数;m为整车质量;v为车速;g为重力加速度;λ为道路坡度。
1.3 电池模型的建立
将电池看作一个理想电压源和一个内阻串联的等效电路,令t0表示初始时刻,则t时刻的充电状态(state of charge, SOC)为

其中:I表示瞬时电流,C为电池容量。
电池的充电效率、放电效率为:,
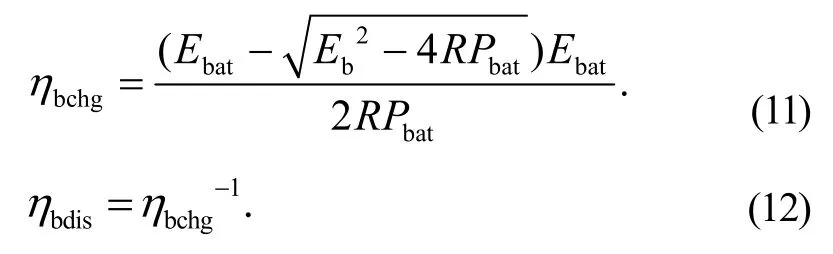
式中:Ebat为电池电动势,R为电池内阻,Pbat为电池输入或输出功率。
2 插电式混合动力系统综合效率评价函数
建模中,基于电池中能量的组成对电池储电效率进行修正。并考虑生产运输过程能量损耗代价,对系统不同运行模式下的能效进行优化。
2.1 电池-电机子系统效率评价模型
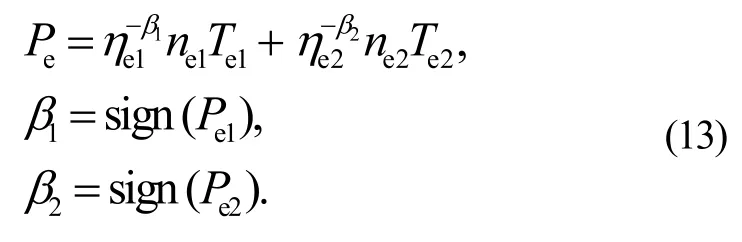
通过电网向电池充电时,电网电能转换损失的能量较小;但是当通过发动机向电池中充电时,由于发动机工作效率(η)较低,实际转换过程中所产生的能量损失会相对较大。电机总消耗能量为:
考虑到能量生产运输的损失,需要对燃油和电能在生产运输中的效率进行考量,假设炼油和运输汽油的效率ηgas为86%[3],电能的损失取决于所采用发电技术,由文献[10]可知2019年中国发电量构成情况,考虑到这些发电技术在实际应用中的占比,可以通过以下公式获得平均效率:
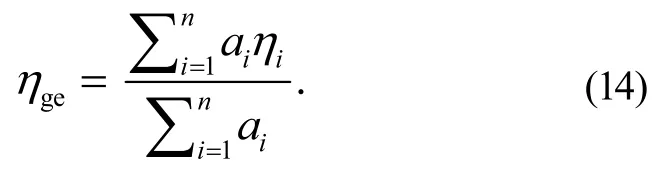
式中:ηge为电能平均生产运输效率,ai为每种发电技术的占比,ηi为每种发电技术的发电效率[12]。
随着实际和充电能量变化的电池修正效率为
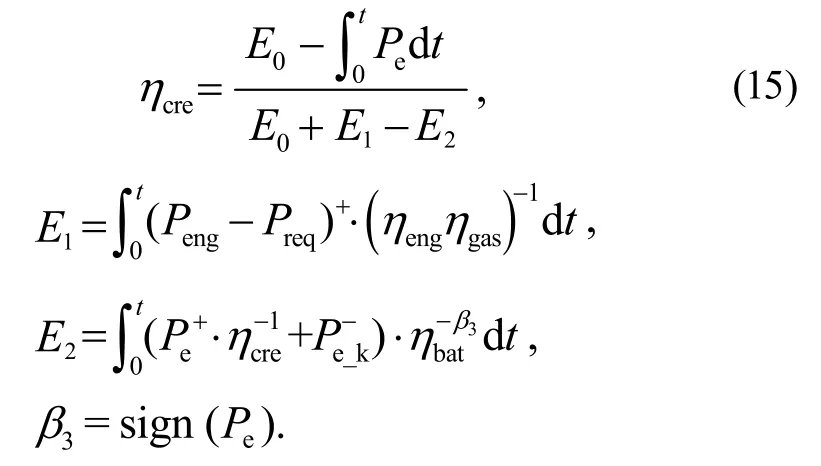
式中:Preq为需求功率,Peng为发动机输出功率,为通过制动能量回收的能量。分子表示t时刻的电池能量,分母为在t时刻电池所消耗或者补充的总能量,E0为初始电池能量,E1为通过发动机补充电量所消耗的能量。
2.2 不同工作模式下的系统效率评价模型
以驱动方式划分,本系统包括:单电机驱动、双电机驱动、混合驱动、制动能量回收等4种运行模式[13]。在不同的运行模式下,系统效率的评价模型不同。
1) 单电机驱动模式。电动机单独驱动车辆行驶,发电机空转。系统所消耗的总能量Ecost及系统综合效率ηtot为:
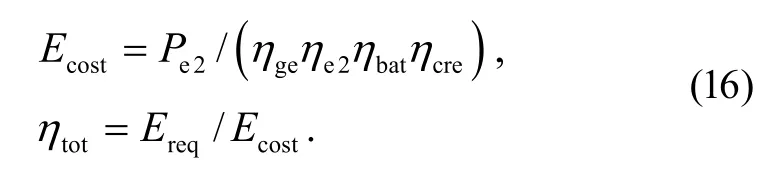
式中:Ereq为驱动车辆所需的能量。
2) 双电机驱动模式。当需求扭矩超出驱动电机额定扭矩且电池电量充足时,混合动力系统以双电机模式驱动,发电机输出扭矩,驱动车辆。该模式下,2个电机特性不同,效率也不同,有必要建立相应模式下的系统效率模型,优化能量分配,实现系统效率最优。消耗的能量及系统综合效率为:

此时2个电机均作为电动机向外输出功率。
3) 混合驱动模式。2个电机既可以作为发电机也可以作为电动机,发动机不仅工作驱动车辆,也可以通过多余的能量向电池充电。系统消耗的能量及综合系统效率为:
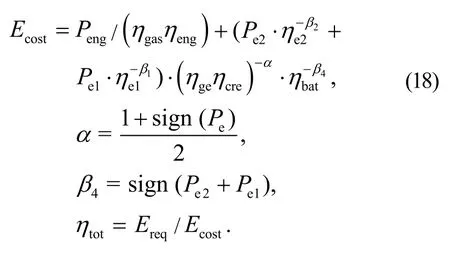
在给定车速、SOC、需求功率的情况下,寻找最优的发动机和2个电机的功率分配关系,使得系统效率最高。
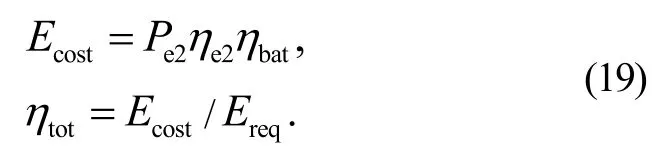
4) 制动能量回收模式。当车辆需要减速制动且电池SOC低于上限值时,可以通过电动机制动回收多余的能量,从而实现车辆的减速。电机制动也存在能量转换的损失。该模式下系统需求功率为负,电动机发电向电池充电。系统获得的能量及综合效率为:
3 复合式能量管理策略的构建
3.1 复合式能量管理策略架构
针对插电式混合动力系统能效的耦合性和时变性,本研究提出基于预设规则和动态优化相结合的复合式能管理策略,通过预设规则快速确定车辆运行模式,根据动态优化算法以系统综合效率评价函数最优为目标对能量协调分配进行优化,并将系统效率作为混合动力系统模式切换的依据。实现系统的动态能效优化。集成后的能量管理控制策略结构如图4所示。
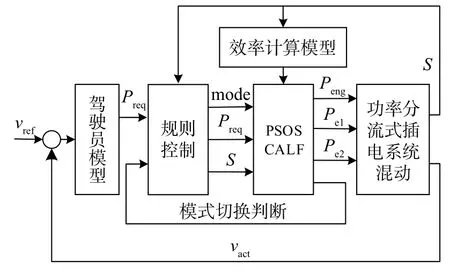
图4 PSOSCALF算法与规则集成的策略框图
图4中系统效率模型用于计算当前车辆状态下各个动力源的实时效率,并通过计算发动机累积充电量对电池效率动态变化进行修正。图4中S表示车辆状态信息。集成后的能量管理策略在原有规则的策略基础上,对不同运行模式,分别以不同的系统效率评价函数为最优目标进行能量分配寻优,并在每一次优化过程中对电机驱动和混合驱动下系统的综合效率进行比较。当目标需求功率下当前模式功率分配效率较低时,控制策略会发出模式切换命令指导规则进行模式的切换,使混合动力系统始终处于最优驱动模式下。
3.2 复合能量管理策略的规则构建
能量管理策略是决定整车运行的能耗经济性和动力性的关键环节,基本思想是根据各个动力部件的工作特性,对动力传动系统控制,实现发动机和电机之间合理的能量分配[14]。
基于分层架构构建的能量管理策略规则,将所有运行和控制模式分为驾驶模式层和能量管理层。根据车辆实际工作状态,运行模式分别有:停机模式、停车充电模式、单电机驱动模式、双电机驱动模式、混动模式1(电机为主能量源)、混动模式2(发动机主能量源)、混动模式3(电机和发动机共同驱动)、制动能量回收模式、机械制动模式。
3.3 复合式能量管理策略的优化算法构建
为了实现系统效率的优化,需要在预设规则的基础上,对不同运行方式下系统可能存在的状态进行对比寻优,因此,需要一种高效准确的寻优算法。
粒子群算法(particle swarm optimization, PSO)是一种基于社会搜索和群体智能的算法,其特点是速度快,参数数量少易于实现。然而,粒子群算法易陷入局部最优,全局搜索能力弱的缺点。本文以PSO算法为基础,加入正余弦算法(sine cosine algorithm,SCA)中的位置更新方程式和Levy Flight算法,提高算法的性能。在SCA算法中,解决方案更新的数学公式是基于正弦和余弦函数方程,保证了算法的开发和利用能力[15]。Levy Flight是一种随机分布,可以在空间中进行更有效的搜索[16],可以在寻优过程中避免陷入局部最优。本文采用的优化算法为“基于正余弦算法和飞行算法改进的粒子群优化算法(PSO based on sine cosine algorithm and levy flight, PSOSCALF)”。
结合SCA算法和Levy Flight分布后的PSOSCALF算法的粒子速度和位置更新方程为:

式中:Vi(t+1)和Xi(t+1)分别是粒子i在迭代t+1处的速度和位置矢量;c1和c2分别是个体学习因子和社会学习因子;w为惯性因子;levywalk[Xi(t)]为加入Levy Flight的粒子位置矢量;r1、r2、r3、r4为随机数;XgBest是迭代t次后的全局最优点;r4为正余弦之间的切换因子;r1指定解决方案的下一个位置方向;r2定义了朝向或背离终点的距离远近;r3为终点引入随机权重。为了平衡探索和利用,正余弦的取值范围应该自适应调整,r1随着优化迭代逐渐减小。
PSOSCALF优化的流程如图5所示。
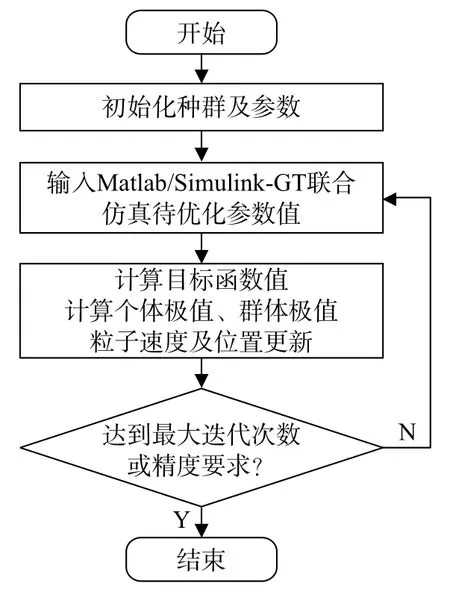
图5 PSOSCALF优化流程图
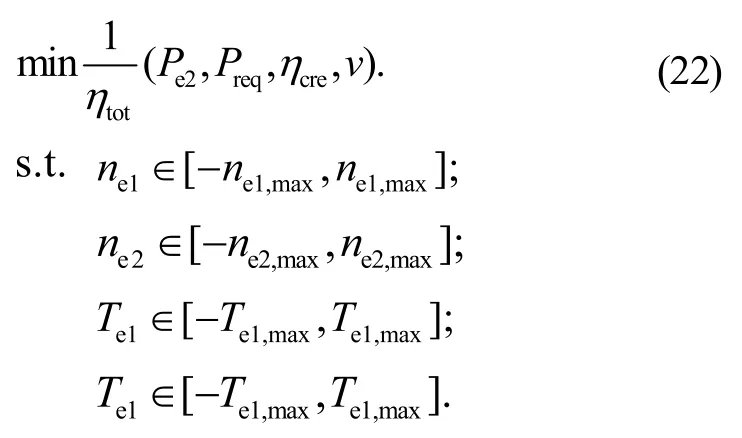
在不同的运行模式下,算法的优化变量不同。如在系统处于双电机驱动模式时,选取的优化变量为驱动电机的功率,优化模型可以表示在约束条件下确定需求功率、确定车速及修正电池效率下的效率寻优问题:
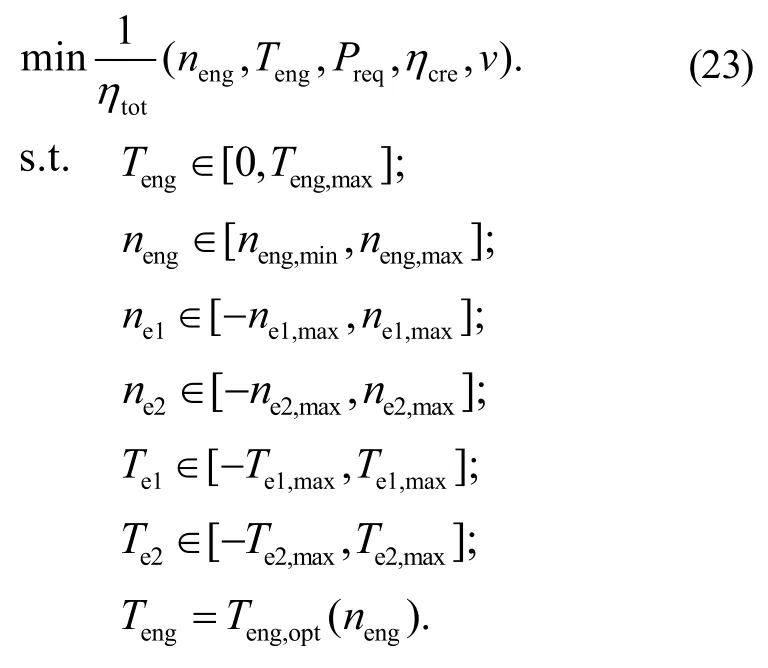
当混合动力系统处于混合驱动模式下时:选取的优化变量为发动机功率,为了保证最大化提高发动机效率,将发动机的操作工况固定在最高效率线上,通过调节电机1扭矩稳定发动机目标转速。此时优化模型及约束条件可以表示为:
4 优化结果及仿真分析
本研究通过Simulink-GT联合仿真平台上对控制策略进行了效果验证。其中边界条件来源于2个连用的全球统一轻型汽车测试循环(worldwide harmonized light vehicles test cycle, WLTC),其输出实际车速与参考车速如图6所示。仿真车速与参考车速基本吻合,说明整车控制策略能满足车辆运行过程中的动力需求。
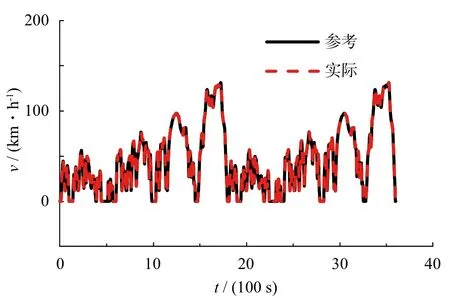
图6 实际速度与参考速度
在连用的WLTC工况下,针对功率分流式混合动力系统,分别对基于规则及基于预设规则和动态优化相结合的能量管理策略,进行仿真对比分析。发动机工况分布密度对比及工况点在万有特性中的分布如图7所示,其中白色圆圈为发动机工作点。
从图7中可以看出,基于系统综合效率优化的策略仿真结果中发动机工况点更多的集中于发动机高效率区。同时,通过计算均方根误差(RSME)对发动机工况分布集中度进行评价。RSME反映了数据偏离目标值的程度。通过计算,在基于规则策略的控制下,发动机工况分布的RSME值为19.2;而基于动态优化策略的控制,RSME值为14.8。可见在基于动态优化策略下的工况点相对于基于规则的策略更加集中分布在最优工作线附近。
图8给出了仿真运行的电机1和电机2的工况分布对比。通过计算最终的平均效率得到电机1的平均效率优化前为0.64,优化后为0.647,电机2的平均效率优化前为0.759,优化后为0.764。
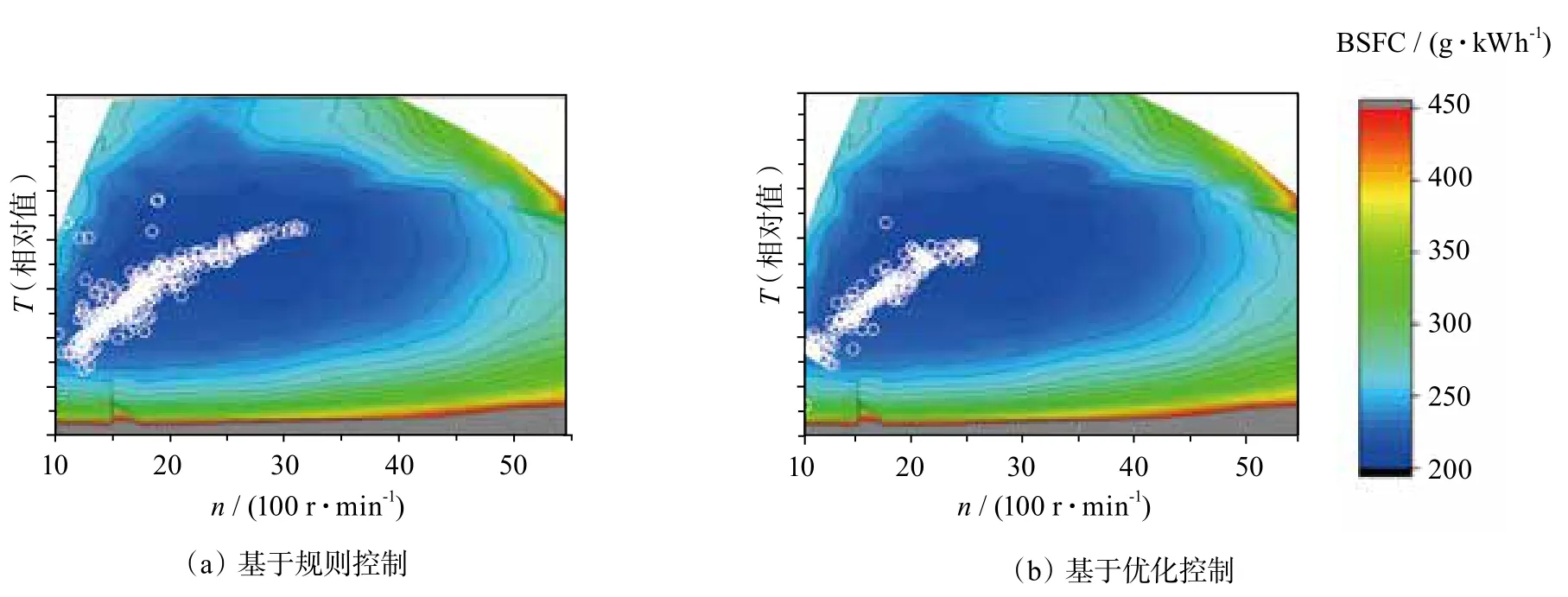
图7 发动机工况点分布
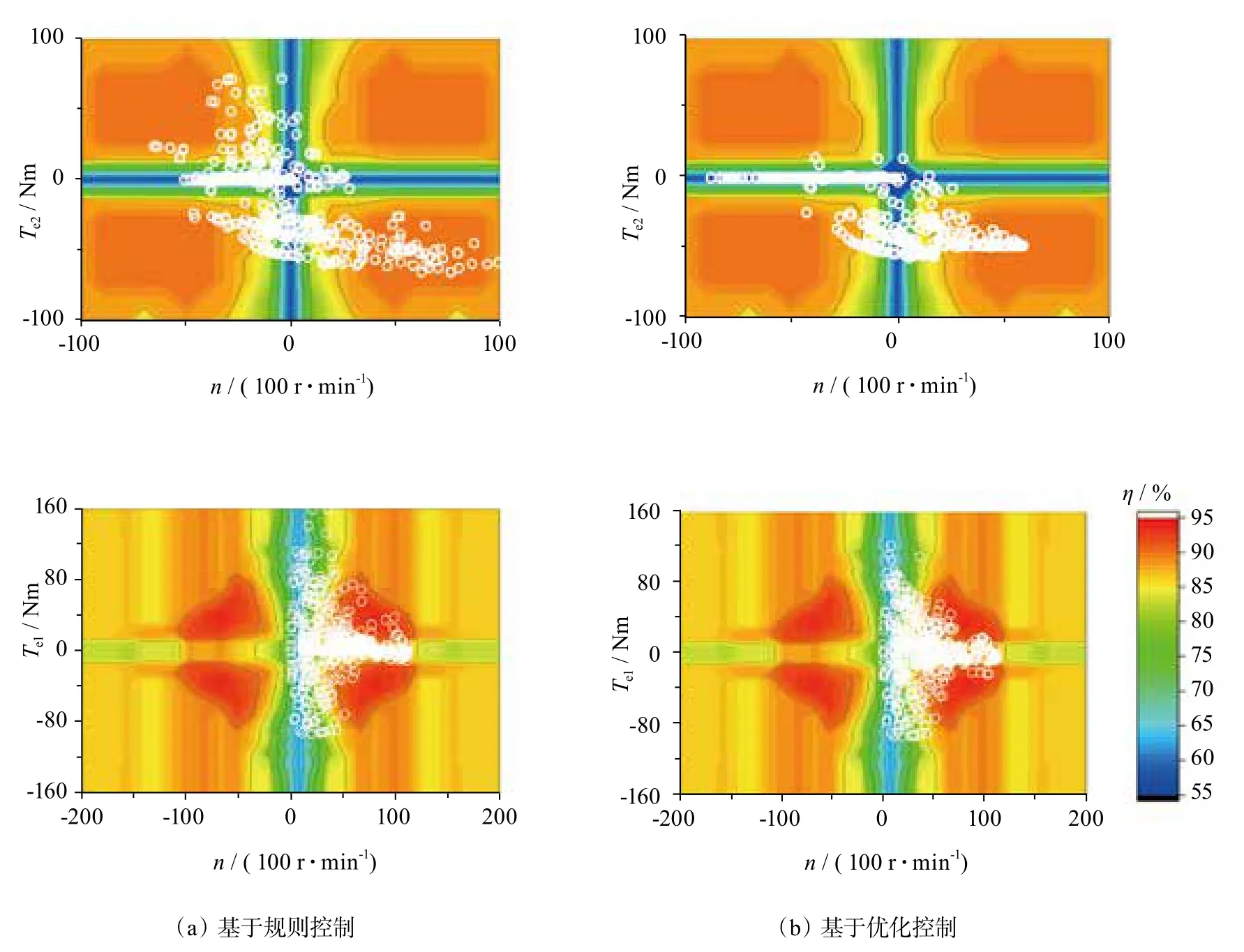
图8 电机1及电机2工况点分布对比
插电式混合动力系统的综合能耗对比如图9所示。其中:E为系统能耗,黑色实线为考虑生产运输效率后系统基于规则控制下的循环能耗;红色点线为基于预设规则和动态优化相结合的复合能量管理策略优化后的系统循环能耗。相对于优化前的结果,系统能耗降低了10.6%。
为验证此能量管理策略的适应性及插电式混合动力系统效率的动态性和时变性。分别对两个连用的全球统一轻型汽车测试循环(New European Drive Cycle,WLTC)和2个连用的新欧洲驾驶循环(NEDC),分别在初始电量为60%和80%的初始条件下进行仿真对比,能耗仿真结果如表2所示。
不同初始条件及工况下优化前后的能耗对比曲线如图10所示,其中:E60为初始电量60%时的能耗,E80为初始电量80。
由仿真结果可知:在初始电量为60%时,在2个WLTC循环及2个NEDC循环下,优化后能耗分别降低了10.6%和12.5%。在初始电量条件为80%时,在2个WLTC循环及2个NEDC循环下,优化后能耗分别降低了7.8%和9.8%。在电量较高的情况下,同样的循环系统能耗会相对较少,这是由于系统会优先消耗效率较高的电能。可见基于综合效率最优的优化方法在不同的工况及初始条件下均可有效提升系统综合能效。
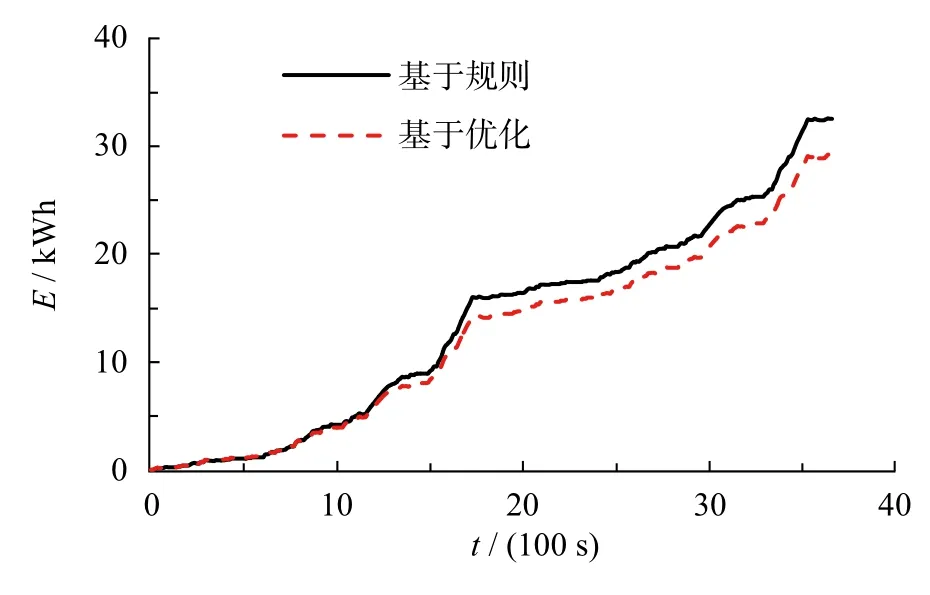
图9 优化前后系统综合能耗对比

表2 不同初始条件及循环下能耗对比
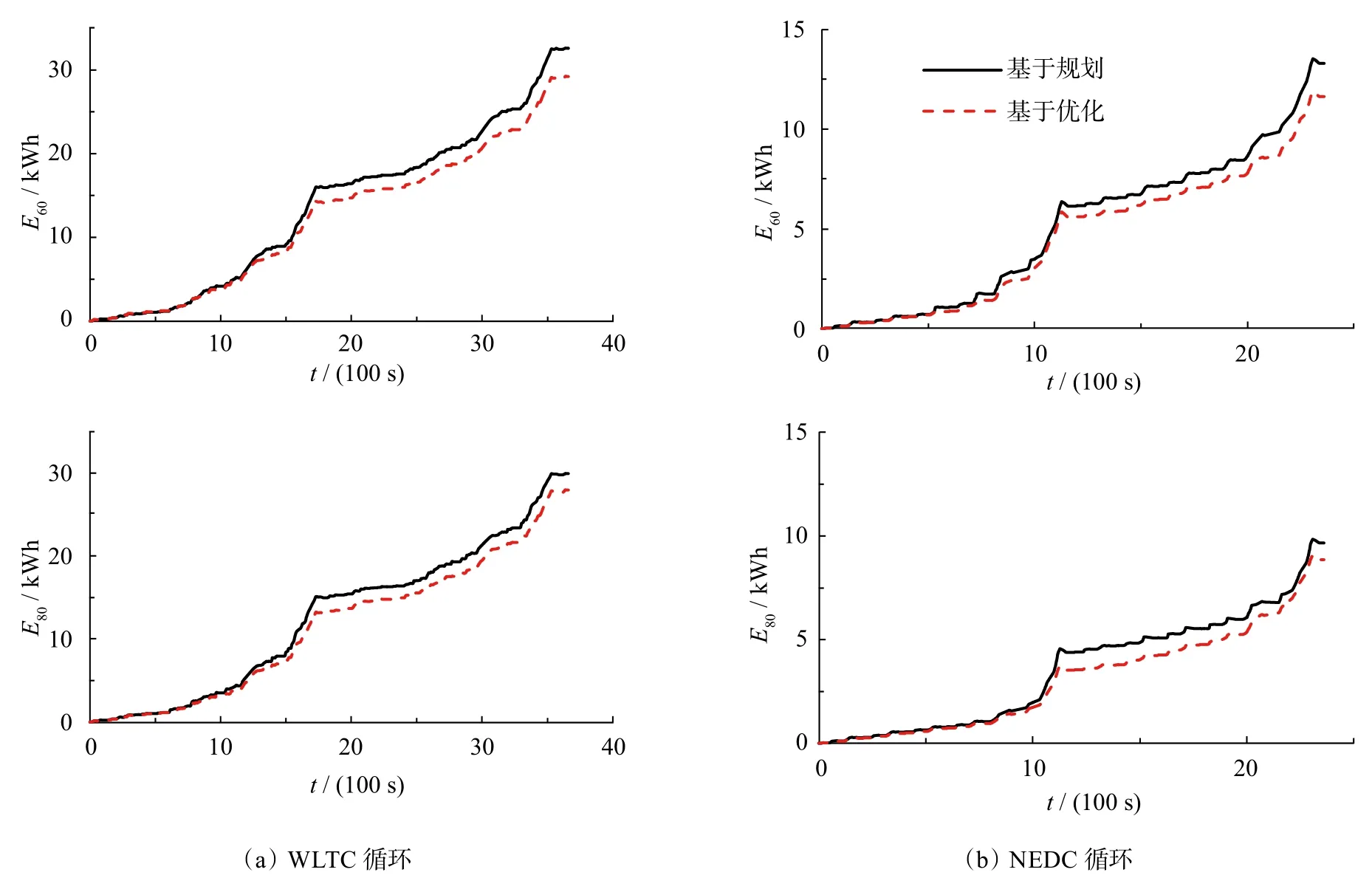
图10 不同初始电量条件及循环下能耗对比
5 结 论
本文针对插电式混合动力系统综合效率存在时变性和耦合性所造成的能量优化管理难题。基于Simulink-GT-Suite联合仿真平台,开展功率分流插电式混合动力车辆(PHEV)综合能效管理优化研究,通过建立电池能效评价模型及提出不同模式下的系统效率评价函数,并以系统效率最优为目标设计了复合能量管理策略。通过仿真得到主要结论如下:
当车辆在经过连续2个“全球统一轻型汽车测试循环(WLTC)”仿真后,采用基于预设规则及动态优化相结合的复合能量管理策略,使发动机及电机在实际运行中的工作点更加集中在高效率区;相对于未考虑系统综合效率的策略,系统总能耗降低了10.6%。在不同初始电量条件下,该能量管理策略在WLTC及NEDC循环下均可有效降低系统能耗。相对于基于规则的策略,优化后的电机工作点总体效率也得到提升,工况点分布更为集中。