应用于机械手的磁致伸缩触觉传感器阵列与物体识别
2021-04-13王博文赵智忠
黄 珊 王博文 赵智忠 王 亮 翁 玲
应用于机械手的磁致伸缩触觉传感器阵列与物体识别
黄 珊1,2王博文1,2赵智忠1,2王 亮1,2翁 玲1,2
(1. 河北工业大学省部共建电工装备可靠性与智能化国家重点实验室 天津 300130 2. 河北工业大学河北省电磁场与电器可靠性重点实验室 天津 300130)
利用磁致伸缩材料铁镓合金(Galfenol)设计制作了触觉传感单元,并将其集成为阵列,安装在二指机械手上。基于电磁原理、逆磁致伸缩效应和欧拉伯努利动力学原理,建立触觉传感单元力测量模型。设计的传感单元测力范围为0~3N,当压力小于1.5N时,灵敏度为151mV/N,在1.5~3N区间,灵敏度约为109mV/N,测量较低的静态力时具有更高的灵敏度,在2~4Hz范围内对动态力具有动态响应快、灵敏度高的特点。根据机械手的测量范围,选取形状较为规则的六种饮料瓶样品进行了抓取,搭建实验系统进行数据采集与存储,测试了传感器阵列的输出特性,集成的传感器阵列能很好地辨识所选样品,对于装满水样品有更高的精度。选择合适的特征值,应用支持向量机算法,通过选择不同的特征值数量和训练集与分类集的比例,对采集的数据进行分类识别。经计算可知,选择三个特征值且训练集与分类集比例为9:1时识别率最高,为87.5%。
铁镓合金 触觉传感器阵列 支持向量机 物体识别
0 引言
为了使机械手的操作更为准确,需要在机械手上安装触觉传感器,以获得触觉信息,并准确地对物体进行分类。有关触觉传感器的研究已做了诸多工作,文献[1]设计了一种新型结构的压阻式触觉传感器,在室温、0~5kPa的工作范围内,灵敏度为4.65mV/ V/kPa,可以测量小于5kPa的绝对微压力。毛磊东等用炭黑/石墨烯为敏感材料,硅橡胶为基体,聚酰亚胺为柔性电极,设计了一种微圆顶阵列结构的柔性传感器,构建了三维力传感器理论数学模型,该触觉传感器能有效地感知三维力[2]。M. Mitsutoshi等用独特的制造工艺,将电容式触觉传感器及通信功能封装在2.5mm×2.5mm×0.3mm的模具中。其线性灵敏度为57 640Hz/N,波动为10mN[3]。文献[4]介绍了一种高灵敏度的压电触觉传感器,可以检测低至300Pa的压力。但压阻式触觉传感器中的压阻材料功耗高,易受噪声影响且易碎[5]。电容式触觉传感器的输出电容较小,信噪比低,易受外界的干扰[6]。压电式触觉传感器灵敏度虽然高,但是空间分辨率低,静态力检测性能较差[7]。
铁镓合金(Galfenol)有饱和磁场低、磁滞小、线性度好、力学性能好、应力灵敏度高等优点[8],且制作的传感器结构简单、可靠性高、精度高、成本低[9]。当铁镓合金受到外加载荷时,内部的磁化状态会随载荷的变化而变化,这种效应即为磁致伸缩逆效应。外加载荷力的大小,可通过测量载荷附近的磁场变化得到,因而铁镓材料可以作为传感器的敏感材料[10]。本文以丝状铁镓合金为敏感材料,利用磁致伸缩材料的逆效应,应用悬臂梁的原理,制作触觉传感单元。将制作的触觉传感单元集成为触觉传感器阵列,并安装在二指机械手上,对日常生活中的饮料瓶进行抓取实验,采用支持向量机算法,通过选择特征值的数量和训练集与分类集的比例,对选取的实验样品进行了分类识别。
1 触觉传感单元的结构及输出特性
1.1 触觉传感单元的结构
图1为磁致伸缩触觉传感单元结构图。传感单元主要由霍尔元件、铁镓丝、触头、永磁体和外壳组成。在3D打印的传感单元外壳上装有三根长度为6mm、直径为0.5mm的铁镓丝,永磁体放置在铁镓丝的正下方,为传感器提供偏置磁场,霍尔传感器(美国新泽西州霍尼韦尔公司,SS491B型)竖直紧贴在铁镓丝的后方,触头安装在铁镓丝的边缘上,高于传感单元的外壳,触头的高度为6mm。传感单元的尺寸为长8mm,宽6mm,高5mm。

图1 触觉传感单元结构图
1.2 触觉传感单元的输出电压模型
通过霍尔元件的霍尔效应可以检测触觉传感单元的输出电压,霍尔元件的输出电压H为[11]
式中,H为霍尔元件传递系数;H为霍尔元件检测的铁镓丝表面的磁感应强度。
而铁镓丝表面磁感应强度H的变化与其内部磁感应强度Gal的变化近似呈线性[12],可以表示为
式中,s为磁感应传递系数。
由磁感应强度公式可知,铁镓材料内部磁感应强度Gal可表示为

式中,为永磁体产生的偏置磁场;0为真空磁导率;为磁化强度。
由式(1)~式(3)可以得到,霍尔传感器的输出电压与铁镓丝中磁通密度的关系为

由铁磁性材料畴壁理论建立的磁化滞后模型可知外加磁场强度与磁化强度之间的关系。理想情况下,考虑文献[12]并应用变形的Langevin方程[13],可以得到与应力相关的无磁滞磁化强度an。



式中,e为有效磁场的强度;为畴壁相互作用系数;σ为应力作用下产生的磁场;an为无磁滞磁化强度;s为饱和磁化强度;为无磁滞磁化强度形状系数;为应力;为磁致伸缩系数。
由式(6)可得

并应用泰勒公式展开,取2忽略高次项可得
根据文献[14]的结果,可以得到
式中,s为饱和磁致伸缩系数。
结合式(6)~式(9)得到



当力=0时,输出电压的参考电压为s,则传感单元的输出电压可以表示为

传感单元输出电压模型中的参数见表1[15]。
表1 模型参数值

Tab.1 Parameter values of the model
1.3 触觉传感单元的输出特性
通过实验测得的传感单元输出电压与施加压力的关系曲线,以及应用式(13)计算得到的输出电压与施加压力的关系曲线如图2所示。可见实验结果与计算结果基本吻合。传感单元的输出电压随着压力的增大而增大,当压力增大到3N时,输出电压达到380mV。当压力小于1.5N时,由图2的实验结果可以认为输出电压随压力线性变化,触觉传感单元的灵敏度为151mV/N,在1.5~3N区间,灵敏度约为109mV/N,表明传感单元测量较低的静态力时具有更高的灵敏度。
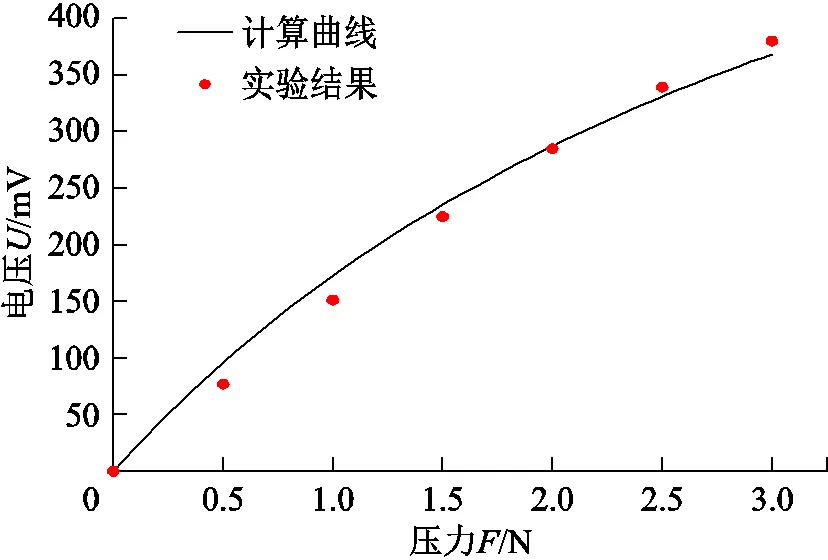
图2 触觉传感单元输出电压与力的关系
为了进一步测试传感单元的动态性能,采用线性电机作为振动周期和振幅不同的可调谐动力源,给传感单元施加动态信号。人手的触觉频率约为2~4Hz,为此研究了传感单元在此频率范围内的输出特性。在1~4Hz的频率下,对传感单元施加幅值为1N的动态力,测试得到的触觉传感单元输出电压波形如图3所示,其灵敏度为160mV/N。图3还给出了应用压电传感器得到的输出电压波形,其灵敏度为22mV/N。所制作的磁致伸缩触觉传感单元的灵敏度明显高于压电传感器的灵敏度,且力快速施加和释放时,触觉传感单元在不同频率下均能输出完整的波形,制作的磁致伸缩触觉传感单元可以精确测量动态压力。

图3 频率为1~4Hz、动态力幅值为1N时的触觉传感单元的输出电压波形
2 抓取物体时触觉传感器阵列的输出电压特性
设计的磁致伸缩触觉传感器阵列如图4所示。设1、2号传感单元中心距为,1、3号传感单元中心距为。通过COMSOL仿真软件计算1号传感单元受力且2号和3号单元未受力时的输出电压值,以确定相邻传感单元的位置,且尽量减小传感器阵列的尺寸。分析结果表明,当=9mm、=16mm、施加力大小为1N时,1号单元输出电压为160mV,其他单元的输出电压约为1号单元的1.5%。因此可取=9mm、=16mm。

图4 触觉传感器阵列
将设计的触觉传感单元集成为2×2触觉传感器阵列,焊接在长32mm、宽17mm的印制电路板(Printed Circuit Board, PCB)上,如图5a所示。两个传感单元的触头侧相对放置。图5b为一个传感器阵列封装外壳示意图,将触觉传感器阵列放置在外壳内,模仿人的一个指节,如图5c所示。因所使用的机械手为二指机械手,且每个手指有两个指节,因此制作了四个触觉传感器阵列。

图5 磁致伸缩触觉传感器阵列
实验选取了生活中常见且形状规则的六种饮料瓶为测试样品,编号为1、2、3、4、5、6,如图6所示。测试样品截面形状分为圆形和圆角方形,样品属性列于表2。

图6 测试样品
表2 测试样品属性

Tab.2 Properties of test samples

(续)
所搭建的测试系统由机械手、磁致伸缩触觉传感器阵列、数据采集卡、直流稳压电源、计算机和支撑物体平台组成,如图7所示。实验中所使用的机械手是中国武汉COBOT公司制造的,型号为COHAND201型,机械手通过法兰固定在桌子上。机械手具有两个手指,每个手指包括两个指节,四个指节共安装四个触觉传感器阵列,共计16个触点。通过计算机控制机械手的电机,使用开环或者闭环的控制方式控制机械手的张开和闭合来抓取物体。

图7 装备磁致伸缩触觉传感器阵列的机械手抓取物体测试系统
将实验样品固定在支撑平台上,保持机械手以恒定的速度闭合,采用无反馈的开环方式,对其进行抓取。抓取过程中记录垂直样品的法向力。当机械手刚与样品接触时,用计算机记下此时机械手的位置,此即为触觉传感器阵列的初始位置,如图8a中时间为=0s对应的位置500(所使用的机械手采用的控制方式中每个手指变化范围为0~1 000,对应直角坐标系中的0~90°。当输入0时,机械手处于张开状态,输入1 000时,机械手处于闭合状态)。控制机械手的手指再向内抓取3mm,机械手抓取稳定后,记录此时触觉传感器阵列每个触点的输出电压和触觉传感器阵列接触实验样品时的触点数目。
图8b所示为抓取3号样品时的触觉传感器阵列接触样品的触点数目。在0~0.5s时间内,机械手从位置500开始以不变的速度向3号样品靠近,在0.5s时,机械手刚接触到样品,磁致伸缩触觉传感器阵列与样品接触的触点电压开始发生变化,与样品接触的触点数目也开始发生变化,机械手左手的触点由0个变为2个,右手的触点由0个变为3个,此时触觉传感器阵列对应的位置为610。在1.0s时,左手的触点由2个变为6个,右手的触点由3个变为6个,触觉传感器阵列对应740的位置。图8c和图8d分别示出了左手和右手在抓取3号样品过程中触觉传感器阵列输出电压的变化。当<1.0s时,传感器阵列的输出电压变化很小,当>1.0s时,与样品接触的12个触点输出电压发生变化,后趋于稳定,最高输出电压为85mV。机械手的左、右手指上的触觉传感器均有2个触点未接触到样品,此4个触点输出电压为0。对于形状相同的样品,测试也得到了类似的结果,但机械手的初始位置和触觉传感器阵列的输出电压不同。对于形状不同的样品,机械手的初始位置、接触的触点数目和阵列单元的输出电压都将发生变化。

图8 机械手抓取3号样品时触觉传感器阵列的输出特性
根据图8a的抓取方式,对图6中的样品进行抓取,选取触觉传感器阵列中输出电压最高的一个触点,其输出电压波形如图9所示。从图9a可见,对于三个圆形样品(1~3号),对应的最高输出电压分别为166mV、181mV、86mV,最小输出电压差值为80mV,对应的抓取力为1.1N、1.25N、0.57N。对于三个圆角方形样品(4~6号),对应的最高输出电压分别为53mV、70mV、78mV,最小输出电压差值为8mV,对应的抓取力为0.35N、0.46N、0.52N。对于六个选取样品(1~6号),最小输出电压差值也为8mV,结果表明检测的六个样品对应的最高输出电压具有一定的区分度。

图9 抓取样品时触觉传感器阵列接触触点的输出电压
为了进一步检测磁致伸缩触觉传感器阵列输出电压对于生活中常见样品的区分度,应用机械手抓取1~6号装满水样品,选取触觉传感器阵列中输出电压最高的一个触点,如图9b所示。从图9b可见,1~6号装满水样品对应的最高输出电压明显增加,分别为195mV、215mV、108mV,133mV、121mV和148mV,最小输出电压差值为12mV,高于无水样品对应的最小输出电压差值8mV,对应的抓取力为1.29N、1.43N、0.71N、0.89N、0.81N、0.99N。表明装满水样品对应的输出电压具有更大的区分度。因此,将研制的磁致伸缩触觉传感器阵列安装于机械手,根据触觉传感器阵列的输出电压及接触的触点数目,可以抓取识别生活中常见的饮料样品。
3 应用支持向量机算法的物体识别
支持向量机(Support Vector Machine, SVM)是一类按监督学习方式对数据进行二元分类的广义线性分类器,使用铰链损失函数计算经验风险并在求解系统中加入了正则化项以优化结构风险,是一个具有稀疏性和稳健性的分类器[16]。其具有算法简单、较好的鲁棒性[17]等特点,并且拥有严谨的理论基础,目前已经应用于计算机学习、人脸识别[18]等领域。在电气领域中,应用于弓网电弧识别[19]、高压断路器故障诊断[20]、短路故障诊断[21]、电力系统暂态稳定评估[22]、电池容量预测[23]等方面,受到国内外的广泛关注。
选取图8中触觉传感器阵列的输出特性,对上述选择的每个样品抓取40次,采集数据,将数据应用于支持向量机算法,进行物体识别。设触觉传感器阵列的触头刚接触物体的时刻为1(图8b中的0.5s)。在1时刻,通过控制机械手的计算机可以提取机械手接触物体时的位置(图8a所示),位置即为触觉传感器阵列接触物体的初始位置,其可反映物体的直径或边长,将其作为第一个特征值。第二个特征值为2(图8b中的1.0s)时刻触觉传感器阵列与实验样本接触的触点数目,此特征值可以反映样本的形状(圆角方形或圆形)。触觉传感器阵列的输出电压值与样品自身属性及其内有无水密切相关,因此第三个特征值为抓取稳定时传感器阵列每个触点的输出电压值。
将数据按3:1的比例分训练集和测试集,经计算可知惩罚参数= 0.5且核函数参数= 5.656 85时,分类识别准确率最佳,为86.666 7%。确定支持向量机最优参数后,在此参数下对比不同比例训练集、测试集和不同数量特征值识别准确率。在机器学习中训练集的数量通常比测试集的数量多,才能保证较好的分类识别效果,且为了保持训练集和测试集的数量都为整数,选择不同的训练集和测试集比例,实验结果如图10所示。
通过图10可知支持向量机在训练集和测试集比例为9:1时,分类识别的效果最好,此时准确率为87.5%。理论上分析,训练集所占比例越高,支持向量机训练的模型越好,分类识别准确率越高,实验结果与理论上相同。此时分类准确率的混淆矩阵如图11所示。
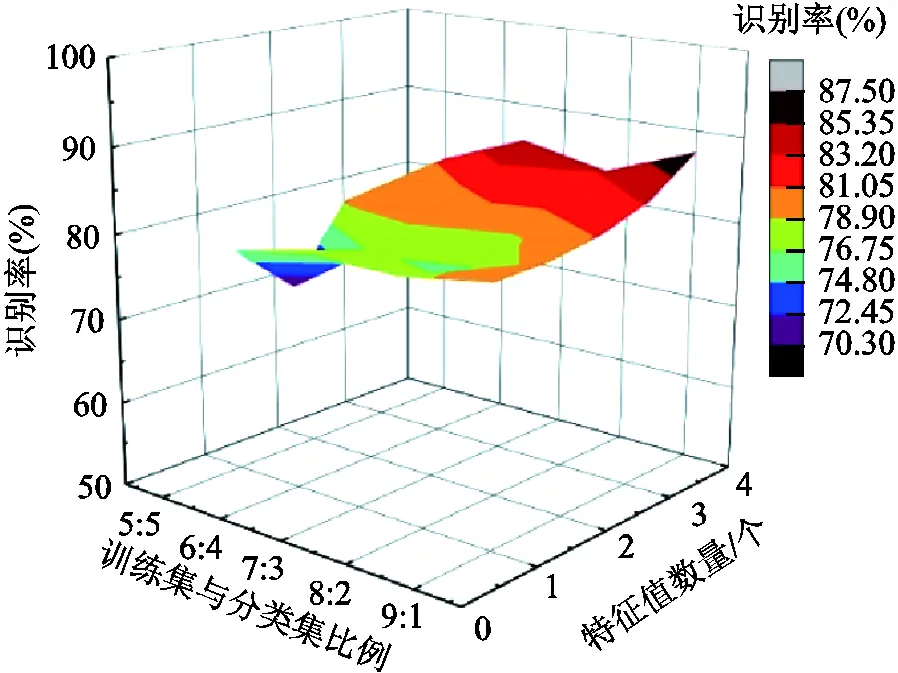
图10 不同特征值数量和不同训练集分类集比例的识别率

图11 分类结果混淆矩阵
磁致伸缩触觉传感器阵列能检测到关于测试样本的信息较多,通过提取特征值,应用于支持向量机算法,可以对选取的测试样本进行识别,获得较高的识别率,说明制作的磁致伸缩触觉传感器阵列性能较好,所选择的特征量能反映样本的特点。因此本文研制的传感器阵列可为机械手抓取物体进行识别提供必要的感知信息。
4 结论
设计制作了一种新型的磁致伸缩2×2触觉传感器阵列,应用电磁学理论、逆磁致伸缩效应和欧拉伯努利动力学原理,建立了触觉传感单元的输出特性模型。测试了触觉传感单元的静态性能和动态性能,传感单元测力范围为0~3N。当压力小于1.5N时,灵敏度为151mV/N;在1.5~3N区间,灵敏度约为109mV/N。在2~4Hz范围内对动态力具有动态响应快、灵敏度高的特点。将触觉传感器阵列装备在机械手上,应用实验测试系统,测试了触觉传感器阵列的输出特性。结果表明,根据触觉传感器阵列的输出电压及接触的触点数目,可以识别抓取的饮料样品,且对所选取的样品有很好的区分度。为进一步证明,对装满水的样品进行测试,获得了更高的识别精度。选择了机械手在抓取过程中能够提取的特征值,应用支持向量机算法,分别对不同特征值个数和不同训练集与测试集比例进行分类识别。实验结果表明,当训练集与分类集比例为9:1且选择三个特征值时,分类识别准确率越高,为87.5%。
[1]José L Ocaña, Li Chuang, Francisco Cordovilla,. Design optimization and fabrication of a novel structural piezoresistive pressure sensor for micro-pressure measurement[J]. Solid-State Electronics, 2018, 139(1): 39-47.
[2]毛磊东, 黄英, 郭小辉, 等. 一种可感知三维力的新型柔性触觉传感器及滑觉识别算法研究[J]. 传感技术学报, 2018, 31(6):891-897. Mao Leidong, Huang Ying, Guo Xiaohui, et al. Research on a novel flexible 3-axis tactile sensor and slip recognition algorithm[J]. Chinese Journal of Sensors and Actuators, 2018, 31(6): 891-897.
[3]Mitsutoshi M, Masanori M, Shuji T , et al. Design and fabrication technology of low profile tactile sensor with digital interface for whole body robot skin[J]. Sensors, 2018, 18(7):2374.
[4]Spanu A , Pinna L, Viola F , et al. A high-sensitivity tactile sensor based on piezoelectric polymer PVDF coupled to an ultra-low voltage organic transistor[J]. Organic Electronics, 2016, 36: 57-60.
[5]Liang Zou, Chang Ge, Wang Z J, et al. Novel tactile sensor technology and smart tactile sensing systems: a review[J]. Sensors, 2017, 17(11): 2653.
[6]Denei S, Maiolino P, Baglini E, et al. Development of an integrated tactile sensor system for clothes manipulation and classification using industrial grippers[J]. IEEE Sensors Journal, 2017, 17(19): 6385-6396.
[7]Wang Rongrong, Dong Chunfeng, Zhao Ruomeng, et al. Flexible and controllable Piezo-Phototronic pressure mapping sensor matrix by ZnO NW/p-Polymer LED array[J]. Advanced Functional Materials, 2015, 25(19): 2884-2891.
[8]翁玲, 吕稼先, 王跃虎, 等. 应力对 Galfenol 合金感应强度的影响[J]. 磁性材料及器件, 2016, 47(1): 1-4. Weng Ling, Lü Jiaxian, Wang Yuehu, et al. Effect of stress on the magnetic induction of Galfenol alloy[J]. Magnetic Materials and Devices, 2016, 47 (1): 1-4.
[9]Li Yunkai, Wang Bowen, Li Yuanyuan, et al. Design and output characteristics of magnetostrictive tactile sensor for detecting force and stiffness of manipulated objects[J]. IEEE Transactions on Industrial Informatics, 2018, 15(2): 1219-1225.
[10]Zhang Ru, Duan Yuanfeng, Wing O S, et al. Smart Elasto-Magneto-Electric (EME) sensors for stress monitoring of steel cables: design theory and experimental validation[J]. Sensors, 2014, 14(8): 13644.
[11]万丽丽, 王博文, 索峰, 等. 基于磁致伸缩逆效应的纹理触觉传感器研究[J], 河北工业大学学报, 2019, 48(5): 1-6. Wan Lili, Wang Bowen, Suo Feng, et al. Research on texture tactile sensor based on inverse magnetos-trictive effect[J]. Journal of Hebei University of Technology, 2019, 48 (5): 1-6.
[12]王博文, 谢新良, 周露露, 等. Fe-Ga磁特性测试装置改进与动态磁致伸缩实验[J]. 光学精密工程, 2017(9): 143-151. Wang Bowen, Xie Xinliang, Zhou Lulu, et al. Improvement of testing device for Fe-Ga magnetic properties and dynamic magnetostrictive experiment[J]. Optics and Precesion Engineering, 2017(9): 143-151.
[13]Stoppels D. Developments in soft magnetic power ferrites[J]. Journal of Magnetism and Magnetic Materials, 1996, 160: 323-328.
[14]Zheng Xiaojing, Liu X E . A nonlinear constitutive model for Terfenol-D rods[J]. Journal of Applied Physics, 2005, 97(5): 61.
[15]王博文.超磁致伸缩材料制备与器件设计[M].北京: 冶金工业出版社, 2003.
[16]杨秋玉, 阮江军, 黄道春, 等. 基于振动信号时频图像识别的高压断路器分闸缓冲器状态评估[J]. 电工技术学报, 2019, 34(19): 4048-4057. Yang Qiuyu, Ruan Jiangjun, Huang Daochun, et al. Opening damper condition evaluation based on vibration time-frequency images for high-voltage circuit breakers[J]. Transaction of China Electrotechnical Society, 2019, 34(19): 4048-4057.
[17]郭凤仪, 陈明阳, 陈忠华, 等. 弓网滑动电接触摩擦力特性与建模研究[J]. 电工技术学报, 2018, 33(13): 2982-2990. Guo Fengyi, Chen Mingyang, Chen Zhonghua, et al. Research on friction characteristics and modeling of Pantograph-Catenary sliding electrical contact[J]. Transaction of China Electrotechnical Society, 2018, 33(13): 2982-2990.
[18]徐静妹, 李雷. 基于稀疏表示和支持向量机的人脸识别算法[J]. 计算机技术与发展, 2018, 28(2): 59-63. Xu Jingmei, Li Lei. A face recognition algorithm based on sparse representation and support vector machine[J]. Computer Technology and Development, 2018, 28(2): 59-63.
[19]王智勇, 郭凤仪, 冯晓丽, 等. 基于电流信号特征的弓网电弧识别方法[J]. 电工技术学报, 2018, 33(1): 82-91. Wang Zhiyong, Guo Fengyi, Feng Xiaoli, et al. Recognition method of pantograph arc based on current signal characteristics[J]. Transaction of China Electrotechnical Society, 2018, 33(1):82-91.
[20]杨秋玉, 阮江军, 黄道春, 等. 基于振动信号时频图像识别的高压断路器分闸缓冲器状态评估[J]. 电工技术学报, 2019, 34(19): 4048-4057. Yang Qiuyu, Ruan Jiangjun, Huang Daochun, et al. Opening damper condition evaluation based on vibration time-frequency images for high-voltage circuit breakers[J]. Transaction of China Electrotechnical Society, 2019, 34(19): 4048-4057.
[21]王栋悦, 谷怀广, 魏书荣, 等. 基于机电信号融合的DFIG定子绕组匝间短路故障诊断[J]. 电力系统自动化, 2020, 44(9): 171-180. Wang Dongyue, Gu Huaiguang, Wei Shurong, et al. Diagnosis of inter-turn short-circuit fault in stator windings of DFIG based on mechanical and electrical signal fusion[J]. Automation of Electric Power Systems, 2020, 44(9):171-180.
[22]姜涛, 王长江, 陈厚合, 等. 基于正则化投影孪生支持向量机的电力系统暂态稳定评估[J]. 电力系统自动化, 2019, 43(1): 141-151. Jiang Tao, Wang Changjiang, Chen Houhe, et al. Transient stability assessment of power system based on projection twin support vector machine with regularization[J]. Automation of Electric Power Systems, 2019, 43(1): 141-151.
[23]张婷婷, 于明, 李宾, 等. 基于Wavelet降噪和支持向量机的锂离子电池容量预测研究[J]. 电工技术学报, 2020, 35(14): 3126-3136. Zhang Tingting, Yu Ming, Li Bin, et al. Capacity prediction of lithium-ion batteries based on wavelet noise reduction and support vector machine[J]. Transaction of China Electrotechnical Society, 2020, 35(14): 3126-3136.
Object Recognition of Magnetostrictive Tactile Sensor Array Applied to Manipulator
Huang Shan1,2Wang Bowen1,2Zhao Zhizhong1,2Wang Liang1,2Weng Ling1,2
(1. State Key Laboratory of Reliability and Intelligentization of Electrical Equipment Hebei University of Technology Tianjin 300130 China 2. Key Laboratory of Electromagnetic Field and Electrical Apparatus Reliability of Hebei Province Hebei University of Technology Tianjin 300130 China)
The tactile sensor unit was designed and manufactured using the magnetostrictive material Galfenol, which was integrated into an array and installed on the two-finger manipulator. The tactile sensor unit force measurement model was established based on the electromagnetic principle, the inverse magnetostrictive effect and the Euler Bernoulli dynamics principle. The measuring range of the sensor unit is 0~3N. When the pressure is less than 1.5N, the sensitivity is 150mV/N. In the range of 1.5~3N, the sensitivity is about 103mV/N. It has higher sensitivity when measures lower static force, and has the characteristics of fast dynamic response and high sensitivity to dynamic force in the range of 2~4Hz. According to the measurement range of the manipulator, six kinds of beverage bottles with regular shapes were selected. The experimental system was built for collecting and saving data and testing the output characteristics of the sensor. The integrated sensor array can identify the selected sample well, and has higher accuracy for the sample filled with water. By selecting appropriate eigenvalues and applying support vector machine algorithm, the collected datas are classified by selecting different eigenvalues and the proportion of training sets and classification sets. According to the calculation, when three eigenvalues are selected and the ratio between training sets and classification sets is 9:1, the recognition rate is the highest, which is 87.5%.
Galfenol, tactile sensor array, support vector machine, object recognition
TP212
10.19595/j.cnki.1000-6753.tces.200556
国家自然科学基金(51777053, 51801053)和河北省自然科学基金(重点项目E2017202035, 青年项目E2019202315)资助项目。
2020-05-28
2020-07-07
黄 珊 女,1995年生,硕士,研究方向为触觉传感器和新型磁性材料与器件。E-mail:912103050@qq.com
王博文 男,1956年生,教授,博士生导师,研究方向为新型磁性材料与器件。E-mail:bwwang@hebut.edu.cn(通信作者)
(编辑 郭丽军)
