陆战分队空地一体无人作战系统装备体系构想研究
2021-04-17卜昭鹏王庆彪
龚 旻,卜昭鹏,陈 梅,王庆彪,王 鸿
(1.中国华腾工业有限公司,北京 100080;2.31663 部队,云南 650032;3.77126 部队,云南 661600)
1 引 言
伊拉克、叙利亚、也门等国际热点地区实战战例表明,分队级中小规模编组作战已成为现代战场主要作战形式之一。随着智能化战争时代来临,传统陆战分队以层级式指挥、“机动平台”为中心、集中兵力优势、地面攻击为主的作战模式,逐步向集任务中心式智能指挥决策、战场综合态势感知、有/无人协同指控[1]、分布式空地无人编队作战、火力网络化集群射击[2]、无中心自组网通信为一体的新型空地一体无人作战模式发生深刻演变。未来陆战分队需适应全天候、全时段复杂多变的战场环境,在敌我犬牙交错的时敏变化态势下,有效应对小规模、高烈度特殊作战任务,充分利用天、空、地、电磁、网络等多域信息优势,将作战人员与新型作战装备(察打一体无人机、无人导弹战车)及智能弹药进行有机结合[3-5],创新空地一体无人体系破击战等新型战法,形成非对称信息优势、决策优势和行动优势。因此,研究如何构建智能战争时代陆战分队空地一体无人作战系统装备体系,对实现陆战分队快速自我构建新型有/无人协同、空地协同作战能力,快速形成新质多域作战能力具有重要意义。
2 美俄分队级无人作战系统装备体系发展趋势及优势分析
2.1 美国机器人战车部队装备体系建设
无人装备体系建设是美国陆军建设的重点,也是未来的主要发展方向之一。2009—2019年,美国国防部、陆军能力集成中心、陆军部、陆军机器人系统联合项目办公室等单位陆续发布了《机器人战略白皮书》《陆军无人地面车辆战略》《无人地面系统路线图》《美无人系统一体化路线图》《机器人和自主系统战略》《美国陆军科学与技术项目备忘录》等规划文件[6-7],全面勾画未来25年无人系统的建设发展思路(见图1):自2020年起实现扩大作战人员作战范围,2025年实现有/无人情报编组,2030年完成自主编队行动,2040年最终实现联合兵种机动(见图2),把无人系统部署至反介入/区域拒止(A2/AD)区域,以实现在该区域的行动自由权。美军以陆战分队级作战部队装备建设为核心,计划在2026年装备第一支以智能无人装备为合作伙伴的机器人战车部队。

图1 美国陆军2015—2040年机器人和自主系统 能力发展规划[8]Fig.1 Robotic and autonomous systems roadmap of the U.S.army FY 2015—2040[8]

图2 美国陆军机器人和自主系统战略Fig.2 Robotic and autonomous systems strategy of the U.S.army
2.1.1 美陆军多域作战机动排设想及作战效能推演
2019年,美陆军发布2028年多域作战机动排设想[9],给出一个典型的排级多域作战任务场景(见图3)。排级智能有/无人协同作战指控系统可快速整合情报侦察、指挥控制、火力毁伤、机动突击、整体防护和综合保障等能力,通过无人机和无人战车混合编队进行空地一体全方位态势感知,将作战任务和战术行动图通过战术网络实时传送到作战单兵信息化装备,引导班组级作战单位快速到达指定位置,协助友军识别目标和作战评估。利用无人装备执行高危作战任务,并通过智能弹药精确打击降低附带损伤,人员非接触快速击败威胁目标,瓦解敌方作战意志。同期,美陆军机动作战实验室进行了“有/无人混编步兵排作战实验”推演,设置一个装备无人机和地面机器人的美步兵排进攻假想敌1 个步兵连的作战场景,其控制面积从传统步兵排不足1 km2扩大到75 km2以上,火力臂增加近10 倍,作战士兵通过网络化智能控制无人机和地面机器人混合编队,战斗力突破了传统作战理论攻防兵力3:1 限制,展示了巨大作战优势。
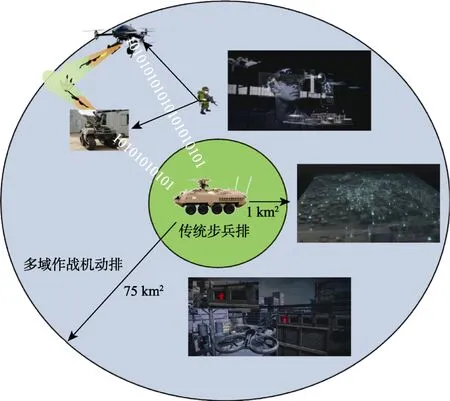
图3 美国2028年多域作战机动排设想示意图Fig.3 Diagram of the U.S.army in multi-domain operation 2028
2.1.2 美DARPA“班组X”试验项目
美国国防预先研究计划局(DARPA)于2016年3月正式启动“班组X”试验项目(见图4)。该项目通过系统集成无人机、无人地面车辆、先进传感器等新装备和机器学习等新技术,从而提升班组多域作战环境中的共享态势感知与有/无人协同组网作战能力。2018年11月,美军对洛克希德·马丁公司的“变形班组增强频谱态势感知与独立定位系统”以及CACI 国际公司的“电子攻击模块班组系统”进行了有/无人编队试验,验证了人工智能装备与步兵班组的高效协同作战能力[10-11]。美军重点推进“班组X”试验项目,计划构建智能无人装备为合作伙伴的作战部队,通过利用身体、认知和装备资源来降低班组机动时间并扩大机动空间;通过有/无人火力和机动同步来塑造战场优势(见图5)。由此可见,有/无人协同班组将成为未来陆战分队配置的新亮点。
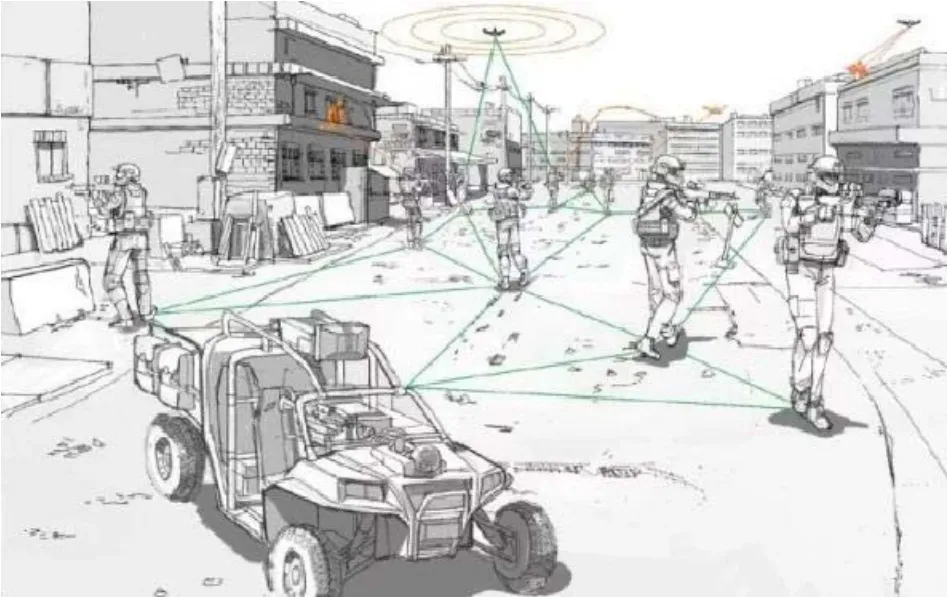
图4 美国“班组X”试验示意图Fig.4 Diagram of Squad X experimentation
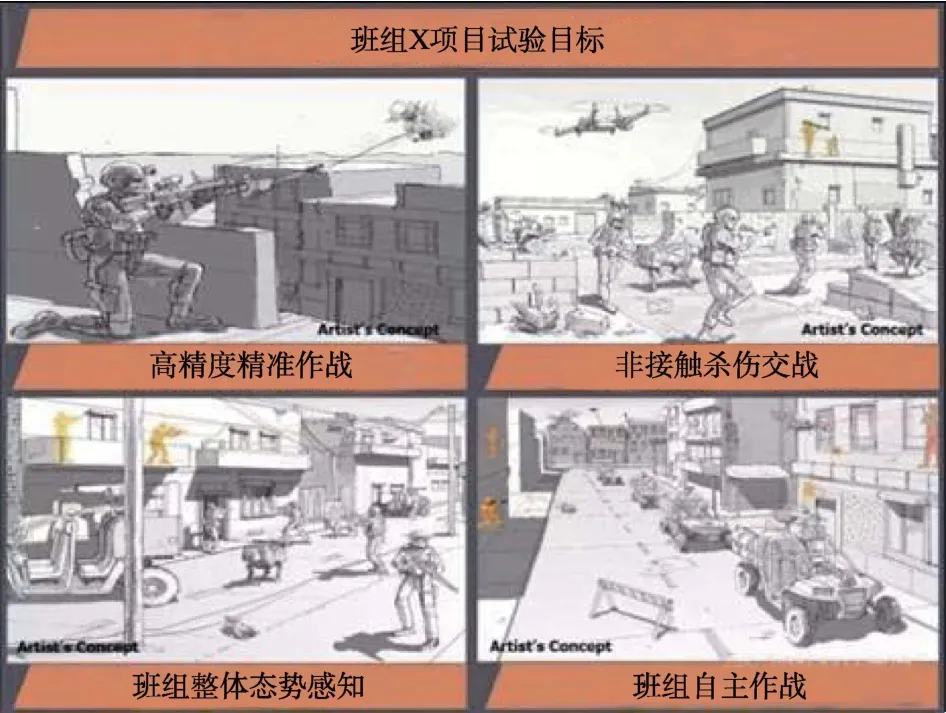
图5 美国“班组X”试验目标Fig.5 Squad X experimentation goals
2.1.3 美“龙骑兵”班组小队(MDS)

图6 美“龙骑兵”班组小队Fig.6 Diagram of MDS
2.2 俄罗斯无人作战系统建设
俄罗斯在无人作战平台领域虽然起步较晚,但研发速度较快,成为近年来俄罗斯军队建设不可忽视的亮点。2014年2月15日,俄罗斯总理梅德韦杰夫签署命令,宣布成立机器人技术科研试验中心;2015年12月16日,俄罗斯总统普京签署总统令,宣布成立国家机器人技术发展中心。这两个机构的成立,意味着俄罗斯已经开始在国家层面对无人作战系统的建设发展进行总体规划,重点关注无人机和地面无人战车的发展。俄军《2025年前未来军用机器人技术装备研发》综合计划表明,2020年开始制定“机器人部队组建任务”路线图,2025年完成组建战斗机器人部队,目标是无人装备在俄军装备比重达30%。
2.2.1 俄罗斯“仙女座–D”自动化指控系统
俄军在叙利亚首次使用“仙女座–D”自动化指控系统(见图7)。该系统具有实时综合态势信息收集、处理和分发能力,可实现分队级作战指挥部到士兵一体化指挥,曾指控6 辆“平台–M”无人战车、4 辆“暗语”轮式无人侦察车与3 架侦察无人机主导拉塔基亚某高地正面作战行动,仅以协同参战士兵4 人轻伤的代价,击毙了大约70 名武装分子[11-13],显示出陆战分队级有/无人协同作战的巨大行动优势。俄罗斯正发展天王星–9、“战友升级型”、“风暴R&D”等重型无人装甲作战平台,并逐步提升其自动化分析情报数据、自主探测、目标分类识别,独立决策和攻击等作战能力[14],未来“仙女座–D”自动化指控系统和重型无人装甲作战平台组成的分队级战斗机器人部队将具备机动灵活、指挥网络抗毁伤能力好、高危作战任务执行力强、低附带损伤等显著优势。

图7 俄罗斯“仙女座–D”自动化指控系统Fig.7 “Andromeda-D” automatic command and control system
2.2.2 俄罗斯新型反坦克集群系统
2019年,俄罗斯Dahir Insaat 新概念公司宣传了新型反坦克集群系统作战设想[15](见图8)。武器系统中反坦克无人机火箭发射车采取皮卡等小型车辆加装火箭模块(2 个),具有伪装、快速机动、灵活部署和简易维修等特点;反坦克无人机与火箭弹实现共形设计,发射时呈现火箭弹姿态,快速到达指定空域,侦察时呈现无人机空中集群值守态势,攻击时再次转换成火箭弹制导模式对坦克目标实现精准攻击;指控系统采用人机交互可视化指控系统,快速控制反坦克无人机集群建立战场态势,并完成攻击无人机集群时空位置分布。

图8 新型反坦克集群系统作战设想Fig.8 Operational conception of anti-tank swarm system
2.3 作战能力优势分析
未来,美俄以构建陆战分队级部队新质战斗力为核心,大力开展陆战分队级新型无人作战系统装备建设,创新实践有/无人协同新型战术战法,与传统机步排相比具有以下作战优势,见表1。

表1 新型无人作战排与传统机步排作战能力对比Table 1 Combat capability comparison between new-type unmanned platoon and traditional unmanned platoon
3 陆战分队空地一体无人作战系统构想
本文认为陆战分队空地一体无人作战系统应以构建一个轻量级 C4ISRK 作战装备体系为目标。新型无人作战系统不是直接替代现有分队级制式装备,而是通过配置“分队级有/无人协同作战指控系统”(以下简称:分队级指控系统)重塑“人与机器”的战场功能配置,在区域/方向快速构建一个相对独立的有/无人协同作战体系;通过通信集群组网的方式,使有人作战分队战斗人员(配单兵信息终端)、空中无人平台、地面无人平台等作战单元和节点深度交联,无人装备平台携带火力、通信、侦察、电抗等任务载荷,战斗人员配备单兵信息终端,通过智能化的指挥控制系统,从“时间、空间、情报类型/手段、火力密度/强度、攻击距离/方向”等方面对分队的作战能力进行全方位拓展,实现空地协同与有/无人协同体系战斗力聚合,有效解决陆战场地面分队级作战缺乏近距空中情报、快速火力支援、自主通信保障的迫切需求,缩短反应时间,掌握实时态势,快速指挥决策,形成立体交战能力,实现作战效能倍增,最大限度地降低作战人员的伤亡风险。
院级仿真实验室建设由校级部门主持协调,统筹学校资源,协调各院、系、学科间的联合研发,统筹资金、配备人才、合理分工,打破学院壁垒,定位校内、校企共享。
3.1 分队级有/无人协同指控系统
按照分队级、排级配属相应机动作战智能有/无人协同指挥控制系统。分队级指控系统能集中指挥1—3 个作战排进行集中式作战,也可以通过高速宽带战术网络分布式指挥作战排应对不同方向的作战威胁;分队级指控系统能融入上级陆战指挥体系,也能与友邻分队进行有效协同。排级指控系统具有独立指挥作战能力及必要时替代指挥能力,应具备作战任务规划、装备与火力规划、通信组网、情报融合、战场综合态势构建、作战任务分配、目标指示及对网内无人作战平台编队集群火力控制等功能,充分发挥无人作战平台机动灵活、集群作战、高危任务替代的特点和作战人员的现场决策与操控优势。新型空地一体无人作战排组成构想如图9 所示。
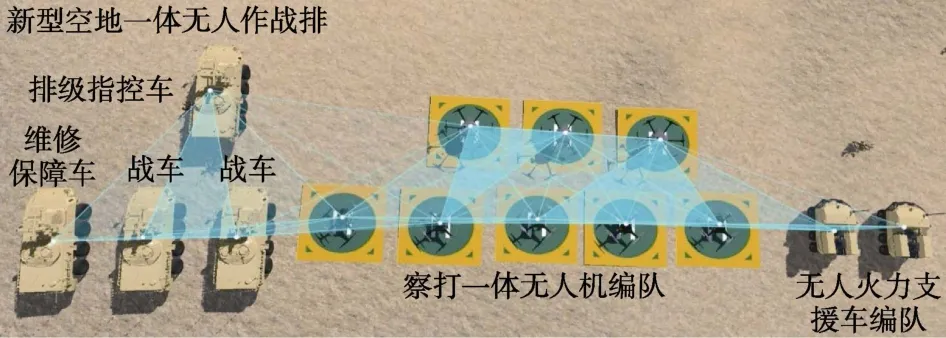
图9 新型空地一体无人作战排组成构想Fig.9 Operational conception of new-type air-ground unmanned platoon
3.2 空中无人察打一体编队
空中无人编队主要执行侦察、打击、通信中继、战勤支援等作战任务,集群协同搜索快速构建战场态势,搜索、跟踪和识别任务目标,既可为友军火力提供目标指示,又可快速穿越复杂地形对敌军进行集群集火攻击或定点摧毁。鉴于分队级部队配备的空中无人平台载荷能力相对有限,应聚焦于打击轻型战术车辆、简易工事、临时指挥所、作战人员等易摧毁和高时敏性目标。空中无人平台武器载荷类型包括制导/非制导火箭弹/炸弹/榴弹、末敏弹、集束手榴弹、机枪等。
3.3 地面无人火力支援编队
地面无人火力支援编队应注重与有人作战分队进行战术协同,与分队现有武器装备配置形成有效协同,通过配置多重量及一定基数智能弹药,对防御工事、坦克及装甲车辆、武装直升机等坚固或高价值目标进行毁灭性打击,并通过换装不同载荷实现抵近侦察、步战协同、火力突击、战术防空、战勤支援等多类作战任务,单辆无人战车应具备复杂地形通过能力,配备火力强度应不低于一个班的反装甲火力。地面无人火力支援编队应与空中无人编队典型作战目标侧重有所不同,更加注重于火力突击、开辟通路、夺控前沿等高危作战任务。
3.4 信息化战斗人员
作战部队战斗人员应配备单兵智能装备,作为信息节点加入分队级网络,能与空中无人平台、地面无人平台进行信息交互,具备战场接管并操控无人平台近距作战的能力。
3.5 机动装备维修保障系统
通过配置现场级机动装备维修保障系统,对无人机、无人车及相关载荷进行现场维修保障,保证无人作战装备具备持续战斗能力。
综上所述,陆战分队空地一体无人作战系统(见图10)以构建排级独立作战单元为基础,将异构型空中和地面无人装备、地面作战人员、近后方指挥控制人员等组成整体协同作战编队。无人装备与作战人员之间在信息、资源、任务计划、装备控制等多方面实现数据共享及协同;快速制订和更新作战计划、战场态势、可用资源等,进行协同作战的任务规划,完成火力分配和任务调度,并将任务规划的结果以指令形式发送至无人作战装备及地面战斗人员,在计算服务的支持下实现智能化的指挥控制。无人装备依据作战指令及各参数诸元的接收和解算,自主执行特定行动,并在地面指挥控制席的监控和指挥下或被控制接管的地面作战人员控制下,完成攻击目标的稳瞄解算、打击时间和条件、火力发射与制导等工作,实现地面目标打击,并同步进行毁伤效果监视和效能评估。
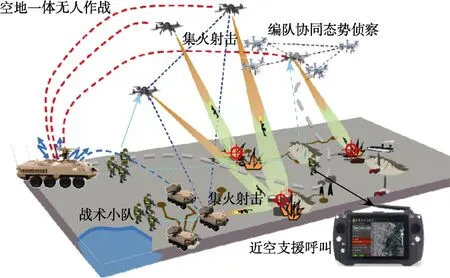
图10 陆战分队空地一体无人作战示意图Fig.10 Diagram of air-ground unmanned operation for land units
4 系统未来关注重点技术方向
4.1 情报-决策-打击-评估一体化集成
多个无人平台实施协同作战的特点之一就是在夺取火力优势的同时,制信息权争夺也空前激烈,且二者交织,呈现信息火力一体化的趋势[16]。有/无人协同空地一体化作战支援系统设计注重“情报、监视、侦察、打击”(ISR+K)功能整合方法研究,通过研究系统一体化集成技术,加强前端信息探测感知能力对末端火力系统的控制和支持,挖掘信息链式运动基础上“传感器即战斗力”的本质,通过综合运用系统软硬件设备集成、功能集成、信息集成和业务集成等方法,将无人平台上传统的ISR 系统与协同探测、协同打击能力紧密结合起来,实现“支援请求-侦察-决策-杀伤-响应-毁伤评估”过程的一体化,提高命中精度并增强杀伤力,并带动周边形成体系作战能力。
4.2 多平台多传感器协同探测技术
(1)编队协同探测总体技术。研究编队协同探测总体技术,分析无人平台挂载的声、光电、红外等多种传感器或小型雷达实施编队协同探测的方式方法。研究不同无人平台配备不同的探测任务模块的匹配方法[17],研究协同探测编队的航线规划方法,使群体间通过资源共享弥补单平台能力的不足,扩大任务执行范围,通过合理规划探测资源和路径,以缩短作业时间,覆盖更大的工作区域。通过多平台组成分布式、可灵活快速布放的空地探测网络,实现多角度、多方位提高远程目标探测概率与精度。
(2)多传感器复合跟踪技术。研究多传感器复合跟踪技术,提高组网无人平台分布式光电吊舱或雷达传感器的系统综合检测概率。研究在相关无人平台和指控节点处理设备中统一部署复合跟踪算法,进行目标复合航迹管理,每个节点将自身传感器的检测结果与其他协同作战单元的检测结果融合处理、综合建批、合理使用、形成闭环,使各作战平台获得高精度的统一战斗态势。
4.3 高动态分布式自组网管理技术
(1)网络拓扑结构动态管理。为了满足系统抗摧毁、抗干扰及高机动作战平台需求,编队协同作战系统的网络结构应具有分布式、无中心等特点,各作战节点通过分布式算法协调进行通信资源的调度管理,网络拓扑结构的组织管理需采用自适应、动态管理的方法。因此,动态网络管理技术的研究包括能量保护、移动管理、拓扑控制、路由协议等多个相应的基础技术环节与系统动态背景的关联关系。
(2)协同信息资源传输分发。在有限通信带宽资源等条件下,编队中多个协同作战节点动态入网、交互协同数据时,会加大节点间的数据传输流量,节点处理外部到达消息的频率也随之剧增,对网络带宽、处理能力和可扩展性都提出了进一步的要求。因此,在拓扑结构、动态路由管理的基础上,必须考虑解决数据信息发送造成的系统资源需求急剧上升的问题,进一步从数据传输分发和信息管理调度的角度进行设计改进,通过在业务层面的具体优化,实现传输分发质量和效率的大幅度提高。
4.4 编队无人系统时空一致技术
(1)区域高精度低时延时间同步。编队无人平台协同作战系统在区域分布式、自组织动态拓扑条件下,面临网络结构快速变化、作战节点频繁移动、多跳时延误差累积等问题,影响节点间通信链路稳定性的同时,在同步过程中数据分发的分组碰撞率及丢包率也将显著增大,因此需要深入研究解决自组织、多跳、动态拓扑条件下的高精度、低时延时间同步方法。
(2)基于运动平台感知的空间配准。空间一致性配准方面,围绕编队无人平台协同作战系统在动平台、动目标方面的显著特点,有针对性地研究基于运动平台的传感器、火力任务载荷空间误差在线估计和补偿方法。首先研究利用无人机、无人车等合作目标的已知位置,把目标状态与传感器偏差进行解耦估计,将载体平台姿态角偏差转换为传感器测量偏差中的一部分,并建立传感器极坐标测量系中各坐标轴的偏差解耦模型。在此基础上,利用广义最小二乘等具体算法进行平台载体的姿态偏差和测量偏差等实时估计。进一步利用目标量测的时空耦合机理,在传统异步空间配准的基础上,按照内插外推算法的时间配准机制,先完成各传感器量测的数据对齐,然后根据时间配准结果建立与目标运动状态无关的空间配准伪量测方程,从而通过耦合、解耦、再耦合的思路,有效解决平台运动、目标机动条件下的异步空间配准问题。
4.5 编队无人系统误差链分析补偿技术
在明确系统误差链与精度控制机理的基础上,综合应用多种技术手段,进一步研究解决无人平台典型传感器与武器载荷的误差修正与精度控制问题。重点研究网络条件下无人平台制导武器系统的误差修正技术,分析武器系统对网络化制导信息的精度、数据率、实时性等要求,通过研究制导信息误差建模、误差修正与精度补偿控制等问题,有效降低网络条件下多平台跟踪制导过程中,影响跨平台跟踪制导火力控制数据传输分发与处理质量的各种系统误差与随机误差,满足制导武器指令修正、中制导等网络化制导模式对弹目相对误差精度的要求。
5 结束语
智能战争时代正在加速到来,美国、俄罗斯等战斗机器人部队组建、无人作战装备研制及世界局部战争冲突中展现的战术战法正对现代作战模式产生深远影响。未来,陆战分队在中小规模近距作战和反恐特种作战模式的转变值得高度关注。陆战分队空地一体无人作战系统应更加注重无人平台兼容性、任务载荷多样性、信息火力一体化时效性,加大指挥控制与有人和无人平台交联深度,重视编队集群控制和低成本精确打击武器的运用,逐渐形成体系化发展趋势。
