自动寻迹小车的设计与实现
2021-04-13张楚翘
张楚翘
(北京首都机场航空安保有限公司,中国 北京 100000)
1 总体方案设计
自动寻迹的智能小车的总体设计, 主要以STC89C52RC 为核心控制系统,RPR-220 光电探测器与LM393 电压比较器组成红外传感模块、L293D 驱动电机模块、稳压电源模块、行驶器机械系统组成。根据智能小车的功能实现,设计方案应该能够在小车启动电源后,小车自动行驶,车头底部红外光电二极管发出红外线,照射路面并反射的光线被光电二极管接收,二极管在电磁作用下产生电势,将光信号转化成电信号。智能小车在贴有1cm 宽度黑线的白色地面上行驶,由于黑色和白色对光线的反射系数不同,单片机内部程序通过判断接收到的反射光的强弱来确认黑色路线的位置。车前红外光电二极管发射和接收信号,信号传输到单片机,经过单片机小系统处理再控制电机使智能小车后退或转弯。
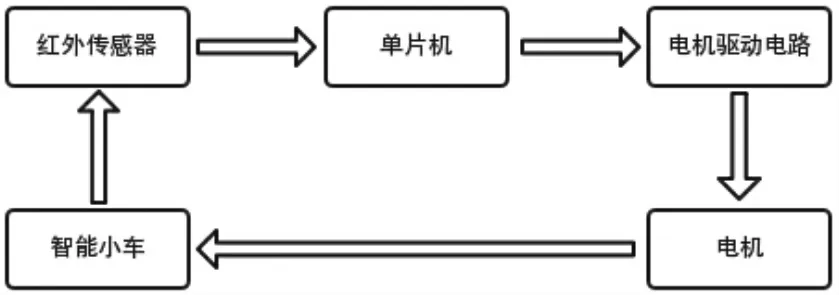
图1 总方案设计流程图
2 自动寻迹避障小车的硬件设计
2.1 核心控制系统
本次设计以STC89C52RC 为主要控制系统的核心, 采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、 随机存储器RAM、 只读存储器ROM、多种I/O 口、中断系统、定时器/计时器等功能集成到一块硅片上,构成一个小而完善的计算机系统。
通过电源通断电改变电路充放电状态,形成回路使单片机上电复位,返回初始的工作状态。 当程序崩溃或程序长时间失去响应时,微控制器看门狗模块将自动复位并重启微控制器。
晶体振荡器和电容组成的时钟电路,振荡器产生的是正弦波,形成时钟脉冲,在此条件下进行编码译码和指令的调取。
智能寻迹小车需要采用多开关量输入的复杂程序控制系统,通过各项硬件参数与所需达到的功能进行分析,实际工作频率可达48 MHz,用户应用空间为8K 字节,片内集成512 字节RAM,32 个通用I/O 口,复位后:P1/P2/P3/P4 为准双向/弱上拉,P0 端口为开漏输出当用作总线扩展时,无须添加上拉电阻。 当用作I/O 端口时,需要一个上拉电阻。 代码指令的兼容性非常强,速度快,耗能低,抗干扰并且价格低廉。

图2 总体硬件电路图
2.2 红外传感模块
采用3 对RPR-220 反射式红外二极管和接收管组合发射-接收器,固定于智能小车的底部前端。传感器是把被测量的光电变化于发出的辐射源,测量被测信息上的光波并进行调制,通过空间分布、相位、强度等发生的改变,将光信号转化为电信号,再由光电器件把电信号调制分离,得到可用信息。 考虑到本设计的场地和环境因素,探测红外信号,在光电探测器上要选用光敏电阻, 且要对准红外光照的有效位置,利用全部感光面。 灵敏度的选取确保输出强电信号,光信号的调制匹配动态参数, 输入电路保证转换系数、信噪比和动态响应,在额定条件下能够有效探测。
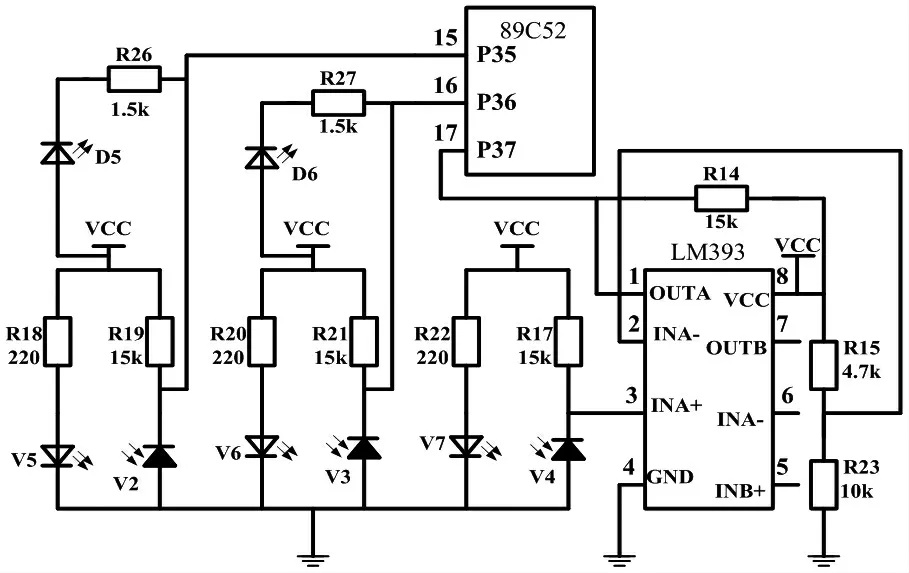
图3 红外传感模块电路图
V5 与V2、V6 与V3 组成两组红外发射接收对管,小车寻迹时轨道为黑色。
当小车沿着黑色道路行驶时,发射管发出的红外线被黑色轨道吸收, 接收管无法接收红外线照射,电路呈断路状态,单片机端15、16 输入高电平,电机正向转动,小车沿黑色道路向前移动。
当小车偏离黑色道路行驶时,发射管发出的红外线被白色地板反射, 接收管接收到红外线的反射光,电路呈通路状态,单片机15、16 输入低电平,控制一个电机反向转动或不转, 使小车自动进入轨道前进。左侧偏离,向右拐。
LM393 电压比较器由两个独立的高精度电压比较器组成的集成电路系统, 其具有低至2.0 mV 的低失调电压,用于实现宽电压范围。无论电源电压如何,电源消耗的电流都非常低,输出负载电阻可以连接到允许电源电压范围内的任何电源电压, 与VCC 端电压无关。 该输出可用作简单的接地SPS 开路(当不使用负载电阻时), 电流输出可能受驱动和器件的β 值限制。当达到极限电流(16 mA)时,输出晶体管将退出系统,输出电压将快速上升。 LM393 电压比较器主要用于限幅器,简单的模数转换器,脉冲发生器,方波发生器, 延迟发生器, 宽带压控振荡器,MOS 时钟定时器,多频振荡器和数字逻辑门电路。 LM393 设计用于直接连接TTL 和CMOS;当双电源提供电能时,它与MOS 逻辑兼容,与标准比较器相比,消耗供电量少,转换时间短。
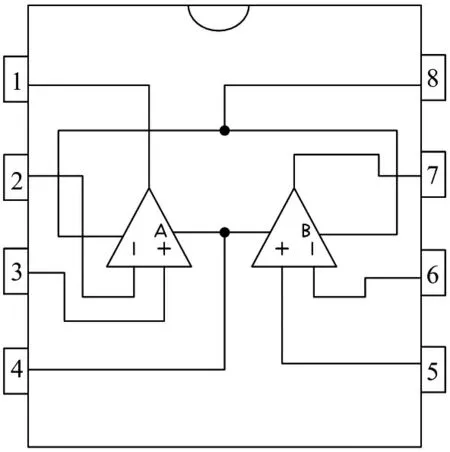
图4 LM393 功能框图
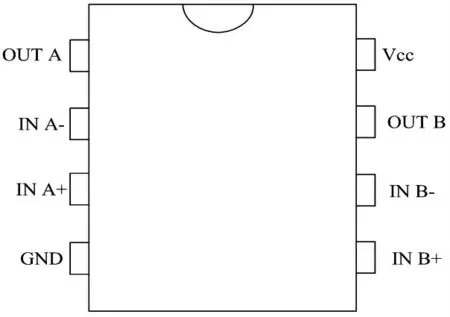
图5 LM393 管脚排列图解

表1 管脚排列表
LM393 双电压比较器的IN+同相输入端,IN-反相输入端,OUT 输出端。 电压比较器是模拟电路与数字电路的接口电路。 当输入电压IN+>IN-时,输出为高电平1。 当输入电压IN+<IN-时,输出为低电平0。
当智能小车行驶前方没有被红外探测到障碍物,红外发射管发射的红外线没有被反射,红外接收管接收不到红外线, 发射极和集电极都是反偏的状态,电压比较器的IN+≈VCC, 而其反相输入端输入电压为R15 与R23 分压值,IN-≈2/3 VCC,OUTA 输出为高电平,小车前进。
当智能小车行驶前方出现被红外探测到障碍物,红外发射管发射的红外线被反射,红外接收管接收到红外光,发射极和集电极都是导通的状态,电压比较器的IN+≈0, 而其反相输入端输入电压IN-≈2/3 VCC,OUTA 输出为低电平,小车先后退,再右转继续前进。
2.3 电机驱动模块
在实验型的机器人中使用的电动机通常工作在5-24 V。 根据型号、制造方法、价格等,它们的电流约为100 mA 至5 A。可以通过多种方式使用电机。一种方法是将其直接连接到电池,然后以特定方向以最大速度旋转,但实际上,本设计需要控制电机的通断电以及速度、方向和位置。必须使用控制器(逻辑电路或微控制器或PC 或计算机)来控制电机。但是微控制器的输出为5 V 和200 mA,无法旋转电机。 因此,需要中间电路将控制器连接到电机,称为驱动器。
德州仪器生产的L293D 驱动器, 电源电压范围:4.5~36 V, 独立输入逻辑电源内部ESD 保护热关断,通过L293D 功能的高噪声抗扰度输入取代每通道600 mA 的输出电流,每通道峰值输出电流1.2 A ,输出钳位二极管的电感瞬态抑制。
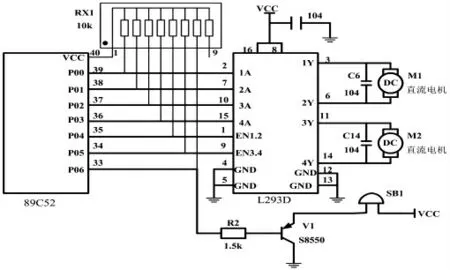
图6 电机驱动电路图
L293D 四路强电流H 桥驱动器。L293D 导通高达600 mA 的双向驱动电流和4.5~36 V 的电压。 该器件设计用于驱动感性负载继电器,电磁阀,直流双极步进和电机, 以及为其他强电流电压提供电源负载电压。兼容所有TTL 输入。每个输出都是推拉驱动电路,带有达林顿三极管和伪达林源。 启用1,2 个EN 驱动器和3,4 个EN 驱动器。 当使能端为高电平时,相关的驱动器被启用,它们的输出在其输入端处于有效和同相状态。 当使能输入为低电平时,这些驱动器被禁用,其输出在高阻抗状态下关闭。(1,2EN 是1 和2 的使能(高电平使能);3,4EN 是相同的)通过合适的数据输入,每对驱动器采用电磁阀的完整H 桥可逆驱动器的形式或电机应用。
L293D 外部输出必须对电感瞬态抑制,高速钳位二极管合理将VCC1 和VCC2 分开, 提供逻辑输入,以尽量减少设备功耗。 L293D 的工作温度起伏在0~70°C。
在热关断模式下,无论输入电平如何,输出都是高阻抗。

表2 工作条件
代数约定,其中最小的正(负)指定最低,用于此数据表的逻辑级别。
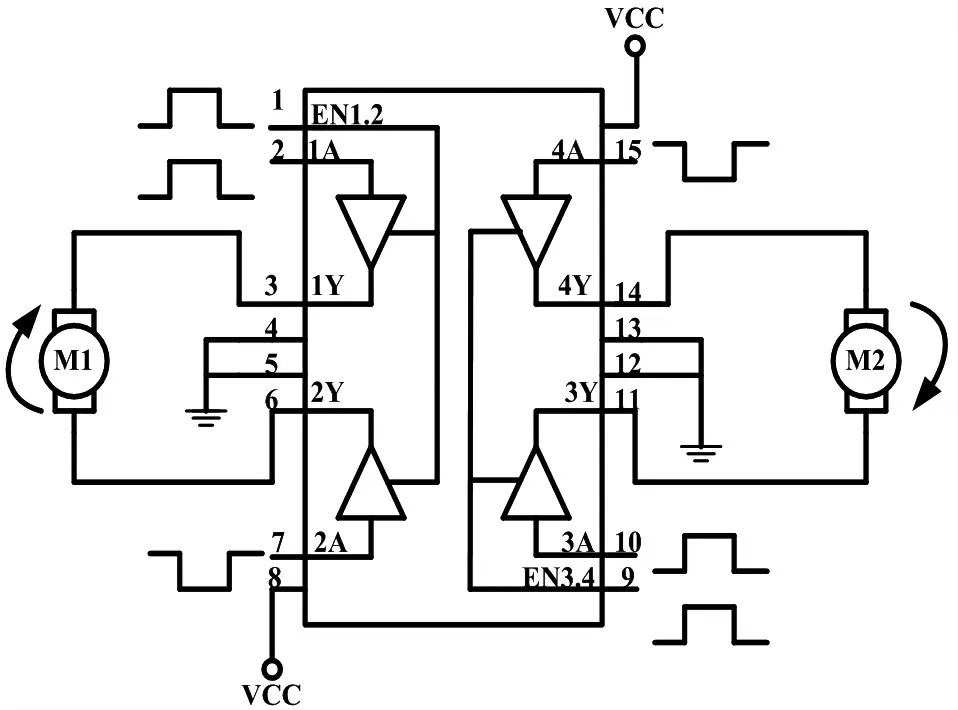
图7 L293D 内部结构
L293D 内部结构实际由四个三态门组成,高电平触发两个三态门中间的使能端, 使它们打开通路,双向传输信号,让电机正反向转动控制小车前轮。
在EN 输入高电平时,单片机的P0 口控制1A 与2A、3A 与4A 之间的高低电平,可以控制电机的正向转动与反向转动,通过改变前轮运行状态,使小车自由行驶。
2.4 电源模块
电源模块主要提供的支持是给智能小车提供有效电能, 本次设计采用4 节1.5 V 电池给系统供电,然后使用稳压芯片对电池电压进行降压到5 V 输出给微控制系统。将电池槽放置在车身上,提高稳定性,同时具有保护电池的目的,这样选择价格便宜,结构简单,容易获取。
2.5 机械系统
智能小车的机械系统大体上还是根据现代行驶工具为原型设计,要求该原型体型灵活轻巧、行驶稳定、构成简易,根据现代大多行驶器的设计且没有更多的特殊要求,本设计选择的是四轮式小车,前轮负责了转向和驱动的任务, 一个电机控制一个前轮,后轮连带使小车平稳行驶,为了稳定性和对称,中间连接一根轻型钢管, 并将焊接好的电路板放置于车身上,并进行加固,这样既稳定,连接电路板和元件之间的线路又不用太长。
3系统软件设计
由于本设计要通过软件程序控制实现自动寻迹,小车沿着黑线“轨道”进行行驶,并且在前方有障碍物的时候,通过红外光电传感器传输信号,单片机控制电机进行合理避障。
小车接入电源并开启开关后,3 组光电红外传感器开始工作,开始不停地扫描与探测器连接的单片机I/O 口,一旦检测到某个I/O 口有信号,进入判断程序过程,小车底下的两组光电红外传感器负责探测地面上的黑线,并自动寻迹。 小车前方的一组红外光电传感器负责判断小车行驶前方是否有障碍物,并自动避障。 提前定义好小车向前、后、左、右、停止,电机转动的方向实现对小车的控制。 逻辑示意图如图8 所示。
4 结论
本设计旨在设计和实现智能小车的自动寻迹和避障,是一个软硬件结合的系统设计,以硬件设计为主,核心的是硬件控制系统、自动寻迹、避障原理、红外光电传感器的功能及使用。通过充分了解核心控制系统所使用的元件和原理,以及自动寻迹和避障的原理, 平衡和解决小车设计使用时遇到的诸多困难,不仅深入了解自动寻迹小车的使用方向和设计原理,同时实现了自动寻迹小车的功能,达到了预期效果。

图8 软件逻辑示意图