基于数据分发服务的无人机任务载荷综合仿真平台研究
2021-04-17杜越洋闫智超
杜越洋,赵 盾,闫智超
(1.海鹰航空通用装备有限责任公司,北京 100074;2.北京交通大学计算机与信息技术学院,北京 100044)
1 引 言
现代无人机主要执行战场侦察与监视、目标截获、火力校正、摧毁评估以及电子诱骗与电子干扰等任务,在军事与民用领域发挥着日益重要的作用[1-2]。无人机通过装备各种任务载荷完成上述各项目标。无人机任务载荷是指那些装备到无人机上为完成特定任务的设备,包括执行电子战、侦察和武器运输等任务所需的设备,如信号发射机、传感器等,但不包括飞行控制设备、数据链路和燃油等[3]。无人机任务载荷的快速发展极大地扩展了无人机的应用领域,根据无人机的功能和类型的不同,其上装备的任务载荷也不同[4]。
在无人机载荷选型过程中,为了论证载荷设备是否匹配任务需求,一般需要进行多次的实验室和外场机载试验[5]。外场机载试验受设备、天气、场地和时间等诸多因素限制,每次试验的准备和进行过程复杂、时间周期长且实验成本很高。为了解决上述问题,仿真实验手段在载荷选型论证过程中得到广泛应用[6]。
利用载荷仿真实验进行无人机载荷选型论证,可以加快选型过程,减少载荷选型中的客观因素影响,做到载荷选型有据可依、选型效果直观可见。具体来说,其主要优势在于:(1)可以实现全天候、全地形、全时段的载荷试验,不受天气、空间和时间的限制;(2)不受实际载荷设备的限制,只需要获取某一载荷的参数指标,就可以进行载荷试验;(3)大幅减少实物载荷外场试验的次数,从而大幅降低载荷选型费用;(4)可以构建和积累品种、型号丰富齐全的载荷库,快速、重复地进行载荷试验,在实验中任意搭配载荷产品;(5)通过大量仿真实验还可以尽快发现各品种型号载荷传感器的问题和缺陷,在实际应用过程中发现载荷传感器能力的不足之处,尽快实现从应用到研发的正反馈。
无人机任务载荷综合仿真涉及的学科种类繁多,如飞行控制、任务规划、通信仿真、载荷仿真等,多仿真系统集成有利于解决不同仿真软件碎片化严重、仿真系统灵活性差、仿真效率低及仿真结果展示不够直观等问题[7],国内很多高校和研究所已开展有关方面的研究。北京交通大学设计了一种适应于多种型号的无人机地面综合实验平台,包括无人机地面飞行仿真、地面检测和故障诊断三个部分,实现对无人机的数据采集、分析和智能故障诊断[8]。西北工业大学设计的无人机综合仿真系统将飞控系统、航电设备、遥控设备、数据链、导航算法等形成大的闭环进行仿真验证,能够对飞行过程进行高逼真度的模拟训练[9]。然而很多系统仍然存在仿真平台功能受限、仿真数据量大且冗余度高、仿真结果展示不够具象等方面的问题。
本文中的无人机载荷综合仿真平台,以载荷仿真为主体,结合分组对抗、通信仿真和效能评估一体化,是一种可以支持仿真模型开发、产品与系统功能验证以及系统展示的综合性仿真平台,支持纯数字仿真、有人参与的“人在回路”仿真和实物设备接入的“系统在回路”的半实物仿真[10]。在整个仿真过程中,仿真平台同步展示仿真场景态势,实时回传和显示无人机载荷画面,模拟网络通信效果,并在仿真结束后可以收集各项仿真结果并进行仿真效能评估。
2 仿真平台架构设计
2.1 系统架构
无人机任务载荷综合仿真平台是由多个软件子系统组成的综合仿真平台,每个软件子系统部署在一台或多台计算机上,所有计算机通过一台千兆以太网交换机连接在一起。交换机和计算机之间通过双绞线网线连接,网络环境为千兆局域网。系统硬件结构如图1 所示。
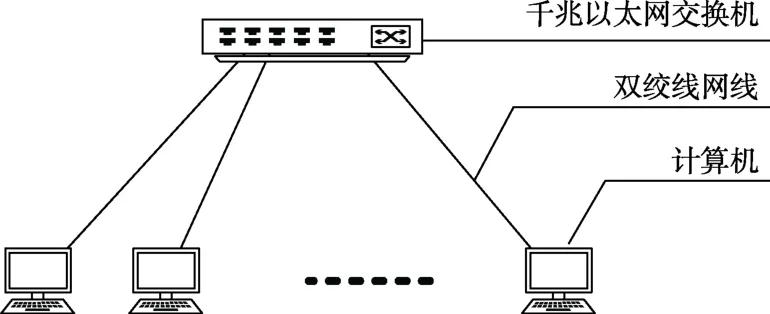
图1 系统硬件结构Fig.1 System hardware structure
每个子系统通过消息通信接口接入整体系统当中,子系统直接通过公共的总线即消息交互总线(简称为总线或消息总线)进行消息交互,实现分布式联合仿真。系统架构如图2 所示。
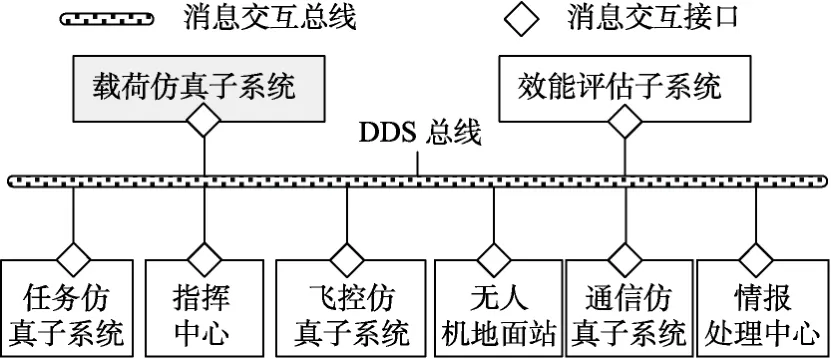
图2 系统架构Fig.2 System structure
各个子系统间使用数据分发服务(Data Distribution Service,DDS)进行通信,DDS 是以数据为中心的数据分布消息中间件,采用发布/订阅体系架构,能够提供实时信息传送,强调以数据为中心,提供丰富的QoS 服务质量策略,能保障数据进行实时、高效、灵活的分发,可满足各种分布式实时通信应用需求。其最大的优势就是松耦合,应用程序可以使用一个简单的Topic 名称来指定它想要读或者写的数据,以及使用以数据为中心的API 来直接读写数据,数据仅存在于那些对它感兴趣的应用程序的本地缓存中[11]。它将创建和发送数据(数据发布者,Publisher)的软件与接收和使用数据(数据订阅者,Subscriber)的软件分离开,可以很好地兼容系统中各个组件、实体以及操作系统的异构性[11]。图3 展示了任务仿真子系统向其他子系统下发环境态势的DDS交互流程。

图3 DDS 数据传递过程Fig.3 Data transmission process based on DDS
2.2 软件组成
无人机任务载荷综合仿真平台包含多个软件子系统,分别是任务仿真子系统、指挥中心、三维展示软件、载荷仿真子系统、情报中心、总控软件、飞控仿真子系统、无人机地面站、通信仿真子系统以及效能评估子系统,为无人机载荷验证提供需要的仿真场景,所有软件及子系统均连接在DDS 总线上进行消息交互。除此之外系统还包括多个数据库,包括设备实体库、三维模型库以及载荷库,为系统提供真实的仿真模型及参数信息。系统软件组成如图4 所示。
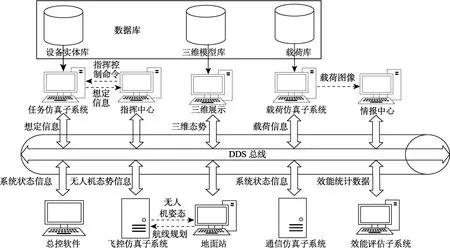
图4 系统软件组成Fig.4 System software components
总控软件负责控制整个系统的运行状态,并实时监控各个子系统的当前状态。任务仿真子系统用于试验无人机载荷在一定的任务想定下的工作能力,可以模拟虚拟环境中各方对抗过程,提供设备部署、任务规划、剧情编辑和仿真推演功能;在仿真过程中,通过指挥中心的控制可以实现“人在回路”,使各方操作人员参与到仿真推演过程当中。飞控仿真子系统接收任务仿真子系统的想定信息以及地面站所规划的航线,调整控制无人机姿态,实时产生精确的飞行轨迹,系统提供模块化的多机协同控制算法,包含行为控制法、深度学习法等多种协同控制方法。
载荷仿真子系统实现对无人机载荷系统的模型仿真和控制、监视功能,包括对载荷信息源和载荷工作状态的仿真,指令控制、状态回报、载荷下传信息的仿真。实时模拟无人机机载电视、红外观测设备生成动态红外辐射场景以及机载合成孔径雷达的生成及目标图像,具备提供不同传感器成像仿真的能力。载荷仿真子系统所生成的图像在情报中心集中显示,供无人机操作员判断和下达指令。三维展示软件可以根据任务想定及三维实体库中的模型生成整个场景的三维态势,便于了解整个仿真场景的概况。
通信仿真子系统能够为任务仿真子系统、载荷仿真子系统、无人机地面站之间提供通信支持,实现不同场景下无人机之间、无人机与地面站之间的数据链通信功能,模拟通信过程中丢包、延迟等网络特性。效能评估子系统收集通信仿真子系统、任务仿真子系统和载荷仿真子系统的实时数据和效能统计数据,将所有信息进行综合评估,自动生成效能评估分析报告,对任务达成程度进行评估,并给出改进建议,为仿真计划的制订与载荷的配置提供参考。
3 仿真平台工作流程
3.1 系统执行流程
无人机载荷综合仿真平台支持整个系统当中的所有软件子系统进行协同仿真。通过系统协同仿真,既可以为工程技术人员提供软硬件技术和设备的仿真验证环境,以分析各子模块产品的适用性,也可以为用户提供直观的演示效果,验证整套无人机任务系统的效能。
对于所有软件子系统全部参与的系统综合仿真应用来说,分为三个阶段:想定准备阶段、仿真运行阶段和仿真收尾阶段。
想定准备阶段主要是完成各个子系统的准备工作。首先要完成无人机任务的制定,并在任务仿真子系统中根据任务需求进行仿真剧情编辑以及想定的编写,同时对其他所有参与此次仿真的子系统完成相应的实体参数和模型配置。当所有子系统完成配置且加入总线上后,可以进入仿真运行阶段。仿真运行阶段由总控软件下达仿真开始指令,任务仿真子系统将想定信息下发给其他子系统,然后按照预先规划好的任务逻辑进行推演,并将无人机姿态等环境态势信息定时发布到消息总线上面。地面站为每个无人机规划飞行航迹,飞控仿真子系统根据规划的航迹,调整控制无人机姿态,实时产生精确的飞行轨迹,并将精确的无人机姿态返回到总线上,供其他系统使用。载荷仿真子系统不断通过传感器获得仿真场景图像,经过通信仿真子系统发送到情报中心进行集中显示,由情报中心人员根据获取到的图像进行判断。指挥中心收集己方信息,并通过无人机载荷收集对方情报,进行信息综合后,发出指令给任务仿真子系统。三维展示软件对整个场景的三维态势进行展示。通信仿真子系统对无人机与无人机之间以及无人机与地面站之间的通信进行仿真,模拟环境中真实的通信环境。仿真收尾阶段由效能评估子系统根据仿真过程中各子系统生成的仿真数据进行汇总分析,对整个无人机任务进行评估。整个系统的仿真流程如图5 所示。
3.2 系统数据交互流程
无人机任务载荷综合仿真平台采用仿真模拟的技术手段,构造出接近实际场景的虚拟无人机环境信息传递给任务载荷仿真软件,载荷仿真软件实时渲染仿真出的数据并回传给无人机任务载荷基础仿真实验环境系统,用于进一步数据分析处理,二者关系如图6 所示。

图5 系统综合仿真应用场景流程图Fig.5 Flow chart of application of integrated simulation system
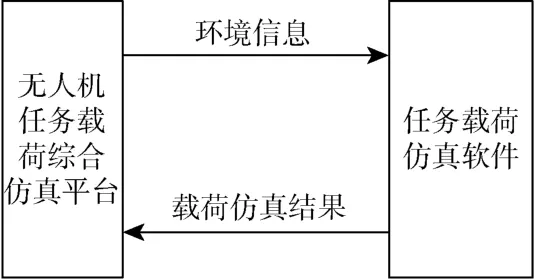
图6 无人机任务载荷基础仿真实验环境系统Fig.6 Basic simulation experiment environment system of UAV mission payload
对于整个综合仿真平台,涉及的子系统软件众多,并且软件之间存在大量的信息交互和信息依赖,软件之间的信息交互复杂,仿真平台内部各个子系统的仿真数据流动如图7 所示。
仿真人员在任务仿真子系统上进行任务想定的编辑,任务仿真子系统根据兵力实体库中读取的实体参数,生成整个仿真场景的态势信息,并下发给其他所有子系统。飞控仿真子系统根据地面站的无人机航线信息对无人机飞行状态进行模拟,并将精确的无人机姿态返回给任务仿真子系统。载荷仿真子系统根据载荷库中的载荷参数配置进行载荷图像的模拟仿真,并将图像发送给通信仿真子系统。通信仿真子系统根据当前无人机通信状态模拟数据传输,将传回的载荷图像发送到情报中心进行集中显示。仿真过程中,指挥人员通过指挥中心下达指令,发送给任务仿真子系统,对仿真节点进行实时控制。仿真结束后,各个子系统将效能统计数据发送给效能评估子系统,效能评估子系统总结效能评估结果并生成效能评估报告。
4 仿真平台应用
4.1 仿真平台效果
通过一次全系统联合仿真实验对平台具体应用流程进行叙述,并对平台展示效果和仿真结果进行分析,具体流程如下:
首先构建本次任务的仿真场景,红方作为作战任务的防守方,部署了无人预警机和地面雷达对敌方来袭目标进行发现和跟踪,从而保护地面重要目标;蓝方为作战任务的攻击方,在海面上部署了进攻兵力,攻击机从航母上起飞攻击红方重要目标。
根据此次任务在任务仿真子系统上进行想定的编辑,首先设置任务对应的场景和气象环境参数,然后根据任务需求对红蓝方的各个兵力进行部署和装备配置,并编写每个实体的任务逻辑,各个兵力的逻辑共同构成整个场景的仿真推演剧情。任务仿真子系统完成想定编辑后结果如图8 所示。
仿真开始后任务仿真子系统将仿真场景中红蓝双方兵力的实时态势发送到总线上,各个仿真子系统根据收到的数据进行仿真推演。飞控仿真子系统根据系统模拟仿真,调整无人机姿态,产生精确的飞行轨迹和各种飞行参数,并将其发送回任务仿真子系统,修正飞机态势。地面站软件接收己方飞控发来的飞机参数,并进行实时显示,飞行操控人员可以对飞机的姿态以及飞行路径做出调整。
载荷仿真子系统根据无人机位置姿态、无人机所挂载的载荷类型、参数以及实时状态,对载荷信息进行解析和显示,生成对应的载荷图像,其中载荷类型包括可见光载荷、红外载荷和雷达载荷;并且在仿真过程中,无人机操作人员可以通过鼠标及摇杆对载荷的姿态、视场角等进行实时控制,适应不同任务的需求。当蓝方飞机靠近红方重要目标时,红方无人机发现来袭的蓝方实体,并对蓝方实体进行跟踪。图9 为红方无人机载荷观测到的载荷画面。
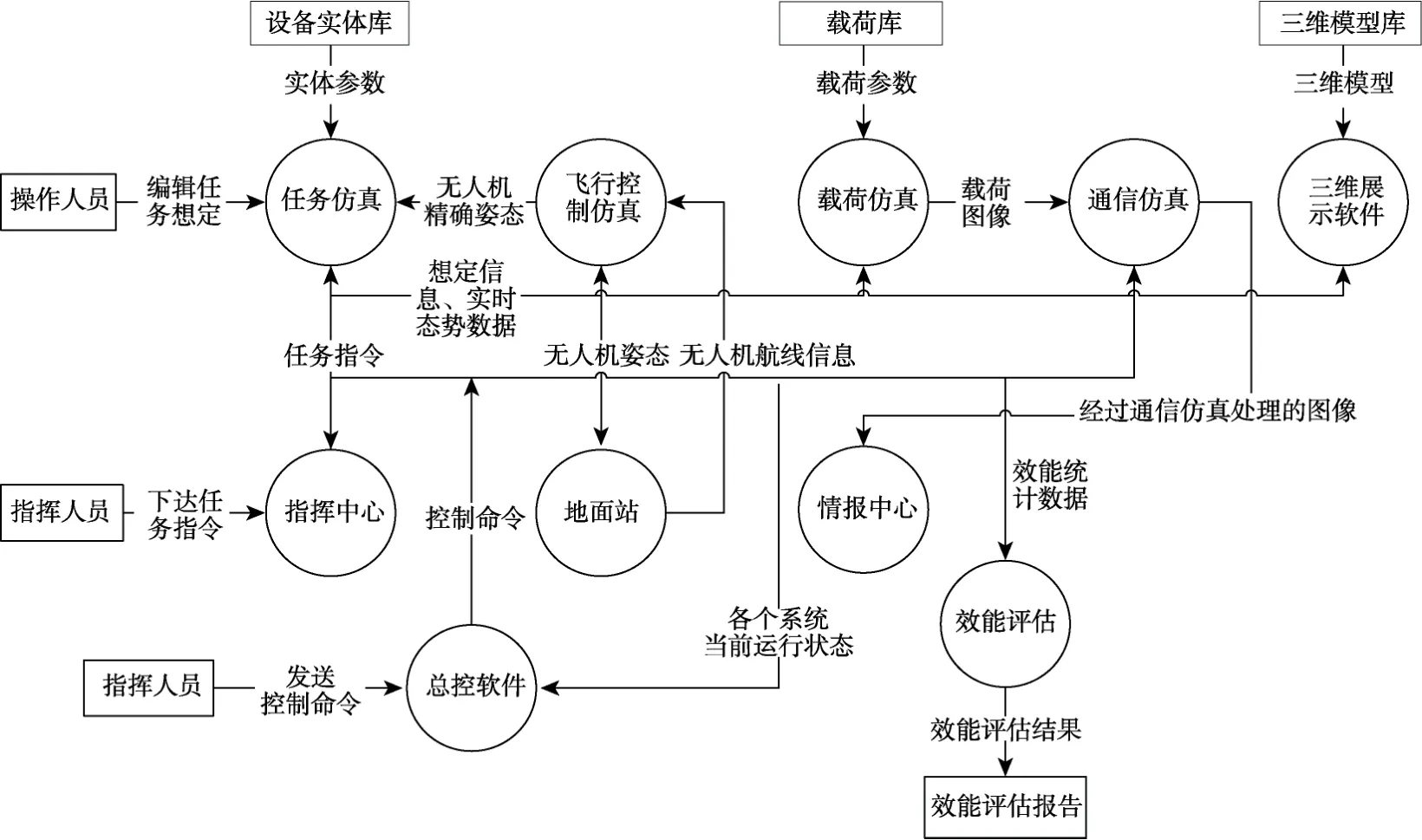
图7 综合仿真平台数据流图Fig.7 Data flow diagram of integrated simulation platform

图8 任务仿真任务规划界面Fig.8 Task planning interface of task simulation system

图9 红方无人机载荷图像画面Fig.9 Payload image screen of red UAV
在仿真过程中,各方指挥人员可以通过各自指挥中心软件观测到己方实体的实时位置和状态,以及己方所探测到的对方单位;根据实时情况可以在仿真过程中进行任务规划,对无人机及载荷的行为逻辑进行调整,实现对己方单位“人在回路”的控制,有利于探索更为有效的无人机及载荷使用模式。
通信仿真子系统、任务仿真子系统和载荷仿真子系统会在仿真过程中将实时收集到的数据发送给效能评估子系统,并且在仿真结束后,统一将收集好的全部相关数据发送给效能评估子系统。由效能评估子系统将所有信息进行统计和评估,自动生成效能评估分析报告,对整个任务进行评估。
以通信仿真效能分析为例,针对无人机与无人机之间以及无人机与地面站之间的通信链路负载、链路占用、链路时延、吞吐量、丢包率等典型通信质量评价指标进行评估并打分,可以及时发现网络异常,评估整体网络效能和网络瓶颈。图10 为效能评估子系统对通信仿真的综合评估页面。
除了可以对单次仿真结果进行评估,还可以对同一场景进行多次仿真综合评估。通过改变无人机部署情况、无人机行为逻辑、无人机装备参数以及载荷参数等,对任务流程和任务结果产生影响,效能评估将多次仿真结果进行综合评估,可以比较不同任务模式以及不同装备参数下对任务的影响,从而选取更为合适的无人机使用模式和装备,为实际任务提供参考。
以任务仿真综合效能评估为例,针对作战任务中的兵力部署情况、兵力损失情况、导弹命中率、发现目标概率、作战任务完成率以及根据不同作战任务所制定的作战效能指标进行评估。对同一场景下不同作战模式结果进行对比,有利于选取最为合适的作战部署和作战模式。图11 为同一场景下多次仿真的任务仿真综合评估页面。

图10 通信仿真综合评估页面Fig.10 Comprehensive evaluation page of communication simulation system
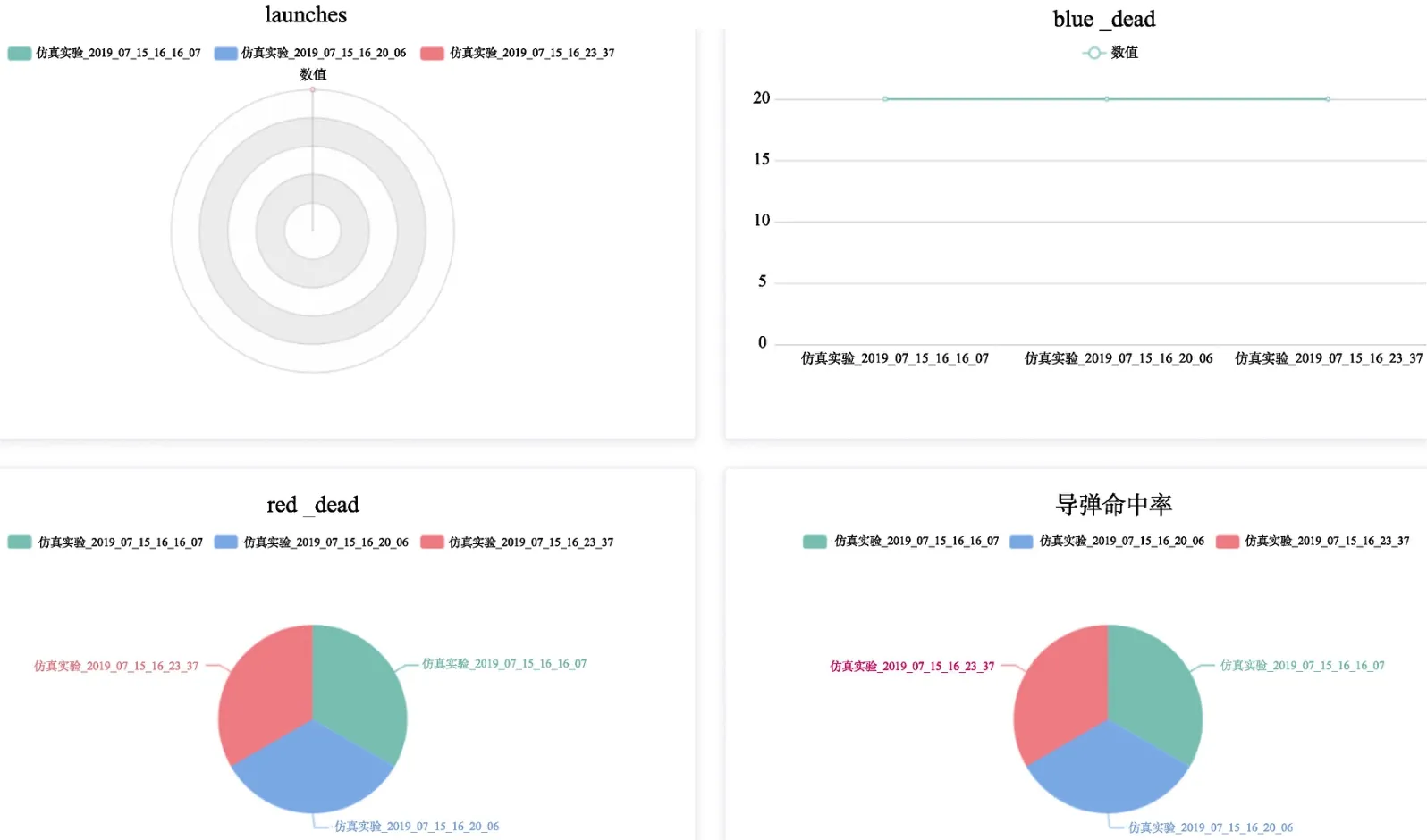
图11 任务仿真综合评估页面Fig.11 Comprehensive evaluation page of task simulation system
4.2 仿真平台意义
该仿真平台功能完善,涵盖无人机载荷验证的各个环节。该平台可以灵活地进行无人机任务的部署,操作人员通过观察整个场景的二维及三维态势,可以快速了解整个场景概况,根据场景实际情况可以动态地调整无人机与载荷状态,为探索无人机以及载荷的使用模式提供了便利条件。载荷仿真子系统支持多种类型载荷,具有丰富的载荷库,并且支持载荷参数自由配置,可以实现载荷的全天候、全地形、全时段的仿真分析。综合效能评估可以直观地对仿真结果进行汇总和评估,便于研究人员分析当前无人机与载荷使用模式的弊端与不足,发现载荷装备的瓶颈,为载荷研发与选型咨询提供参考。
该仿真平台系统采用DDS 总线的分布式仿真架构,为系统的更新和扩展提供了天然的优势。在各个仿真节点,将界面显示、仿真模型、应用软件与总线通信接口分离,分别独立开发,实现了数据和业务功能的分离。
5 结束语
本文针对无人机载荷选型以及载荷试验过程复杂、试验周期长、试验成本高的问题,设计了一种以载荷仿真为主体,同时结合任务仿真、通信仿真、飞行控制仿真以及效能评估的综合仿真平台,该平台采用DDS 通信技术简化了不同软件的数据交互流程,可以方便地实现多系统分布式联合仿真。并且该平台可适用于各种载荷试验场景,不受天气、时间、空间以及实际载荷设备的限制,通过大量仿真试验可以尽快确定载荷选型、载荷设备缺陷以及适合的载荷使用模式,极大地提高了载荷测试效率,为实际载荷设备的改进以 及使用提供了参考。
