面向典型任务的有人/无人机协同效能评估
2021-04-17侯婷婷李东光
尹 昊,侯婷婷,李东光
(北京理工大学机电动态控制重点实验室,北京 100081)
1 引 言
目前,无人机(Unmanned Aerial Vehicle, UAV)在作战中的应用越来越广泛,可以携带多种传感器设备、执行多样的命令[1],但单架无人机往往难以完成某些复杂、多需求的任务,只能起到锦上添花的作用。受多方面性能的约束,无人机的作战能力与有人战机(Manned Aerial Vehicle, MAV)尚存在较大的差距,例如存在对卫星强依赖性、与远端指控中心通信不稳定性、对战场动态变化感知弱敏感性等突出问题。因此,在未来战争中,无人机与有人战机的密切协同配合、优势能力互补将直接影响战场的态势,其协同运用方式也在发展中不断发生改变,有人/无人机协同作战在短期战场时空下势必将成为一种常态[2]。
目前美军主要利用有人直升机“阿帕奇”和无人机MQ-5B、RQ-7 等进行混合编队功能需求定义、协同控制技术分析和实验验证[3-4]。法国也将“阵风”飞机改装成无人机的控制机[5],并且成功完成了“神经元”无人机与“阵风”有人战机共同飞行的实验,考虑了无人机的协调问题,制定了未来无人机的战技要求。
对于有人/无人机协同作战模式及效能的研究在国内初见萌芽,多数将协同作战模式当成作战流程、作战样式进行讨论,协同效能的研究仅仅停留在验证的设计阶段。例如王焱[6]提出有人/无人机的协同作战模式有态势感知、协同攻击和协同防御三种,并进行了简略的介绍,但并未提出使用规则;刘纪文等人[7]研究了有人/无人机协同作战的关键技术,提出主要包括协同态势评估、交互控制、目标分配等技术,并进行了详细的分析,为日后的理论研究和实验打下基础;闫晔[8]针对有人/无人机协同中的交互技术进行了研究,提出采用自然语言理解及相关技术对无人机进行任务控制,并通过实验证明其设计的自然语言模块能够帮助无人机对简单的任务指令进行了解;姜禹呈等人[9]建立了有人/无人机协同作战的网络拓扑模型,提出运用社团化算法解决超网络模型的设计难点,使得此网络模型更适合于评估系统的协同效果。
在协同系统效能评估方面已经有一些成熟的方法,例如龚喜盈等人[10]在用于评估普通战斗机效能的对数法的基础上,建立了一种适应性很强的评估无人机综合性能的模型;阴小晖[11]通过层次分析法确定指标的权重,利用层次分析法-模糊综合评判法评估性能指标、通过计算证明了方法的科学性和合理性,为有人/无人机协同作战的系统效能的评估提供了研究思路;张永利等人[12]采用层次分析法建立了有人/无人机协同作战指标体系,并用仿真软件进行了进一步的说明和计算,其研究结果对有人战机和无人机的资源分配具有一定的参考价值。
国内外针对有人/无人机协同作战已展开了大量的研究,同时也存在着巨大挑战,例如多个学科的交叉问题、有人/无人机协同模型的复杂性、大规模优化算法和随机事件[13]。有人/无人机协同作战效能评估是协同作战领域的热点问题,但多数都只是在概念层面予以解释,研究有人/无人机协同作战,首先要分析有人/无人机协同作战系统组成与协同样式,包括应用场景与控制架构,剖析协同作战模式的本质;其次在可量化的系统功能能力基础之上,建立作战效能评估体系,通过验证模型的合理性和可靠性来更好地了解与预测有人/无人机协同作战的作战效果,同时也有助于武器装备的快速发展。
2 有人/无人机协同模式
有人/无人机协同作战系统主要由四个子系统组成,分别是地面指挥控制中心、有人战机、无人机和通信链路系统。指挥中心、无人机、有人战机通过通信链路传输共享情报、态势、指挥控制这三类信息;地面指挥控制中心指挥混合编队,有人战机指挥控制无人机,通过通信链路实现三者之间的协同;有人战机主要负责决策和任务分配,无人机完成侦察、监视,目标探测与攻击等任务。
2.1 协同侦察探测
单架有人战机与多架无人机组成混合编队对某区域执行侦察任务,可以提高跟踪质量,实时向指挥控制系统反馈目标未被分配、未处在被跟踪的状态,或是目标不在视场内导致无法跟踪的情况,从而提高有人/无人机协同系统的态势感知能力。在无人机执行任务过程中,由于目标的初始位置未知,以及侦察区域存在威胁因素,因此目标的侦察过程十分复杂,甚至当任务区域过大,需要侦察的目标过多时,多无人机受飞行速度限制不一定能够在规定的时间内完成任务;在特殊侦察情况下,多无人机在威胁区域侦察时,遇到威胁需要避开,很容易丢失目标,为了防止丢失目标,无人机可以选择与有人战机进行任务协同;多无人机通常在比较危险的环境下执行任务,很可能会出现故障或者被敌方击落,此时,利用有人战机机动决策,确保侦察任务的有效性;受搭载重量和种类的限制,无人机的机载传感器探测范围有限,不一定能够满足对各个目标的侦察需求,不同性能的目标需要不同性能的传感器来探测,此时利用有人/无人机协同决策分配,达到任务完成的要求。由此可见,仅依靠无人机所能发挥的侦察效能比较有限,组织多架有人/无人机编队协同执行侦察任务是未来战场上一种重要的军事行动方式,如图1 所示。

图1 有人/无人机协同侦察Fig.1 Manned/Unmanned Aerial Vehicle cooperative reconnaissance
2.2 协同目标打击
协同目标打击主要分为对空目标打击和对地目标打击两种方式。
对空目标打击(图2):由一架有人战机和两架无人机编队进行空中目标的打击,无人机位于有人战机前方,雷达只接收信号不发射电磁波,与此同时迅速接近目标,当目标进入无人机的火力杀伤范围内,位于后方的有人战机开始进行探测,并将目标的信息实时发送给无人机,并启动无人机武器发射指令,随后接替无人机进行制导,完成对敌方战机的打击。
对地目标打击(图3):有人战机指挥控制多架无人机共同打击地面目标。每架无人机均携带多种传感器和不同类型的对地攻击武器,如空地导弹、炸弹、机炮等,从而使各个无人机携带的载荷降低。各种类型的飞机密切协同,听从有人战机的指令,对地面目标进行打击。

图2 对空目标攻击任务Fig.2 Attack mission on air targets
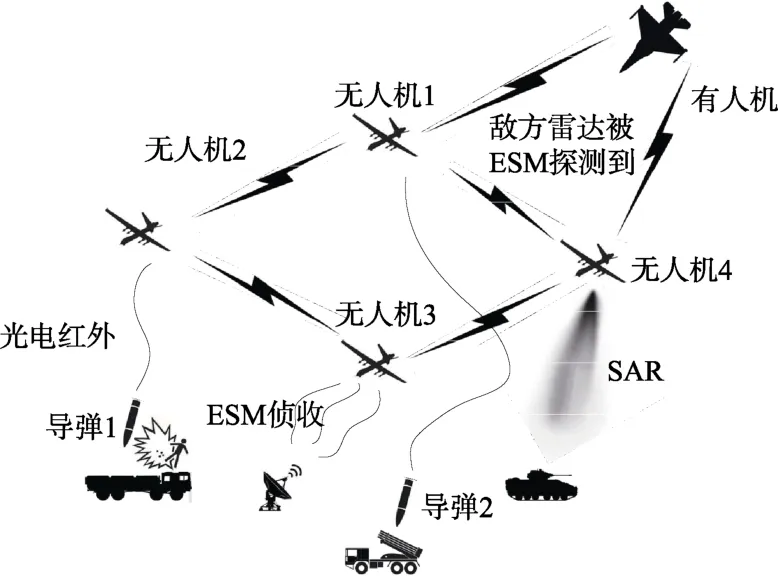
图3 对地面目标攻击任务Fig.3 Attack mission on ground targets
2.3 有人/无人机协同运用规则
随着人类信息化和智能化技术的快速进步与广泛应用,现代战争形式和战场环境发生了深远的变化,有人/无人机协同作战的模式已经逐渐应用于战争领域中多种任务的执行,极大地延伸了现代战场的时间轴和空间轴。但有人/无人机协同作战中自主性的发挥程度和规则是军事领域专家或学者持续关注的问题,尤其是人在智能化战争中的定位,该扮演怎样的角色,也逐渐成为人与智能化机器协同作战领域中研究的热点。
国内外现有研究学者对“自主性”的概念定义也不尽相同[14-15],总的来说是在无人参与的过程中,处于随机复杂情况条件下的无人机不间断完成动作的能力。在混合编队协同作战指控关系中,无人机更多地应用在已确定的任务中,而操作员很少直接参与对控制系统的操作,主要是处理高层次的规划、决策等。根据有人作战飞机飞行员对无人机控制程度的差别,可将其自主等级划归为以下10 个,同时对其中的某些相似级别进行了合并[16],如表1 所示。

表1 Parasuraman 的无人机自主等级划分Table 1 Parasuraman's classification of UAV autonomy
由表1 可知,无人机受到有人作战飞机操作员的完全控制是可靠性最高的控制方式,但势必给操作员身体及心理造成极大的伤害;而人不在回路的控制,很可能会导致无人机完全自主根据规则去执行任务,此种作战现象所造成的代价是无法估量的。通过对现代智能化程度发展状态的分析,可定义有人/无人机协同作战中操作员与飞机之间交互的内容、方式,如表2 所示。

表2 有人机与无人机之间交互的内容及方式Table 2 Content and mode of interaction between MAV and UAV
根据对现代战争形势的衡量,研究判定:在未来战场很长的一段时间内,考虑有人控制操作员所面临的巨大压力以及无人控制下的不可估量的代价,有人/无人机协同作战研究常规应采用的监督控制模式为同意管理模式。
但根据现代战争中无人机使用情况,并结合本文对有人/无人机协同模式的研究,本文设计了一种适用于指令控制模式的有人/无人机协同作战系统的控制架构,如图4 所示。
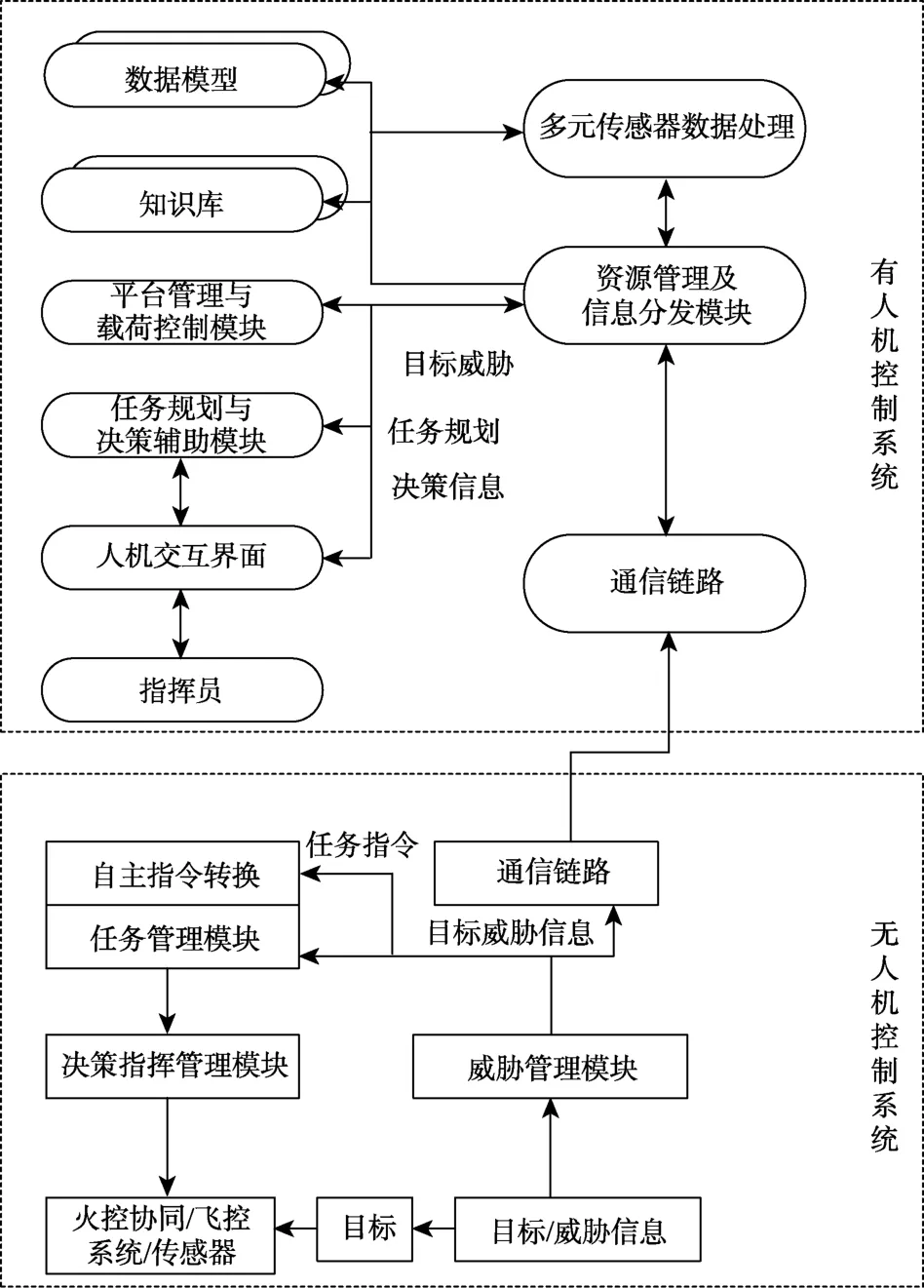
图4 有人/无人机协同作战系统的控制架构Fig.4 Control architecture of MAV/ UAV cooperative operation system
无人机的控制模块主要包括任务管理、决策指挥管理、威胁管理,无人机向指挥员提供目标、威胁信息,指挥员向无人机发布任务指令,体现了在现代战争中人依然要处于最终决策的重要位置,“人在回路”可充分将人机智能运用在实际作战中,将高层次的决策交还于人是有人/无人机协同作战的核心原则。
3 有人/无人机协同作战效能评估
3.1 协同系统效能模型
基于空战理论和作战任务,构建有人/无人机协同作战效能评估指标体系层次,如图5 所示。其中包括三个层次:整体效能层、系统能力层、指标层,下层详细描述了上层分系统的各种能力。
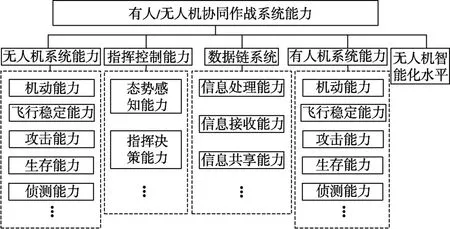
图5 有人/无人机协同作战效能评估指标体系Fig.5 Effectiveness evaluation system of MAV/UAV cooperative operation
本文评估有人/无人机协同作战系统效能主要是将其与纯无人机协同的作战效能进行对比,优选不同任务下的编队组合,系统评价结果均是相对关系,主客观因素定性综合评价,无需精确标准化来计算作战飞机的效能。
对有人/无人机协同作战系统来说,根据其典型协同作战的特点,指挥控制能力、无人机智能程度和数据链能力是耦合关系,有人战机的主要任务是辅助攻击,故有人战机能力与无人机能力权重采用统计相关性分析计算设定[17],单机作战能力与其他能力无关,由此建立有人/无人机系统的协同作战数学模型S为
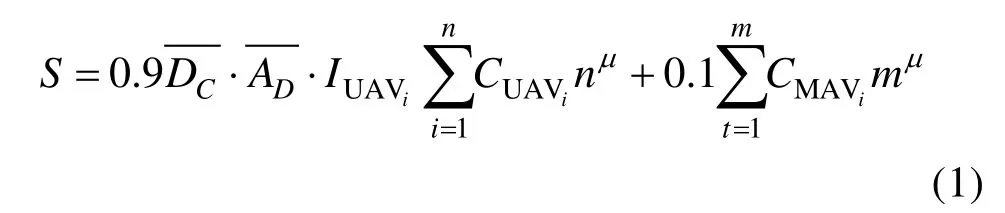
其中,DC为系统数据链能力,AD为有人战机指挥决策能力,IUAVi为第i架无人机智能水平,CUAVi、CMAVi分别为第i架无人机、有人战机的单机效能,n,m为无人机和有人战机架数。由于协同作战会降低单机能力优势,μ表示飞机总数对单机效能的影响系数,根据专家经验,μ与飞机架数的关系如表3 所示。

表3 飞机总数对单机效能的影响Table 3 Effect of total number of aircraft on efficiency of a single aircraft
各分项能力指数上方的“—”是标准化处理后的数值,此时各指标数值都处于0 到1 之间,能够使得数据之间差异较小,有相对一致性。目前数据标准化处理方法有多种,可分为直线型方法、折线型方法、曲线型方法。考虑各种性能参数的物理意义,本文采用非线性S 型可导函数归一法[16],该方法能够突出指标的饱和特性。

其中,f(x)的取值范围在0-1 之间,某个指标的不断增大不会使评估的结果无限增大,α β、 为调节曲线的参数。
根据S 型可导函数,对于数值越大越好的项,归一化准则为
其中,Ai是处理后的值,Ai是输入的原始数据;Aimax为每类指标数据的最大值,Aimin是每类指标数据的最小值(对于数值越小性能越优的指标,采用Aimax-Aimin作为分母)。
(1)根据有人/无人机系统各分能力模型,参考数据链支撑能力评估方法[18],系统的数据链能力的数学模型如下:

其中,MR为信息接收能力;MD为信息处理能力;MS为信息共享能力。

其中,ED为有效的数据率,pt为单位信息传播所需的时间,maxD为能达到的最大数据率,ct为单位接收信息的时隙的持续时间,LD为损失的数据率。
其中,qi是度量传递第i条信息时效性的量,n为传递信息的总数。
其中,rM代表各分系统接收的信息,sn代表发送信息的各分系统数目,rn代表接收信息的各分系统数目,sM为各分系统发送的信息。
(2)系统的指挥控制决策能力的数学模型如下:

其中,0/U U代表信息的完备性;1iE- 代表感知的精确度,iE代表感知到的目标特征与实际目标特征之间的偏差程度,iq是信息处理融合的时效性指标;maxt为决策可用最长时间,jt为做出单个决策所用的时间,jα为从第i个决策行动实施后任务的实际完成程度;其能力权重参考在役考核体系架构[19]。
IUAV是依据美国相关研究单位定义的自主控制10 个等级计算出来的[20]。
其中,U/U0代表信息的完备性,U和U0分别表示正确的目标数量和客观存在的目标数量,(1-Ei)代表感知的精确度,Ei代表感知到的目标特征与实际目标特征之间的偏差程度,qi是信息处理融合的时效性指标。
其中,maxt为决策可用最长时间,jt为做出单个决策所用的时间,jα为从第i个决策行动实施后任务的实际完成程度。
3.2 单机效能模型
根据单机的效能指标,构建飞机作战能力的数学模型:

其中,CA为攻击能力,Ct为机动能力,Cs为生存能力,I为侦测能力,CR为飞行稳定能力,ω1,ω2,ω3,ω4,ω5为各分能力的权重,效能评估仅考虑飞机作战能力,因而将环境影响因子、系统可靠性等外界因素忽略。受篇幅所限,飞机各分能力数学模型给出简略说明,各能力模型及其系数均为研究成果表达[21-22]。
(1)机动能力Ct:相关参数包括飞机平飞的最大单位重量剩余功率SEP,最大的瞬时转弯角速度ωmax,最大推重比(飞机的最大加力推力与飞机起飞重量的比值)Tm,max,最大稳定盘旋过载Nmax,计算公式如下:

(2)攻击能力CA的相关变量有:载弹量W、发射武器的距离L、发现目标能力Det(取值准则参考文献[18])、武器的挂载数量n和武器精度系数Cc(取值准则参考文献[18]),计算公式为

(3)生存能力模型仅考虑其自身参数,以下为其数学模型:

其中,w代表飞机全长,RCS 为雷达反射截面积,l代表翼展。
(4)侦测能力模型分为目标侦察能力和目标识别能力。
目标侦察能力:装备高性能雷达的无人机可配合有人战机进行联合侦察,延伸作战半径,飞机雷达扫描波成扇形,则探测领域为

其中,θA为扫描波仰角;rmax指雷达扫描波的最远传播距离。
扫描频率:

其中,Ts为扫描周期,最终目标侦察能力为(ρ1、ρ2为比例系数):

目标识别能力:目标发现概率越高,越容易抓住作战时机,进而掌握制空权。因而,高分辨率的雷达是目标识别的重要设备,本文用雷达分辨率来表示目标识别能力。
雷达分辨率的计算公式为
其中,d为天线孔径,k是单位距离的采样次数,nβ为方位角测量误差加权系数,Td是波束在任务方向上停留的时间,θ∝为空间方位角,β指信号带宽,R0是雷达识别能力的参考距离。
比幅测角的计算公式为

根据战场实际情况给目标侦测、识别能力取不同权重ε1,ε2,得到侦测能力指标模型为

(5)飞行稳定能力CR:相关参数包括作战半径R,飞机升限H,最大平飞马赫数Vmax以及巡航马赫数Vs,计算公式如下:

飞机的作战效能评估模型采用层次分析法建立,根据不同作战任务的需求,采用专家打分法,构建各层次的判断矩阵,并通过一致性检验,得到飞机单机效能的各项能力权重如表4 所示。
表4 飞机单机效能的各项能力权重Table 4 Each capability weight of single aircraft efficiency
4 仿真结果及分析
4.1 试验想定说明
针对有人/无人机协同作战模式作战流程中最重要的两个任务环节——协同侦察探测任务和协同目标打击任务提出了两个作战想定。有人/无人机协同应用场景及作战元素如表5 所示。
表5 有人/无人机协同应用场景说明Table 5 Background description of MAV/ UAV cooperative operation
以美军典型侦察打击一体无人机RQ/MQ–1A(无人机A)、MQ–9(无人机B)和典型战斗机F–16(F)的基本数据为参考,仿真过程采用北京华如科技股份有限公司的Xsim Studio 可扩展仿真平台(简称Xsim)进行作战效能评估,如图6 所示。
Xsim 仿真平台为国内知名权威的协同作战与效能评估的仿真系统,根据其可靠的仿真评估结果与理论计算整体效能以及各项分能力并对数据进行归一化处理结果对比[23-26],可定性验证理论评估模型与方法的准确性。
4.2 试验结果分析
只考虑一种型号的有人战机参与编队的情况下,认为混合编队的指挥决策能力基本无变化,但高于无人机编队的指挥决策能力。以A、B、F代指“捕食者”无人机、“死神”无人机和战斗机F–16,则基于具体任务有人/无人机协同作战系统的飞机综合能力理论评估如表6 所示。

图6 协同侦察/打击任务作战想定Fig.6 Cooperative reconnaissance/attack mission combat scenarios
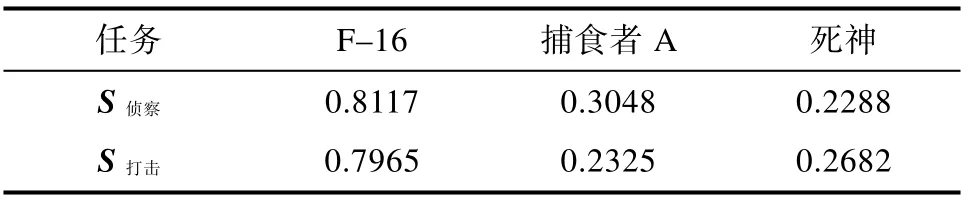
表6 飞机综合能力评估结果Table 6 Aircraft comprehensive capability assessment results
仿真试验选取Xsim Studio 评估任务的方案事后评估分析,将作战想定进行100 次仿真后得到的所有数据计入仿真评估系统中,主要包括武器发射态势信息、实体毁伤态势信息、实体信息等,可以得到协同侦察与打击的多方案样本评估对比结果,如表7 所示。
由表7 理论与仿真评估结果可知,理论效能评估与仿真效能评估结果相吻合,即在协同侦察探测任务中,一架F–16 带领两架无人机A 编队(1F2A)的作战效能最高;一架F–16 带领两架无人机B 的编队(1F2B)进行协同打击效能最高。同时,其余几种组合方式的协同打击效能、协同侦察效能的大小排序也一致,由此验证了效能评估模型的相对可靠性和可用性。
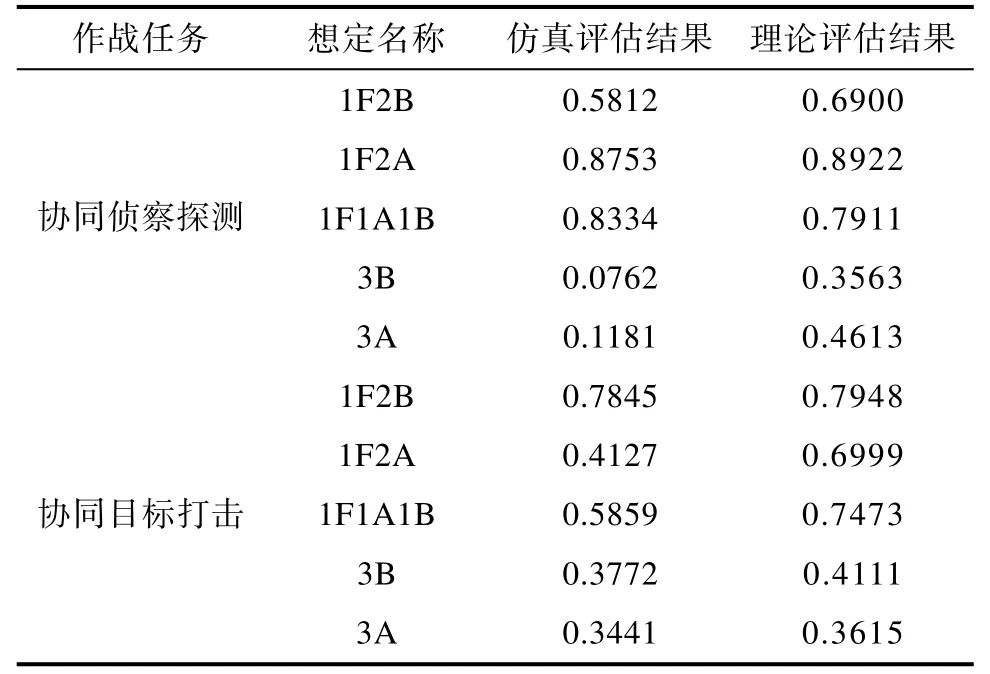
表7 有人/无人机协同作战多方案样本评估对比Table 7 Comparison of multi-program sample on MAV/ UAV cooperative operation
5 结 论
本文以有人/无人机协同执行作战相关任务为背景,对其效能评估的指标体系和模型进行了深入的研究,将两种典型作战任务想定下在高可信度的仿真软件中推演,并分析了仿真结果。
(1)分析有人/无人机协同的作战模式,包括典型的作战任务、作战流程和作战样式,以此提出了有人/无人机协同作战的使用规则。
(2)构建了一种有人/无人机协同作战系统的效能评估指标体系并建立了综合指数模型,对有人/无人机混合编队组合方式进行了优化。
(3)提出了协同侦察、协同打击的作战想定,对100 次仿真的数据进行分析处理,评估系统作战效能,与理论结果对比,对效能评估模型的合理性进行验证。
未来在对有人战机和无人机进行组合编队时,可预先对不同类型的无人机进行单机效能的评估,基于不同的协同样式,选择最优的编队组合方式。现阶段有人战机的性能在很多方面都优于无人机,有人/无人机协同作战中可以由指挥员根据战场态势做出临机决策。
有人/无人机协同作战是未来空中作战的主要方式之一,涉及多个方面的复杂问题,本文仅对其中某些重点问题进行了研究,忽略了其中一些实际因素。进一步的研究考虑在效能评估中加入飞机可用度、可靠性、效费比等多种因素,完善评估方法,并进行半实物仿真试验,以实际数据为模型提供支撑,可使评估结果更具有真实可靠性。
