怠速充电工况下的电池SOC平衡控制
2021-04-14莫崇相祁宏钟
莫崇相,吴 坚,祁宏钟
(广州汽车集团股份有限公司汽车工程研究院,广州 511434)
前言
结合内燃机和电机的混合动力[1]是现阶段车辆动力总成的发展趋势之一。虽然目前混合动力的构型有多种形式,但无论何种构型都围绕单电机或双电机作为动力增加源[2]的范畴展开。而绝大多数的混合动力构型以及增程式电动车都存在发动机怠速充电工况。作为混合动力电能量储存和释放的关键部件,动力电池犹如一个能量调节中间装置,因此怠速充电工况下电池的SOC 平衡性控制绝对是混合动力控制中必须要解决的关键性课题,其控制效果直接影响能量的利用效率和电池的安全性。特别在电池的SOC 达到电池极限时,怠速状态下电池的SOC 平衡性控制[3]显得至关重要。
1 混合动力怠速充电模型
为更好兼顾到混合动力各类构型所涉及的怠速充电工况的控制设计,现以市场上具有代表性的P2混合动力单电机混合动力构型和某双电机的混合动力构型来设计怠速充电过程电池SOC的平衡性控制。
考虑到该两种混合动力的构型在怠速充电工况下转动惯量和速比不同,在本文混合动力总成模型中引入怠速充电的等效转动惯量JSER和怠速充电时发动机至电机的速比iEM1。该两种混合动力模型如图1 和图2 所示,图中相关模型参数如下:Je为发动机转动惯量;Jp为车轮至双离合器端等效到输入轴上的转动惯量;Jk为K0 离合器转动惯量;Jc为双离合器转动惯量;Jm为电机转动惯量;JSER为增程模式发动机至电机等效转动惯量;JR为怠速耦合部件的转动惯量;Te为飞轮端转矩;Tk为K0 离合器转矩能力;Tr为K0 离合器处等效残余转矩;Tt为传递到车辆端转矩;Tm为电机1 的实际输出转矩;ωe为发动机转动角速度;ωk为K0 离合器转动角速度;ωm为电机转动角速度;ωp为双离合器转动角速度;ωW为车轮转动角速度;τ 为总传动比;iEM1为发动机至电机1的速比;iEM2为电机2 至差速器的速比。
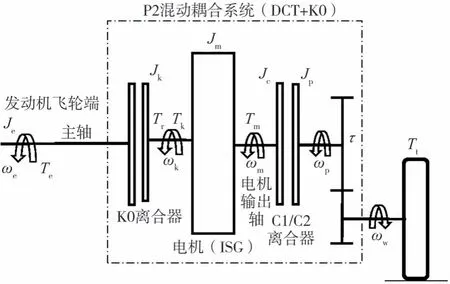
图1 单电机混合动力总成模型

图2 双电机混合动力总成模型
在模型中发动机的转矩其实包括两部分:一部分为发动机怠速时表示净输出驱动电机发电转矩,这也是怠速充电所需发动机控制输出目标;另一部分为发动机运转时发动机本身产生的各种摩擦阻力转矩[4]。对于混合动力来说,混合动力控制单元一般只关心参与动力净输出的发动机转矩或功率,而发动机内部的摩擦转矩或阻力功率则交由发动机自身控制完成。另外,针对以上两种构型的混合动力在怠速充电工况还须计算出其参与到怠速充电工况下的等效转动惯量。
单电机构型的等效转动惯量:

双电机构型的等效转动惯量:

2 电池SOC平衡控制目标计算
2.1 怠速充电SOC平衡控制设计
从上述两种混合动力构型来讲,车辆静置状态怠速充电在达到电池SOC 控制平衡点附近时,混合动力会根据电池的SOC 值来判断进行电池功率平衡性控制。但在发动机未停机的情况下,想完全控制发动机和电机精确提供车辆的附件功率难以做到。为此针对此工况一般做法都是将电池作为储能装置在允许的能量波动范围内动态调节动力总成的怠速充电净输出功率来完成电池SOC 平衡控制。而本文中则是通过分析电池的充放电功率进行设计,主动让电池进行过放和过充的间隔交替变化来动态调节动力总成的怠速充电功率。另外,怠速充电附件功率一般包括12 V 低压电池充电的DCDC 电功率和电动空调所使用的电功率,即P附件=PDCDC+P空调。
本文中动力计算的分析只围绕SOC 平衡性控制前涓流恒流充电、电池过放阶段和电池过充阶段的控制而展开。具体过程的控制设计如图3 所示。其中,W、CB、CC、CM、PB、PC、PM、E、M、S 分别表示电池能量、电池电流、充电电流、电机电流、电池电功率、充电电功率、电机电功率、发动机转矩、电机转矩、发动机或电机转速曲线,字母后的数字表示曲线上各点的位置。
根据图3 中设计的5 个控制阶段的划分,下面针对各阶段控制节点说明并给出相应的控制目标。
怠速涓流充电阶段 这一阶段主要是对在达到电池SOC 平衡控制前的涓流充电控制,其主要以小电流的恒流[5]充电。
电池能量过放切换阶段 这一阶段是达到电池SOC 控制目标后,将电池能量的充电状态切换成过放状态的切换过程。
电池能量持续过放阶段 这一阶段将以稳定的状态使电池能量持续进行过放以降低电池能量,至控制目标允许过放最低值。

图3 怠速充电SOC平衡控制时序
电池能量的过充切换阶段 在电池SOC 或能量达到控制目标最低值时,须对电池进行充电以满足控制目标SOC 的要求,这一阶段就是将电池能量从持续过放状态切换到过充充电状态的过渡过程。
电池能量持续过充阶段 这一阶段主要实现怠速工况发动机对电池能量进行持续充电以满足目标SOC 或电池能量的控制。
另外,为进行怠速充电工况电池SOC 平衡性控制的估算,需要引入控制目标计算引用的相关参数定义,这也是后面分析控制过程目标计算的基础和边界,具体如下。
发动机转速差响应能力系数:IEJK
电池至附件端等效电阻:RCB
电机至附件端等效电阻:RCC
电池SOC 的百分比:Ssoc
电池SOC 代表的能量:EW
电机机械功率与电功率的转化效率:ηm
循环SOC 平衡性控制电池能量微过放系数:γ
2.2 怠速涓流充电控制
由于电池的单体电压在未达到允许最大的电压前,最好办法就是采用恒流进行充电[5],因此在怠速充电涓流充电阶段采用的是恒流充电作为控制目标。
A 阶段:涓流充电控制
考虑到电池的SOC 与能量并非线性,因此需要根据实际SOC 上升的目标速率标定涓流充电的电池能量增量目标ΔEW。为实现涓流充电阶段的恒流控制和充电速率标定可控,需要根据电池SOC 变化的能量梯度来计算电池净充电电流ICB1。可计算A 阶段的电池充入能量为

式中:tA为此阶段的控制时间;UCB1为CB1 位置电池电压;ΔE(W2-W1)为W2 与W1 代表SOC 跳变的电池能量差。
由电池净充电目标电流以及考虑到怠速时发动机功率和电机功率稳定性最低值要求,可以计算出电池的目标充电功率PPB1、充放电功率PPC1和电机目标电功率PPM1为


式中:UW1为W1 处电压;为电流充电控制最小电流;为发动机最低稳定功率;为电机最低稳定功率。
由式(7)电机的目标电功率并考虑到怠速转速角速度波动可计算此时的电机转矩和发动机净输出转矩为
式中Δω为此阶段转速角速度波动量。
2.3 电池能量过放控制
当电池在涓流充电达到SOC 控制平衡点时,需要进行电池能量过放控制。由于电池真实的SOC 与混合动力允许使用SOC 并不相等,因此为控制混合动力的SOC 值保持恒定,须事先测试标定出进行SOC 平衡控制的过放和过充电池能量变化目标ΔEW。由于电池在过放控制一定是过充或涓流充电阶段切换而来,因此电池能量过放控制在这一过程又分为切换到过放控制和持续过放控制两阶段。
B 阶段:切换到过放控制
在切换到过放控制阶段,可以通过标定确定电机此时PPM2功率为0,将完全由电池进行放电满足附件用电的需求,由此可计算出充放电等效功率和电池的目标电功率为
由式(11)的电池目标净过放功率和电池的电压可以计算出电池的目标过放电流为

在此阶段一般标定控制电机的电功率为微小的值,如标定为0 kW,由此可以计算电机的机械目标转矩为

为防止因发动机怠速转矩迅速降低而带来的发动机熄火风险,在实际控制中S2 转速可作适当增加,例如增加25 r/min。由此可以计算出发动机目标净输出转矩为

在实际控制中,为修正发动机机械功率的变化落后于电机功率变化而造成控制上的振荡,此阶段的控制时间需要在正常标定切换时间与发动机机械变化的最小时间取较大值,即

C 阶段:持续过放控制
在持续过放控制阶段,通过电池的过放功率进行持续放电。从控制上讲,考虑到电池过放和过充频繁切换而造成动力总成的反复调节,因此需要定义B 阶段和C 阶段联合起来的过放阶段的最低过放时间。另外,考虑到长时间累积效应和电池温度等影响,工程上的实际做法都让电池处于SOC 平衡循环微过放状态,定义电池能量微过放因子γ。因此可以得到C 阶段的控制持续过放时间为

根据上述的B 和C 阶段电池的净放电功率的积分,可以计算出过放总能量为
由式(18)电池过放能量就可以得到持续过放结束时电池的目标电流为

由于此过程同时存在电池放电电流和电机的充电电流,并考虑到附件功率可以估算出充放电的等效功率为

由式(20)的充放电等效功率可以得到电机的充电目标电功率为

考虑后续怠速充电从过放阶段切换到过充阶段,发动机的转速也需要回到怠速的目标转速的要求,因此在此阶段S3 可标定为超调怠速转速的60%左右,作为怠速功率控制目标来进行控制,结合式(21)中的电机目标电功率可以得到电机的机械目标转矩和发动机的目标净输出转矩为

2.4 电池能量过充控制
在电池能量过放控制后,电池的SOC 值将在控制精度允许的范围内下降到SOC 平衡能量的下限值。为使电池的能量波动在控制允许的平衡范围内,需要将电池的过放控制转变成过充控制。该过程可分为切换到过充控制阶段和持续过充控制阶段。
D 阶段:切换到过充控制
电池由持续过放控制切换到过充控制的充电电流不仅要考虑到定义最大过充电流,还要考虑到整个怠速工况下SOC 平衡控制过放与过充调节切换的频率,如果切换频率过高容易造成动力总成的振荡,因此切换到过充的目标电流可按下式作估算:
式中t(D+E)为D 和E 阶段时间之和。
由目标过充电流可以计算出充放电的目标功率和电机的目标充电功率为

由电机的目标充电功率可以计算出相应电机目标机械转矩和发动机的净输出转矩为


由于发动机的机械响应要明显慢于电机的变化,在实际的控制过程中经常会出现控制的瞬间超调现象,从而造成转速被瞬时拉低现象,其转速超调的范围估算为

E 阶段:持续过充控制
根据过充的时间和电池能量增加目标ΔEW可以计算持续过充阶段结束时的目标电流为

如果要在持续过充阶段对电池的充电电流采用恒流控制,即ICB6=ICB4,通过联立式(30)与式(24)并考虑能量目标相等的关系,可以得到ICB4与ICB3满足的关系式为

上式中持续过充充电时间tE在实际控制中还需要考虑最大充电电流和整个最少过充充电时间的影响,因此实际时间估算按下式进行:

由式(30)目标过充电流和附件功率可以计算出充放电等效功率和电机的目标电功率为

由式(33)可以得到电机的机械目标转矩和发动机的目标净输出转矩为

2.5 电池SOC平衡循环控制
在完成上述电池SOC 能量平衡控制一个循环后,由于怠速充电仍在继续,因此基于电池SOC 平衡区间能量控制调节需要接着上一循环进行控制。但在控制设计时须考虑到一个循环开始和结束点电池实际充电能量不准造成的累积效应,因此须根据电池的实际SOC 变化调整累积能量的清零控制。具体的做法是在每个循环的持续过放阶段和持续过充阶段加入电池的SOC 监控,并根据SOC 值的变化来延长持续过放时间和持续过充时间。实测怠速充电SOC 平衡控制15 个循环下的过放和过充时间统计如表1 所示。

表1 多循环SOC平衡控制过充过放时间统计
3 仿真分析
对上述的怠速充电工况电池的SOC平衡能量控制设计进行仿真分析。以P2 构型为例进行仿真(取iEM1=1),并根据上述设计的控制策略和其控制目标的计算公式来控制关键点目标,设置表2 中的仿真参数作为模型的控制仿真输入,并进行仿真计算。
考虑到简化仿真的需要,定义发动机摩擦转矩、电机能量转换效率以及附件功率简化为常值。同时考虑SOC平衡区间电池能量变化较小,电池的电压变化非常微小,在仿真时取定值以简化仿真模型。因此根据上述的各控制阶段的时间估算以及考虑到过充和过放的切换频率影响,标定如表3 中的各阶段控制目标时间进行仿真。然后根据控制策略的控制目标值进行仿真。

表2 仿真参数值定义

表3 标定仿真控制阶段时间 s
将上述定义的参数输入仿真计算模型,仿真出怠速充电工况下的SOC 平衡控制在涓流充电、充电过放阶段以及充电过充阶段的SOC值、电池能量、目标电流、目标电功率、目标转矩和转速等仿真信号数据,如图4 所示。同时,通过仿真可知,在标定的阶段控制时间内确实实现了电池SOC 的平衡性控制,这证明通过能量变化梯度为控制设计目标能很好实现怠速充电工况电池的SOC平衡能量控制。
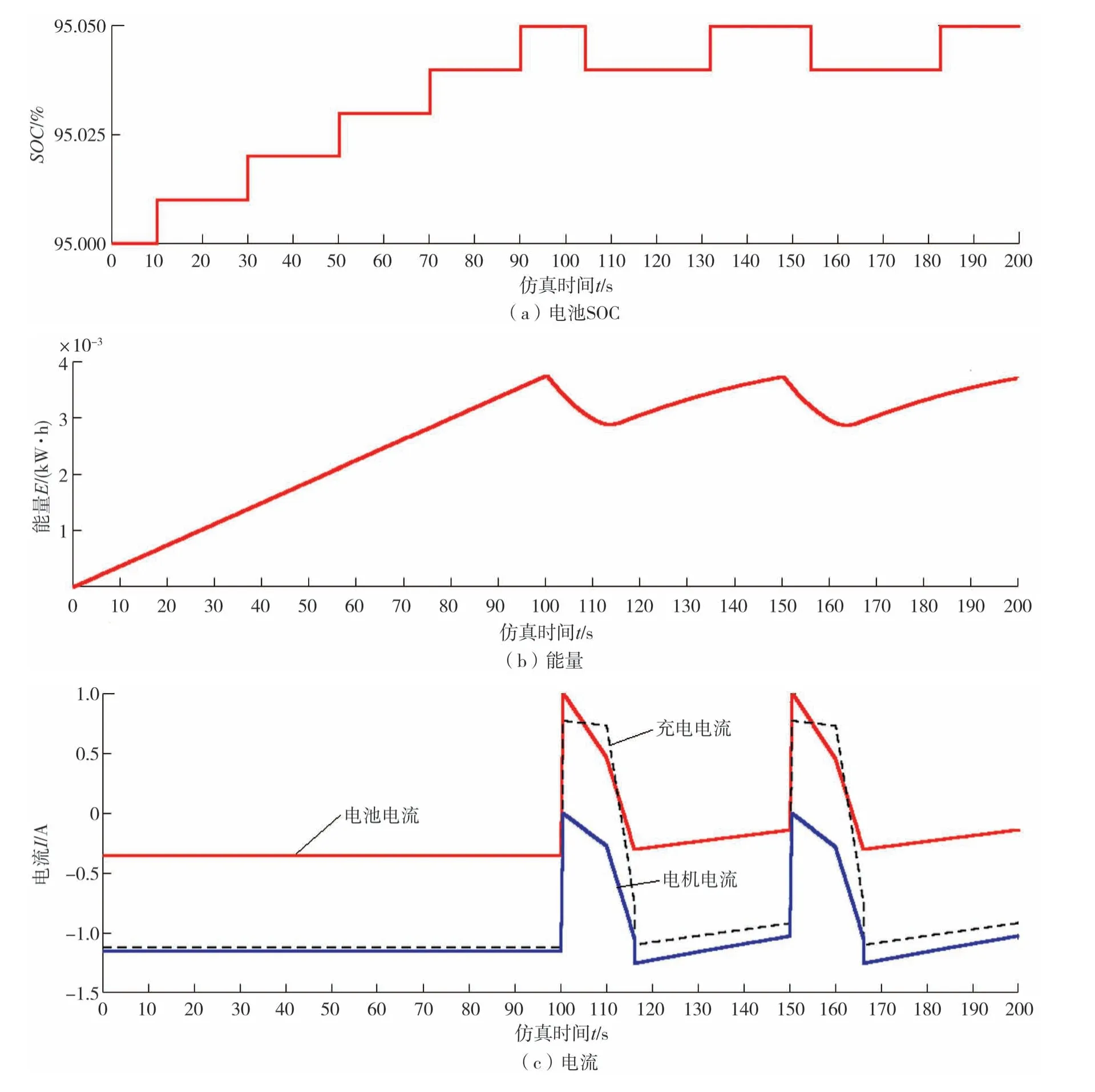

图4 怠速充电工况SOC平衡控制仿真结果
4 实车验证
将上述怠速充电工况SOC 平衡能量控制策略应用到某一混合动力车辆控制软件中。车辆通过联合测试和标定,分别采集SOC、电流、电压、转矩和转速等CAN 信号数据,具体参数定义如表4 所示。然后通过电压和电流或转矩和转速的乘积计算出功率值信号以及通过功率积分求得电池充放电能量信号的变化。
该SOC 平衡能量控制过程由混合动力控制单元根据电池的相关信号、附件功率信号以及部件参数按照控制策略的目标要求主动请求发动机和电机发出控制目标转矩对电池进行过放和过充控制,数据显示控制策略精确实现了电池在怠速充电工况下的SOC 平衡能量控制,具体如图5 和图6 所示。图中两条竖线①、②处的具体数值参见右边表格中Cursor1和Cursor2列所对应的数值,图中数字1,2,∙∙∙,10 对应右边表格中相应行的参数信号曲线。图中左侧坐标轴代表不同信号类的坐标值范围(如电流、功率、转速和转矩等)。从图5 中的实测数据可知,实车控制效果较好遵循了设计的控制策略的动力性要求,并有效控制了SOC 的平衡点(见电池SOC 和混合动力SOC)。另外,从图6 的多个循环实测数据中,控制模型通过延长持续过放和持续过充的时间成功解决了单个循环电池能量累积的清零问题。另外,多个循环控制中电池的充放电能量长期处于微过放状态,这从根本上排除怠速充电因为温度和多循环控制能量不准的累积效应对电池带来的安全隐患。

表4 测试参数定义

图5 单个循环SOC平衡控制实测数据
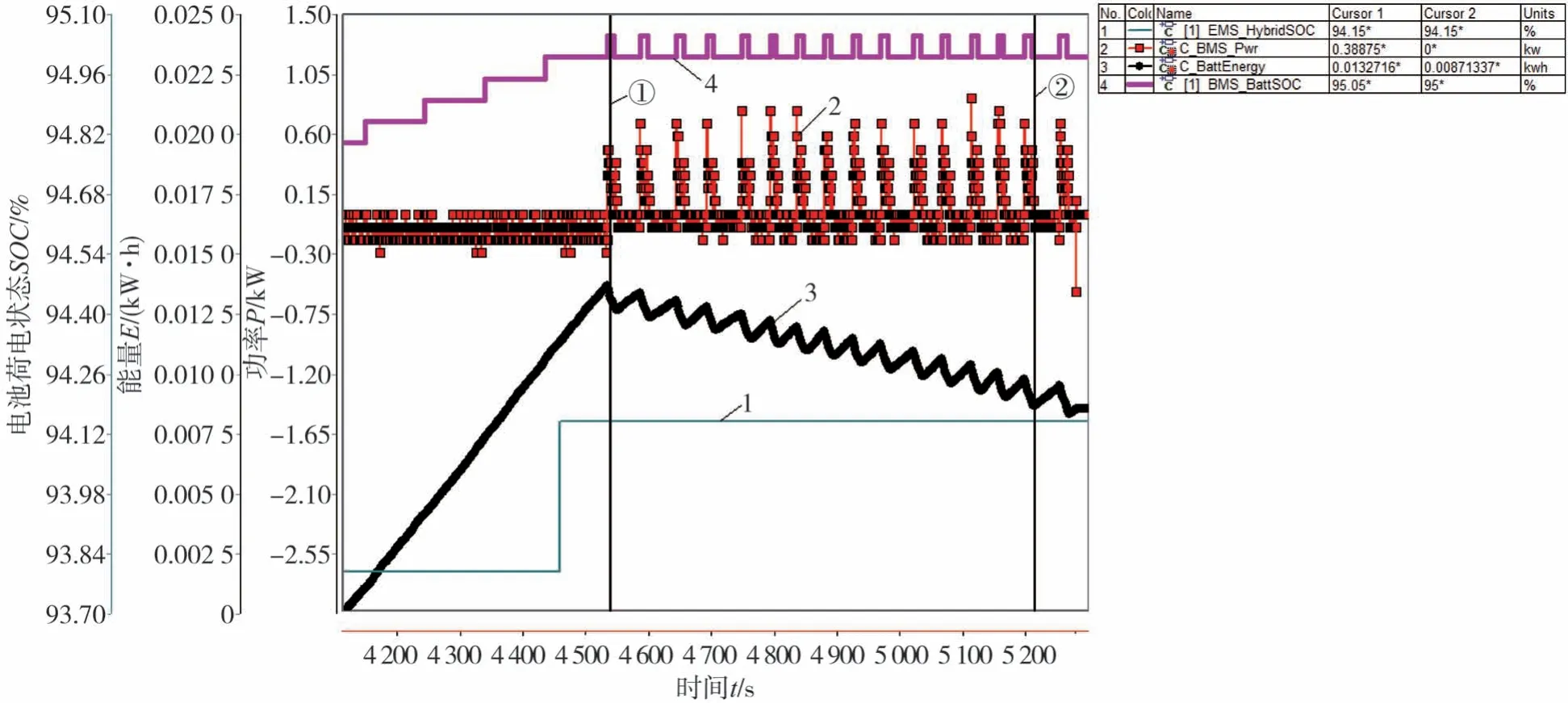
图6 多个循环SOC平衡控制实测数据
5 结论
从分析常用的单电机和双电机的混合动力怠速充电模型出发,考虑到控制策略的通用性,设计出适应于多种混合动力构型的怠速充电工况下的电池SOC 平衡能量控制策略。由于参数差异和控制误差的存在,动力总成控制无法准确提供附件用电功率以使电池完全没有充放电现象,为此设计了一种通过主动过放和过充循环交替来实现混合动力SOC 的平衡点和电池能量波动范围的精确控制。本文中不仅给出了控制过程目标点的动力计算公式,还通过仿真证明该方法的可行性。在将控制策略应用到实际车辆上时,通过实车数据采集和分析,可以较好地达到控制策略设计的目标要求。该策略非常精确地控制了怠速充电工况下的SOC 平衡点的电池能量波动范围。
