无人车用智能导航技术国际态势分析
2021-04-17薛连莉翟峻仪李一鸣
薛连莉,翟峻仪,李一鸣
(1.北京海鹰科技情报研究所,北京 100074;2.航天科工空间工程发展有限公司,北京 100093)
1 引 言
从古至今,作战的方式都在不断发展变化,从使用冷兵器和热兵器的古代,再到21 世纪的信息化、现代化战争,无论何种战争形式,降低战争的伤亡率都是从始至终追求的目标之一[1]。以无人车、无人水面艇和无人机等为代表的无人系统具有风险小、代价低、环境适应能力强、非接触、无人伤亡、自主可控、长续航、可成组编队、功能多等优点,在军事及国民经济生活中得到了广泛应用。目前,美、以、英、俄等国的陆军已形成了初步的地面无人体系,并借助长期的技术积累和信息技术优势,不断拓宽地面无人系统的任务功能领域,推动地面无人系统的发展[2-4]。而随着无人车的不断发展,其智能化程度不断提升,对导航技术的依赖程度也越来越高。导航可分为自主导航和非自主导航。自主导航是指运动载体完全依靠自身所携带的设备,自主地完成导航任务,不与外界发生任何声、光、电信息交互[5]。其中,惯性导航利用惯性传感器测量载体运动信息,短期精度高,自主性较强,隐蔽性较好,是一种典型的自主导航技术。而无人系统的特点就是没有人参与系统回路,且工作环境复杂[6]。因此,基于惯性导航的智能导航技术是无人车的理想选择。
本文将根据1990—2020年“无人车用智能导航技术”相关的研究与综述论文、专利发表情况,对该专业技术领域进行总体分析。针对论文发表情况,主要对其发展趋势、国家/地区分布、机构分布、出版物分布、高被引论文、被引频次和研究主题进行深入分析;针对专利申请现状,主要对专利申请时间、国家/地区分布、专利权人、专利研发技术热点等进行深入分析。
2 研究前沿态势分析
为检索出与“无人车用智能导航技术”相关的研究与综述论文,根据研究主题,构建检索策略①检索策略:TS=((unmanned vehicle OR unmanned ground vehicle OR 无人车OR 无人地面车辆OR Autonomous Vehicle OR 自主车辆) AND (导航OR navigation OR GPS denied OR GPS rejection OR GPS reject OR inertial OR gyro OR accelerometer OR 惯性OR 陀螺OR加速度计)),索引=SCI-EXPANDED,CPCI-S,时间跨度=1990—2020,在ISI Web of Science-SCI/CPCI 数据库中,共获得4073 篇论文(检索时间截止到2020年6月16日)。
2.1 研究产出基本情况分析
2.1.1 研究趋势分析
图1 所示为无人车用智能导航技术研究领域的SCI/CPCI 论文发表趋势,由图可见,1990— 1991年,没有相关研究领域的发文;1992—2003年,该领域的发文量缓慢增长;2004—2012年,该领域的发文量持续快速增长;2013年以后,该 领域发文量呈现了爆发式增长,2018年发文量达到了历年最高值496 篇。需要注意的是,由于数据库收录的原因,2020年的数据不作为参考。
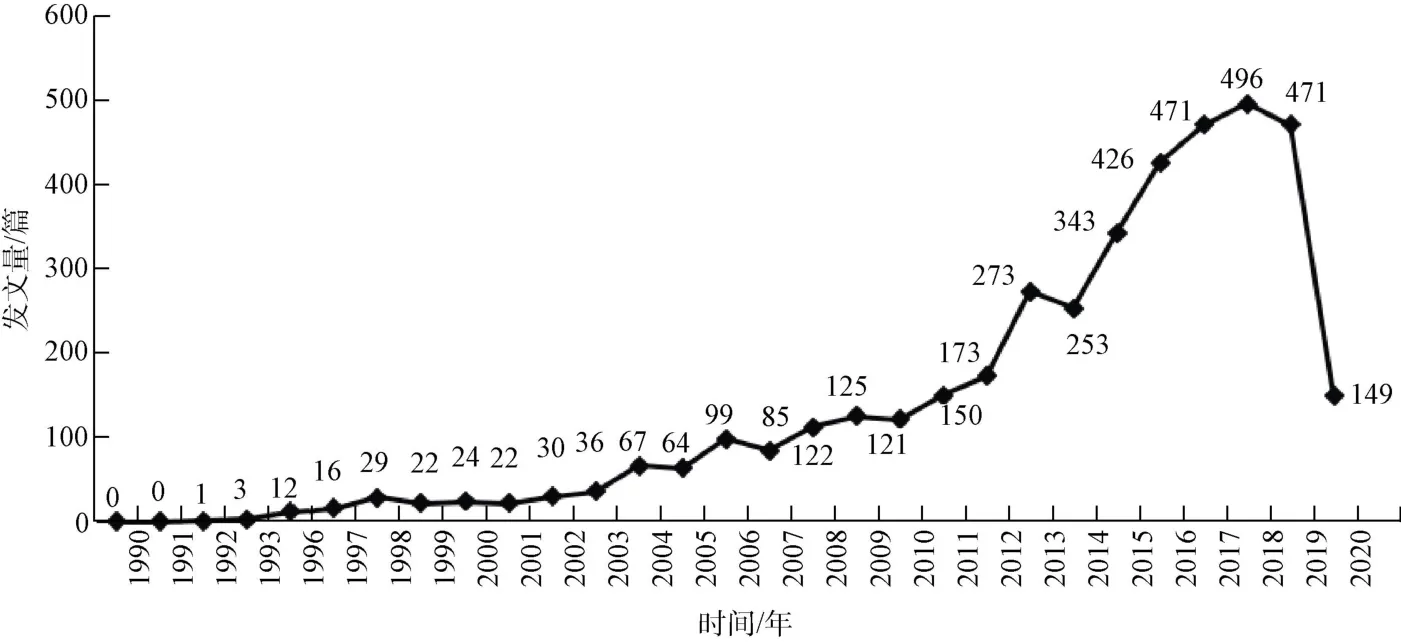
图1 无人车用智能导航技术研究论文年代分布Fig.1 The distribution of papers in intelligent navigation technology for unmanned vehicles
2.1.2 国家(地区)分布
图2 为发文量排名前20 的无人车用智能导航技术研究领域论文发布国家/地区情况,由图可见,美国的发文量最多,为1029 篇,排名第二的中国发文量为856 篇。相比中国和美国,其他国家在该领域的发文量较少。由图可见,美国和中国在无人车用智能导航技术研究领域研究规模很大,在全球范围内占据相对领先优势。
2.1.3 全球机构分布
在无人车用智能导航技术研究领域发文量排名前三的机构都是中国的,分别是北京航空航天大学(89 篇)、中国科学院(63 篇)和国防科技大学(57 篇);排名前五的机构中,有4 家来自 中国;在发文量排名前20 的机构中,中国有10家,美国和新加坡各2 家,英国、韩国、澳大利亚、加拿大、意大利和乌克兰各1 家,分布情况如表1 所示。
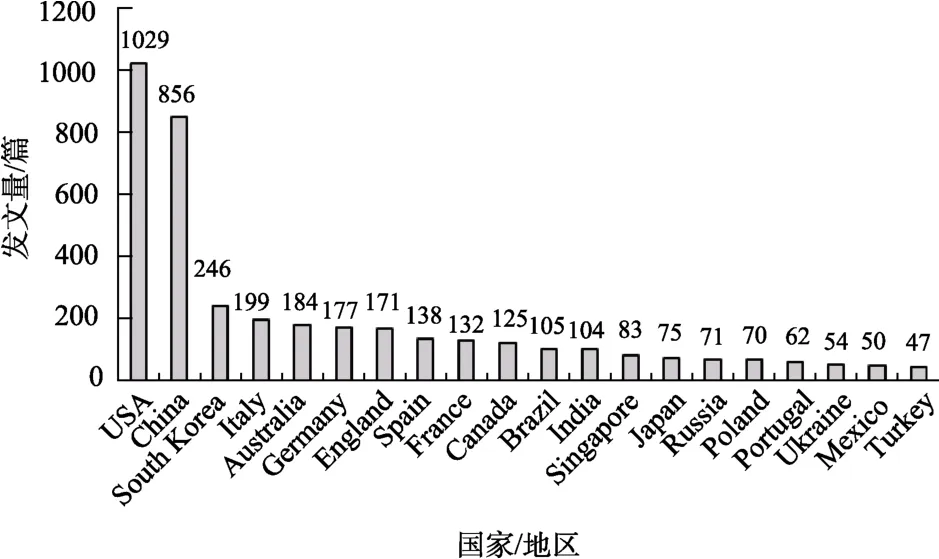
图2 无人车用智能导航技术研究论文国家/地区分布Fig.2 The distribution of papers on intelligent navigation technology for unmanned vehicles by country/region

表1 无人车用智能导航技术研究论文全球研究机构分布情况Table 1 The distribution of global research institutions in intelligent navigation technology papers for unmanned vehicles
2.1.4 出版分布
如表2 所示,发表无人车用智能导航技术研究领域文献最多的出版物为美国国际光学工程学会的会议论文,发文量为208 篇;发文量排名第二的为Sensors 期刊,该期刊的最新影响因子为3.096,截至2020年6月16日,该期刊共发表143 篇无人车用智能导航技术研究领域的文献。在发文量排名前20 的出版物中,会议为11 个,期刊为9 个,会议和期刊的发文量分别为688 篇和601 篇,两者数量相当。
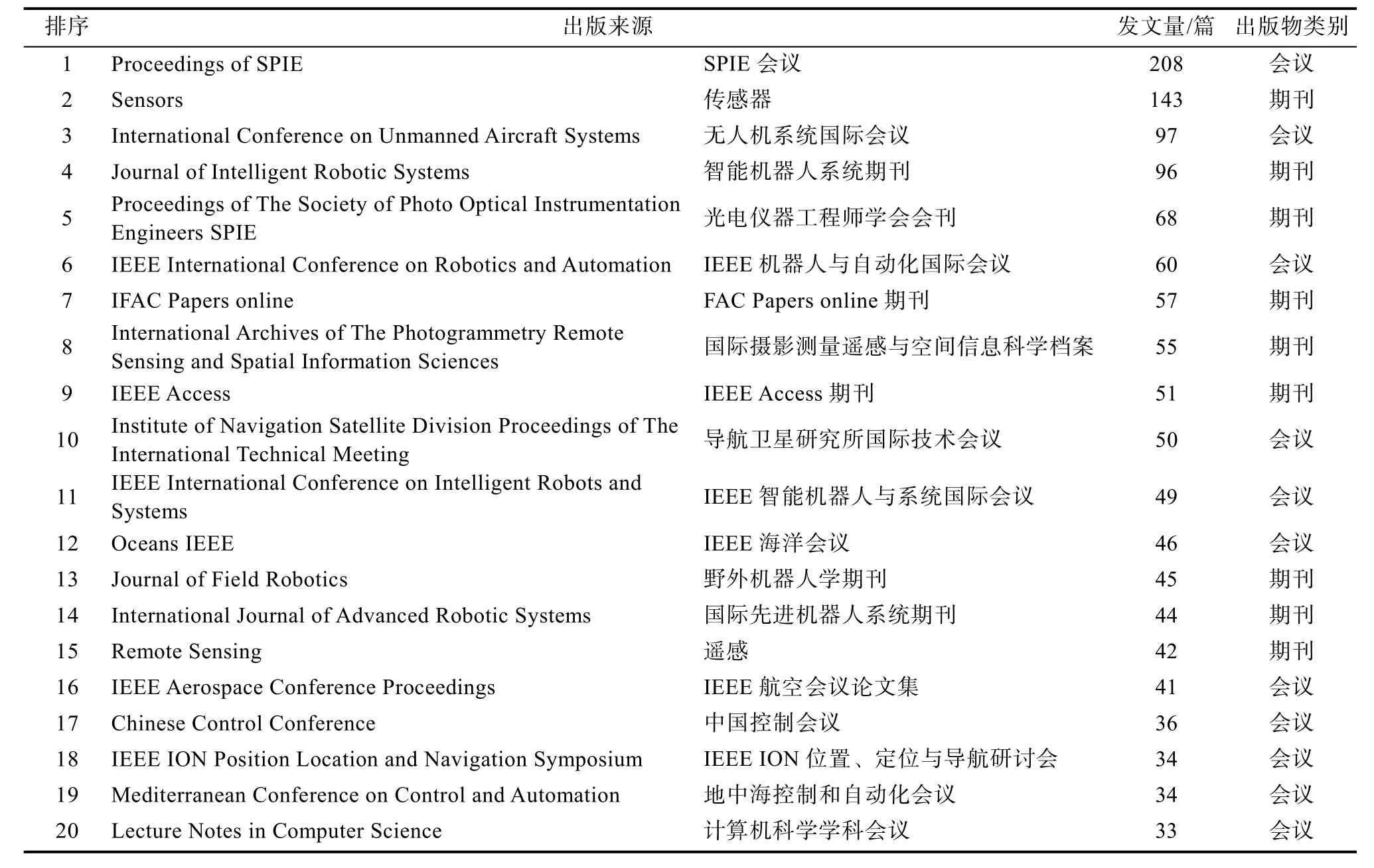
表2 无人车用智能导航技术研究论文出版分布情况Table 2 The distribution of papers in intelligent navigation technology for unmanned vehicles
2.1.5 高被引论文
表3 所示为无人车用智能导航技术研究领域论文被引次数。排名前10 的文章中,被引频次最高的是美国卡内基·梅隆大学的学者Balch 等人于1998年发表在IEEE Transactions on Robotics and Automation 上的一篇文章, 文章题名为《Behavior-based formation control for multirobot teams 》。在排名前10 的高被引文章中,美国有3篇,澳大利亚有2 篇,瑞士、加拿大、德国、北爱尔兰、意大利各有1 篇。值得注意的是,中国机构尽管在发文量方面占据相对优势,但在高被引论文中无一入选。
2.2 国家/地区被引频次分析
表4 为无人车用智能导航技术研究领域国家/地区的论文被引情况。由表中可见,中国的发文总量、总被引频次和篇均被引频次均占据全球领先地位。美国的发文总量为1029,排名第一;总被引频次4812,排名第二;篇均被引频次为4.68,排名第16。值得注意的是,加拿大篇均被引频次高达8.02,说明加拿大在无人车用智能导航技术研究领域处于较高水平。
2.3 研究主题分析
表5 所示为无人车用智能导航技术研究领域的主要研究方向分类。研究方向主要集中在电气电子、自动化控制系统、机器人技术、计算机科学人工智能、航空航天、遥感、电信、仪器仪表等类目。其中,工程电气电子类排名第一,发文量高达1642 篇,占总发文量的40%以上;自动化控制系统类排名第二,发文量为906 篇;机器人技术类排名第三,发文量为856 篇。
2.4 小 结
1990—2003年,无人车用智能导航技术研究领域的发文量缓慢增长;2003年以后,该领域的发文量持续快速地增长;2013年以后爆发式增长;2018年发文量达到了历年最高值。
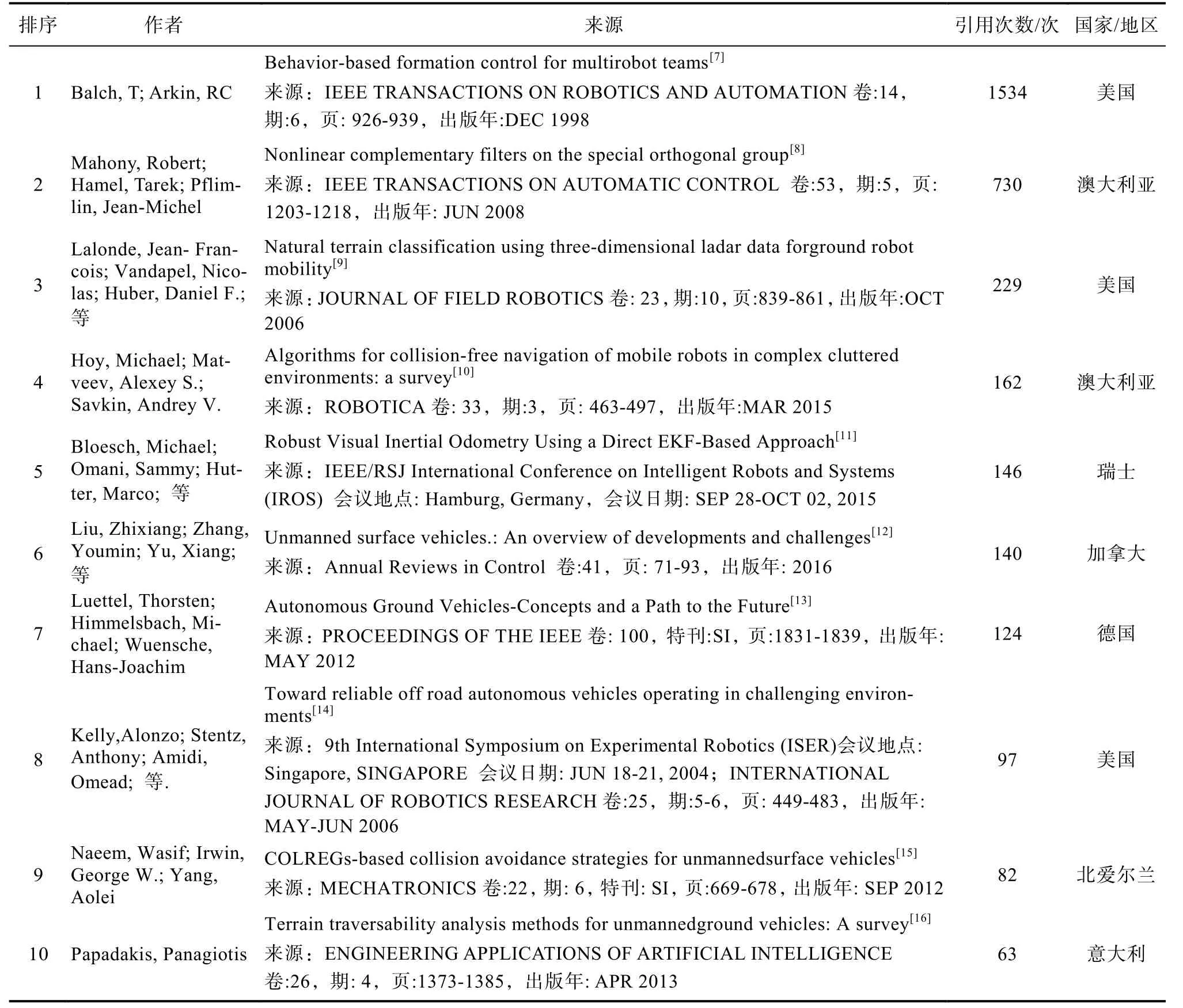
表3 无人车用智能导航技术研究高被引论文Table 3 The highly cited papers in intelligent navigation technology for unmanned vehicles
美国和中国在无人车用智能导航技术领域研究规模很大,在全球范围内占据相对领先优势。排名第三的韩国发文量仅为中国的30%,美国的25%。
在无人车用智能导航技术研究领域发文量排名前20 的机构中,有50%都来自中国,其中北京航空航天大学、中国科学院和国防科技大学分别以89 篇、63 篇和57 篇的发文量占据榜单的前三。除中国外,在发文量排名前20 的机构中,美国和新加坡各2 家,英国、韩国、澳大利亚、加拿大、意大利和乌克兰各1 家。
发表无人车用智能导航技术研究领域文献最多的出版物为美国国际光学工程学会的会议论文,发文量为 208 篇;发文量排名第二的为Sensors 期刊,发文量为143 篇。在发文量排名前20 的出版物中,会议为11 个,期刊为9 个,会议和期刊的发文量分别为688 篇和601 篇,两者数量相当。
美国在该领域的研究水平全球领先。被引频次最高的是卡内基·梅隆大学的学者Balch 等人于1998年发表在IEEE Transactions on Robotics and Automation 上的一篇论文,题名为《Behavior- based formation control for multirobot teams 》。在排名前十的高被引文章中,美国有3 篇,澳大利亚2 篇,瑞士、加拿大、德国、北爱尔兰、意大利各1 篇。中国机构尽管在发文量方面占据相对优势,但在高被引论文中无一入选。

表4 无人车用智能导航技术研究论文国家/地区被引情况Table 4 The citations of papers in intelligent navigation technology for unmanned vehicles by countries/regions

表5 无人车用智能导航技术研究方向分布情况Table 5 The distribution of research directions in intelligent navigation technology for unmanned vehicles
美国的发文总量排名第一,总被引频次排名第二,但篇均被引频次排名第16,较为靠后;中国的发文总量排名第二,总被引频次排名第一,篇均被引频次排名第二,在全球均处于领先地位;加拿大篇均被引频次高达8.02,说明加拿大在无人车用智能导航技术研究领域处于较高水平。
无人车用智能导航技术领域的主要研究方向包括工程电气电子、自动化控制系统、机器人技术、计算机科学人工智能、工程航空航天、遥感、电信、仪器仪表等类目。其中,工程电气电子类排名第一,发文量高达1642 篇,占总发文量的40%以上;自动化控制系统类排名第二,发文量为906 篇;机器人技术类排名第三,发文量为856 篇。
3 研发情况
在incoPat 数据库中,根据研究主题,构建检索策略①(TIABC=((unmanned ADJ vehicle OR unmanned ADJ ground ADJ vehicle OR 无人车OR 无人地面车辆OR Autonomous ADJ Vehicle OR 自主车辆)) AND TIABC=((导航OR navigation OR GPS ADJ denied OR GPS ADJ rejection OR GPS ADJ reject OR inertial OR gyro OR accelerometer OR 惯性OR 陀螺OR 加速度计))) AND (AD=[19900101 to 20200616]),共检索到3708 条专利文献(检索时间截止到2020年6月16日)。
3.1 总体情况分析
3.1.1 专利申请时间分布
从无人车用智能导航技术国内外专利申请情况来看,1990—2010年,世界关于无人车用智能导航技术研究专利申请数量相对较少,大部分在50 件以下,每年申请的专利数量增长缓慢。2010—2015年,该技术领域的专利申请数量保持快速稳定增长,每年专利申请数由2011年的70 件增长到了2015年的250 件。2016—2017年,随着技术的发展,该技术领域的专利申请数量也呈爆发式增长,2016年专利申请数量为570,是2015年的2.28 倍,2017年更是达到了827。2018—2019年专利申请数量逐渐回落。中国从2000年开始有相关技术领域专利申请,但每年申请数量较少。2015年开始,该技术领域专利申请数量开始稳定增长,2019年最高达到122 件,如图3 所示。
3.1.2 专利申请国家/地区分布
从专利技术的国家/地区来源来看,美国在无人车用智能导航技术领域申请的专利技术占比最多,达56.30%,超过了总量的一半。排名第二和三的分别是中国和韩国,专利申请数量占比分别为10.52%和6.56%看,如图4 所示。从专利技术的市场分布来看,专利市场主要分布于美国、亚洲和欧洲。

图3 无人车用智能导航技术研究专利年代分布Fig.3 The distribution of patents in intelligent navigation technology for unmanned vehicles
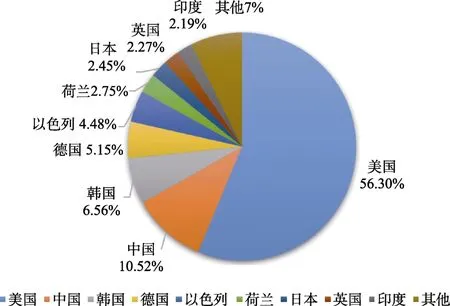
图4 无人车用智能导航技术研究专利国家/地区分布Fig.4 The distribution of patents in intelligent navigation technology for unmanned vehicles by country/region
3.1.3 主要专利权人分析
从检索结果看,专利申请数量位居前10 位的机构中全部都是企业,如表6 所示。排名第一位的专利申请人为美孚视觉科技有限公司(MOBILEYE VISION TECHNOLOGIES LTD),专利申请数量为143 件;排名第二的是Zoox 公司,专利申请数量为109 件;Caterpillar 公司排名第三,专利申请数量为106 件,如图5 所示。
分析专利持有时间和新专利申请量,可以看出竞争机构对于某一技术的领先程度和最新的技术发展态势。在无人车用智能导航技术研究领域相关专利中,分析排名前10 位机构的专利延续时间和近5年专利数量占总量的比例情况可以看出:除了Caterpillar 公司,大部分公司在该技术领域都保持较高的活力,近5年的专利申请量占其总的专利申请量都在70%以上。
3.1.4 中国专利权人情况分析
中国研发机构在无人车用智能导航技术研究领域专利申请数量方面排名较为落后,在全球专利排名前10 的机构中,中国机构无一上榜。在中国专利权人前10 位的排名中,企业和高校各占一半,5 家企业中有4 家近5年开始申请相关技术领域专利,如表7 所示。中国研究机构进入该技术领域的时间相对较短,但保持着活跃的研发活动和技术创新能力,专利申请量逐年上升。
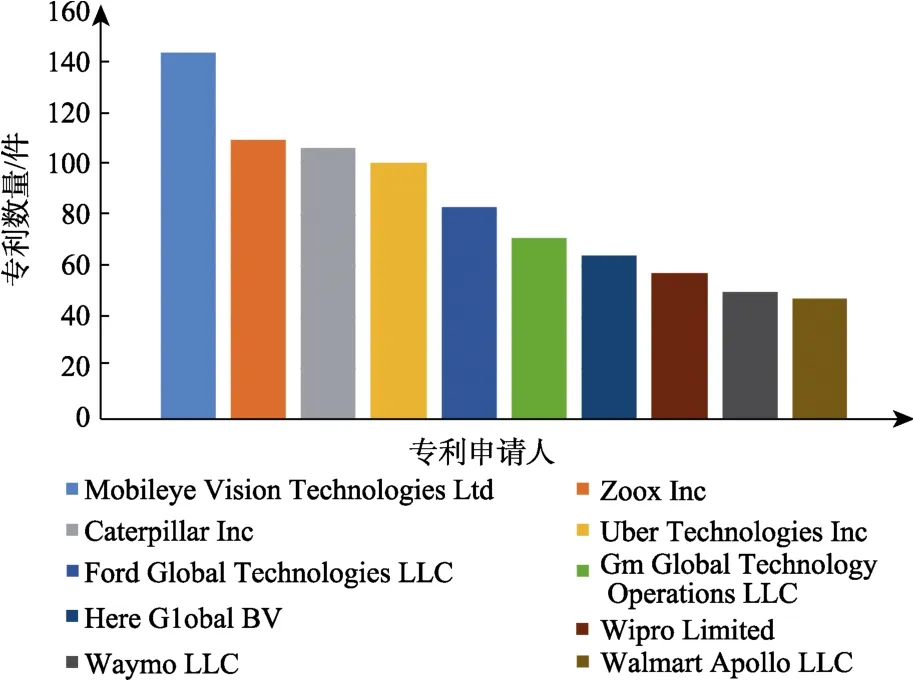
图5 无人车用智能导航技术主要专利申请人Fig.5 Main patent applicants for intelligent navigation technology for unmanned vehicles

表6 无人车用智能导航技术主要专利申请人详细信息Table 6 Details of main patent applicants for intelligent navigation technology for unmanned vehicles
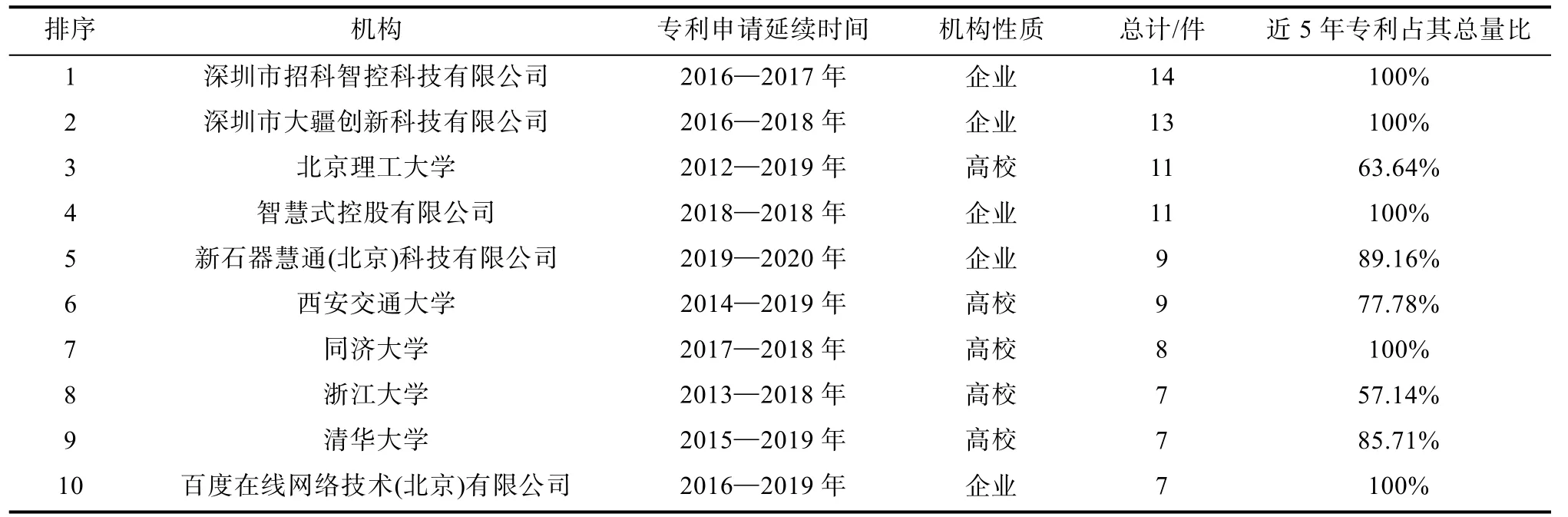
表7 中国专利权人情况分析Table 7 Analysis of Chinese patentees
3.2 技术主题分析
3.2.1 专利研发技术热点分布
根据图6 绘制的技术主题分布图可以看出,目前无人车用智能导航技术专利申请内容主要集中在无人地面车辆、自动驾驶、自主车辆导航、障碍物检测以及自主车辆定位5 个方面。申请热点包括导航、导航系统、导航卫星、惯性技术、地球物理数据、自主车辆导航、自动引导车辆、自主车辆定位、激光雷达、位置数据、神经网络、目标跟踪算法、传感器、卷积神经网络、自动驾驶等。
3.2.2 主要国家专利技术主题分布
将无人车用智能导航技术专利申请按照专利分类号进行incoPat 代码分类,如表8 所示。在该研究领域,技术研发主要集中在位置控制、导航、控制系统、定位系统、反辐射/再辐射系统、参数计算、道路车辆等几个方面。
按照专利申请前10 位的国家和前10 位的专利分类技术进行申请国家incoPat 代码分析,如图7 所示。在国家与专利申请的incoPat 代码分类分析中,如表9 所示,美国、中国、德国、以色列、日本、英国在incoPat 代码分类的前10 位技术领域中均开展了研究。
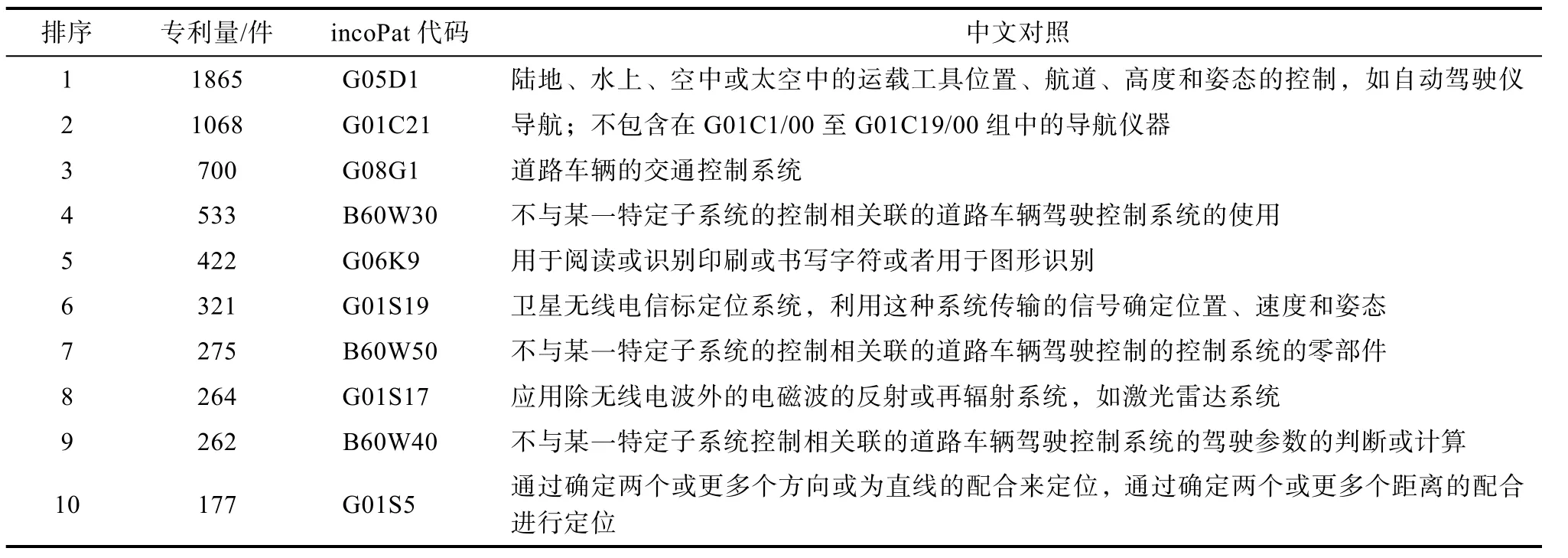
表8 专利技术主题分布情况分析Table 8 Analysis of the distribution of patented technology topics
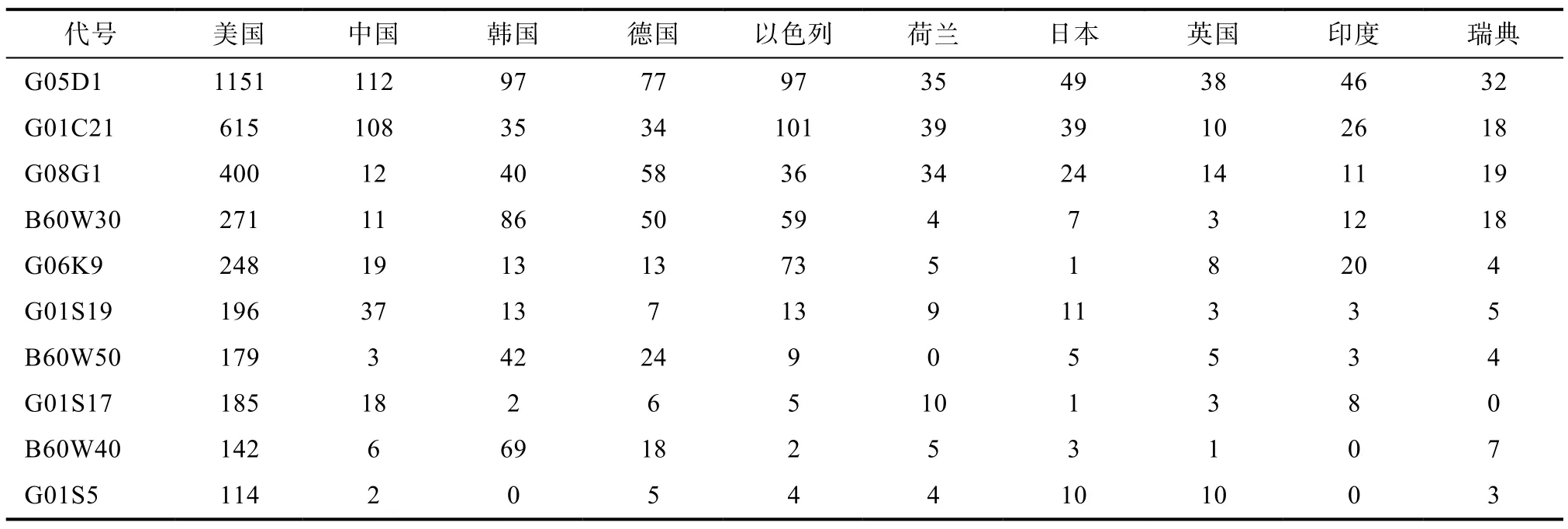
表9 主要国家专利申请技术按主题分布的数量 (单位:件) Table 9 The quantity of patent applications in major countries by subject
3.3 小 结
1990—2010年,世界关于无人车用智能导航技术研究专利申请数量相对较少,每年申请的专利数量增长缓慢。2010—2015年,该技术领域的专利申请数量保持快速稳定增长。2016—2017年,随着技术的发展,该技术领域的专利申请数量也呈爆发式增长,2017年达到了历史最高值827 件。中国从2000年开始有相关技术领域的专利申请,但每年申请数量较少。2015年开始,该技术领域的专利申请数量开始稳定增长,2019年最高达到122 件。
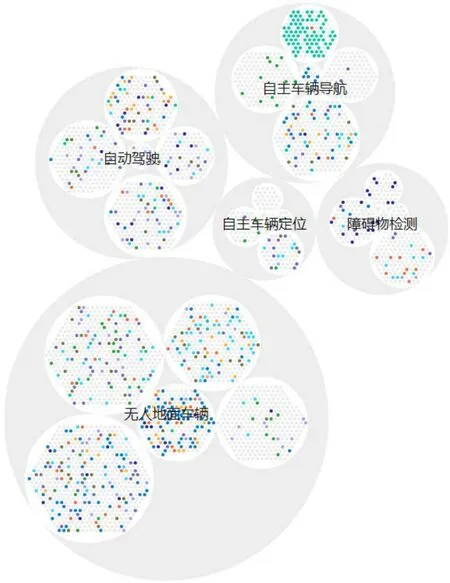
图6 无人车用智能导航技术热点分布Fig.6 The distribution of smart navigation technology hotspots for unmanned vehicles
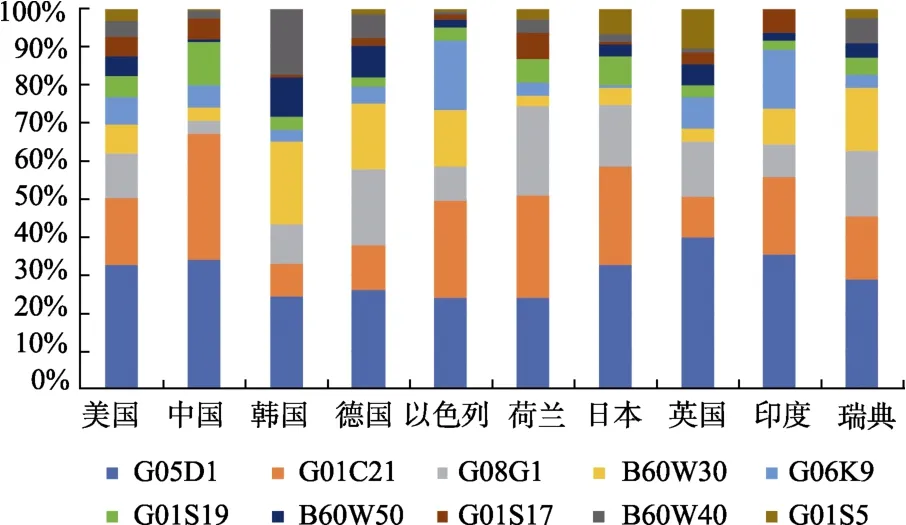
图7 主要国家专利申请技术主题分布Fig.7 The distribution of technical topics of patent applications in major countries
从专利技术的国家/地区来源来看,美国在无 人车用智能导航技术领域申请的专利技术占比最多,达56.30%,超过了总量的一半。排名第2 和3 的分别是中国和韩国,专利申请数量占比分别为10.52%和6.56%。从专利技术的市场分布来看,专利市场主要分布于美国、亚洲和欧洲。
在无人车用智能导航技术研究领域专利申请数量方面位居前10 位的机构全部都是企业。排名第1 位的专利申请人为美国美孚视觉科技有限公司,专利申请数量为143 件。中国研发机构在无人车用智能导航技术研究领域专利申请数量排名较为落后,在全球专利排名前10 的机构中,中国机构无一上榜。在中国专利权人前10 位的排名中,企业和高校各占一半,5 家企业中有4 家近5年开始申请相关技术领域专利。
目前,无人车用智能导航技术专利申请内容主要集中在无人地面车辆、自动驾驶、自主车辆导航、障碍物检测以及自主车辆定位5 个方面。申请热点包括导航、导航系统、导航卫星、惯性技术、地球物理数据、自主车辆导航、自动引导车辆、自主车辆定位、激光雷达、位置数据、神经网络、目标跟踪算法、传感器、卷积神经网络、自动驾驶等。
4 结 论
本文通过Web of Science 文件检索数据库和incoPat 专利数据库对1990—2020年无人车用智能导航技术研究领域的论文出版和专利申请情况进行了梳理。从发展趋势、国家/地区分布、机构分布、研究主题、专利权人、专利研发技术热点等方面开展深入研究分析。研究结果表明,2010年以后,在无人车用智能导航技术研究领域的论文发表和专利申请的数量都保持较稳定的快速增长;美国和中国在近30年论文发表和专利申请的数量方面一直保持世界领先地位;在无人车用智能导航技术研究领域,论文和专利分析结果表明,研究热点主要集中在导航系统、导航卫星、惯性技术、地球物理数据、自主车辆导航、自主车辆定位、激光雷达、位置数据、神经网络、目标跟踪算法、传感器、卷积神经网络、自动驾驶等方面。
