基于子孔径相位误差拼接的相位梯度自聚焦算法
2021-04-20王文王伟张俊
王 文 王 伟 张 俊
(西安电子工程研究所 西安 710100)
0 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种具有高分辨率特性的遥感技术。正如文献[1]中指出,平台的运动轨迹的质量对成像效果有着至关重要的影响,是SAR成像的基础。激光惯性导航系统和全球定位系统为运动补偿提供了有力的数据支撑,但雷达成像的分辨率越高,对于惯导数据精度要求就越高,一些中小平台并未装载高精度的惯导系统,或者平台具有高振动特性,这时就需要利用自聚焦算法进行运动补偿。
相位梯度自聚焦算法(Phase Gradient Autofocus,PGA)是一种经典的应用于聚束SAR中的自聚焦算法。因其原理是基于数据而不是模型的,故其拥有着可以对高阶相位误差估计的优势,因而广泛应用于SAR图像的自聚焦处理中并取得了良好的效果[2]。在后续的发展中,雷达成像领域的工作者又在PGA算法的基础上,提出了加权极大似然-相位梯度自聚焦算法(Weight Maximum Likelihood-Phase Gradient Autofocus)WPGA,质量相位梯度自聚焦算法(Quality Phase Gradient Autofocus)QPGA等诸多改进算法。文献[3]中指出,成像算法虽然在对数据的处理过程中考虑了距离单元徙动(Range Cell Migration)RCM对成像的影响,并对其进行了矫正,但是这种RCM矫正是针对于理想航线和场景中心点进行的矫正,并没有对由于运动误差而带来的包络偏移进行修正。并且,运动误差会在多普勒域引入额外的信号调制,这会使得回波数据在多普勒谱出现偏移和畸变,造成数据在方位匹配滤波时出现包络展宽,而且这种现象会随着斜视角的增大而愈发明显,因此在进行成像处理前对回波进行精确的运动补偿是十分有必要的。
本文提出一种基于子孔径相位误差拼接的PGA算法(Subaperture Phase error-PGA)SPPGA算法,将全孔径划分为若干子孔径以减少残余的RCM对于自聚焦算法的影响,并使其可以应用到条带SAR的成像算法中。
1 FFBP算法介绍
假设雷达发射线性调频信号为
(1)
其中,τ为快时间,fc为发射信号载频,Tp为发射信号脉宽,γ为调频率。

(2)
单一点目标的回波信号经过去除载频和匹配滤波后,表达式为

(3)
其中t为方位慢时间,Ta为方位孔径时间。
对信号做距离向的傅里叶变换,并进行匹配滤波使场景中心回波相位为零,得到信号

(4)
信号为FFBP算法处理前的信号。在平面波前提假设条件下,差分距离Ra-Rt可表示为
(5)
其中θ和φ分别是天线相位中心的瞬时方位角和俯仰角,将其带入式(4)中,得到
SB(Kx,Ky)=exp[j(xtKx+ytKy)]
(6)
其中Kx=4π(fc+fτ)cosφsinθ/c,Ky=4π(fc+fτ)cosφcosθ/c。由式(6)可知,接收的原始回波信号与最终成像的目标函数间存在傅里叶变换的关系[4]。但是在实际中,回波数据的采样间隔在(t,fτ)域是平均分布的,与上述的空间频域(Kx,Ky)不符,为了实现信号在空间频域(Kx,Ky)的正交均匀采样,FFBP算法利用线性调频Z变换(Chirp-Z transform,CZT)来实现楔形石变换(keystone)。CZT变换是把在不同采样间隔情况下对虚拟慢时间域的离散傅立叶变换的计算,变成了求卷积的运算,从而利用卷积和定理,并采用快速傅立叶变换算法,实现了大大减少运算量的目的[5]。节省了重采样所需的运算资源。从文献[6]可知,该重采样操作可以使回波中的距离向信号和方位向信号二维解耦合,对于RCM和二次及高次距离弯曲有较好的矫正效果。
以上是在雷达平台按照理想运动轨迹运动的成像算法,由于平台必然会存在运动误差,在基于惯导数据的运动补偿后,残余运动误差会在数据重采样时对成像造成较大影响,甚至在运动轨迹偏差较大时无法成像,故需要在成像前,对其进行补偿。常用的自聚焦算法有MD、PD、PGA算法,本文采用可以对高阶相位误差估计的PGA算法作为基础。
PGA算法有一个前提条件是,仅考虑由于相对位置误差引入的相位误差,而忽略由其引入的RCM,即要求基于惯导的运动误差补偿至少要达到图像分辨率级别,但是随着高精度SAR成像的发展,残余少量的运动误差也会大于图像分辨率,若此时直接采用自聚焦算法,其聚焦能力会明显下降。此外,传统PGA算法是应用于聚束SAR的,对于条带SAR而言,图像中点的相位历程仅包含在一段数据中,无法像聚束SAR中的点一样满足其相位历程包含于整个数据段的要求,故需要对现有的PGA算法进行优化。
本文提出的SPPGA算法将全孔径划分成若干有重叠部分的子孔径,这样可以使得每个子孔径内的残留RCM可以近似忽略,并且在进行相位误差梯度估计时,选择的距离样本相位历程可以包含整个子孔径。
2 WPGA算法简介
WPGA算法是在传统PGA算法基础上的扩展算法,具有对距离样本的质量要求低,在迭代的过程中收敛速度快等优点。
WPGA主要分为以下五步:
第一步:样本选择。在整个数据域挑选一些具有高信杂比(SignaltoClutter Ratio,SCR)的距离样本。
第二步:圆周位移。首先对挑选的距离样本进行方位向的脉冲压缩,并将强散射点经过圆周位移的方式位移到图像的方位中心。可通过将强散射点所在距离单元沿一维方位圆周平移至图像中心来补偿多普勒线性相位[7]。
第三步:加窗滤波。圆周位移后,需要对图像域的强散射点进行加窗滤波以提高距离样本的SCR,经过不断迭代减少窗的长度来实现图像的聚焦。对于窗长的选择,有自适应和固定值两种模式。实际情况中,常采用通过预先设定逐步减少窗长的方法来实现强散射点聚焦。
第四步:相位梯度估计。将循环移位和加窗滤波后的样本数据转换到方位时域,在方位时域对样本数据的相位误差进行相位梯度估计[8]。传统PGA算法处理中经常采用的估计算子有如式(7)、式(8)两种。
(7)
(8)

(9)
其中,wk为第k个距离单元在相位估计计算中的加权值。
第五步:迭代运算。对估计得到的相位误差梯度进行累加或积分得到相位误差函数,令其与原始的相位历程数据相乘,而后进行傅里叶逆变换[10]。重复进行第二、三和四步,直到达到图像中强散射点的收敛,使图像完成聚焦。
3 SPPGA算法
孔径分割时的长度需小于单个目标点在数据段中保持完整相位历程的长度,这使得原本应用在聚束SAR上的自聚焦算法得以应用在条带SAR上,且可以使得在子孔径内,残余的RCM可以近似忽略。在进行子孔径相位误差拼接时,需要考虑传统PGA算法中忽略的线性相位和初始相位对拼接带来的影响,并通过线性拟合的方式来减弱其带来的影响。下面给出本文提出的完整的SPPGA处理流程:
1)回波数据分割
对于脉压后的回波数据,在距离向上截取靠近场景中心的一部分,这部分数据一般具有较高的SCR。
2)子孔径划分
要求相邻的子孔径之间有一定的重合区域,该区域用于后续对子孔径间的线性相位误差进行修正。子孔径的长度应小于一个目标点在方位向上的数据长度,这样可以使得其相位历程包含于整个子孔径。
3)样本选择
将划分后的子孔径数据在距离向进行求和,对结果进行从大到小的排序,取排名靠前的距离单元作为距离样本,这样强散射点的相位历程是整个数据段的,实现相位历程的连续性。
图1是五个仿真点回波脉压后的数据,对其进行子孔径划分,以第3孔径为例,C点在该子孔径内有完整的相位历程,B点和D点在该子孔径的相位历程是不完整的,若B、C、D具有同样的反射强度,即B、C、D整个数据段的加和是一致的,那么对第3孔径进行样本选择,按照上述样本选择的方式,C点在该子孔径内数据段的加和最大,就会选择C点所在的距离单元作为样本,这样就保证了选择的样本在子孔径内相位历程的完整性。
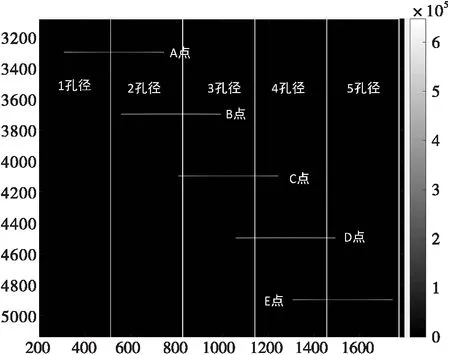
图1 五点仿真图
4)子孔径相位误差估计
对每个子孔径采用WPGA算法进行处理,并对得到的结果进行累加,得到相位误差估计。
5)子孔径相位误差拼接
对通过WPGA算法计算获得的子孔径相位误差中的重叠部分做差,然后利用一次函数对得到的差值进行线性拟合,得到相邻两个子孔径之间的线性相位误差。再用后一个孔径误差减去得到的线性相位误差部分,使得每一个子孔径相对于前一孔径进行相位误差的线性修正,直到完成对所有子孔径的修正。最后对重合部分取均值,实现两个子孔径相位误差的拼接。
下面对相邻子孔径间相差的线性相位进行解释,假设图象中的一个距离单元有且仅有一个强散射点,其复振幅和横向位置分别为A1和x1,则这一单元的复图像可写成表达式A1S(x-x1)。某一距离单元的复图像与其对应的数据序列互为傅里叶变换对的关系,若序列以离散值m(=0,1,2,...,M-1)表示,则该距离单元对应的数据序列为|A1|e-j(mΔkxx1+φ0)(式中Δkx为离散波数域的波数单元,φ0为起始相位)。对于经过变换得到的离散序列,相位梯度可通过差分计算得到,即Δφ(m)=4πx1/λ。对于不同子孔径的重叠部分而言,由于其孤立点的位置不同,其相位梯度是不同的常数,而且在由相位梯度计算相位误差时,设起始相位为0,所以由相位梯度进行累加得到的相位误差表现为具有不同起始相位和不同比例系数的一次函数,故子孔径重叠部分的相位误差做差值表现为线性相位。
6)全孔径相位修正
利用得到的全孔径相位误差估计,对数据进行相位修正。
SPPGA算法减弱了残留的RCM对传统自聚焦算法的影响,避免了子孔径间的相位误差梯度跳变,使得相位拼接成为可能,保证了样本点在数据域相位历程的完整性,使得用在聚束SAR上的PGA算法得以应用于条带SAR。该相位误差矫正对于基于惯导数据补偿后残留的RCM进行了矫正,可以使得FFBP算法正常成像,但是并不能百分百的将相位误差全部补偿,残留的相位误差仍会对成像造成影响,故需在成像后,再次对图像进行自聚焦处理。完整的流程图如图2所示。
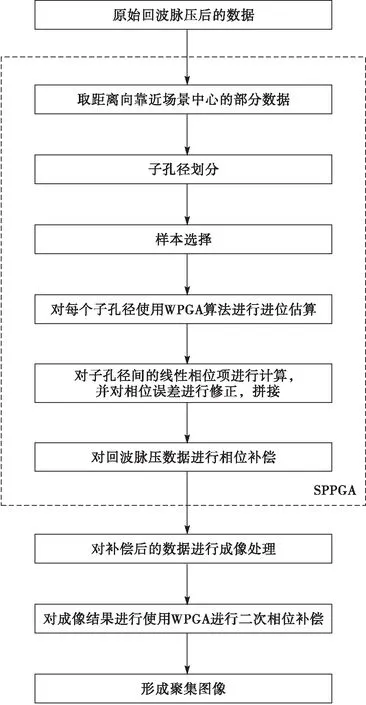
图2 完整成像算法流程图
4 实验分析与验证
为了验证上述处理流程的有效性,下面对某Ku波段合成孔径雷达的实测数据进行处理,该数据的载频为16 GHz,信号带宽为1.2 GHz,距离分辨率优于0.15 m,成像作用距离16 km,脉冲重复频率为500 Hz,平台速度为50 m/s,脉冲积累数为8192点,将全孔径分为31个子孔径,重叠部分为256点。图3及图4为使用SPPGA算法进行相位补偿和未使用SPPGA算法进行相位补偿的对比图,及部分细节对照图。

图3 实测SAR图像成像效果对比图
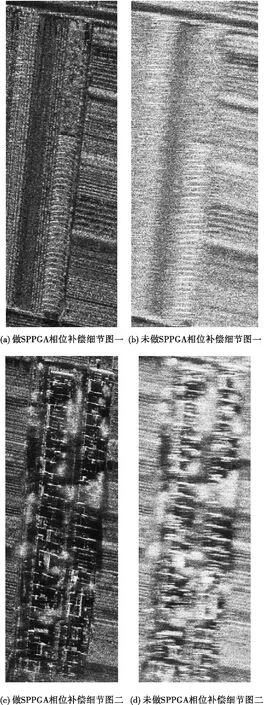
图4 实测SAR图像成像效果细节对比图
由图3整体对比图和图4细节对比图的结果可以看出,使用了SPPGA算法对回波数据进行运动补偿处理后的结果具有良好的聚焦效果,对于图像中强散射点的细节表现较好,未经过处理的图像存在严重的散焦现象,对成像结果计算二维熵,处理后的熵为7.3291,未处理的熵为7.7078,经过处理后图像的熵值有了减少,也说明了该算法有效改善了图像的散焦现象。图5为经过分割后的具有重叠部分的31个子孔径分别经过WPGA算法处理后所得到的相位误差值,图6为按照文中所述处理方式进行拼接后得到的全孔径相位的误差值。

图5 子孔径相位误差图

图6 全孔径相位误差图
可以看到拼接后的全孔径相位误差是平滑的曲线,在子孔径拼接处并未出现相位误差的跳变,说明本文提出的相位误差拼接方式是有效的。由图6可以看出,经过SPPGA算法计算得到的该实测数据中的斜距误差为0.4 m到-0.6 m,大于该图像的分辨率,此时若直接使用自聚焦算法无法对超过距离单元的相位误差进行很好的补偿。而且斜距仅1 m的误差就对图像造成了严重的散焦,大部分惯导很难达到如此精度,说明了自聚焦算法可以有效减少成像算法对于惯导精度的需求,体现了其在合成孔径雷达成像中的必要性。
5 结束语
本文针对SAR图像数据预处理中遇到的运动补偿问题,提出了一种基于子孔径相位误差拼接的相位梯度自聚焦算法。提出的SPPGA算法将全孔径划分成若干有重叠部分的子孔径,这样可以使得每个子孔径内的残留RCM可以近似忽略,并且在进行相位误差梯度估计时,选择的距离样本相位历程可以包含整个子孔径。实验结果表示,本文提出的算法可以有效对运动误差进行补偿,实现高精度成像。