基于机器视觉的预警机雷达结构件检测方法研究
2021-04-12丁宝平刘凌霄武斌功
程 鹏, 丁宝平, 郎 宁, 刘凌霄, 武斌功, 陈 桥
(1.中机生产力促进中心, 北京 100044; 2.中国电子科技集团公司 第三十八研究所, 安徽 合肥 230088)
0 引言
面对国家利益扩展、空间安全、海洋安全和网络安全等严峻情况, 军事电子设备能为国家和部队应对各种安全威胁,多样化的军事斗争任务提供支持,满足军种转型为信息化发展战略的要求, 适应高技术信息化作战条件下的作战风格变化,保证国家的安全利益不会受到损害。总的来说,军工电子设备力量是国家地位的重要支柱,是作为国家利益的重要保障,是赢得世界政治、军事和经济的一种重要保障。 在现代战争中,预警机经常用来对数十万平方公里的空中和海上目标实施警戒监视, 并指挥和控制对方的作战行动。 此外,除了预警飞机可以与电子战飞机合作以消除电子干扰外, 还可以作为信息综合处理中心和信息分发平台, 进行综合信息和联合战术信息分发等。 预警机搭载的远距离警戒雷达在高空探测各种目标,由于飞行高度较高,能够很大地克服由于地球的曲率和降落对长距离低海拔目标的阻挡作用。 因此,预警机雷达在低空突防目标时,搜索和预警能力要比地面雷达强,可以赢得有效的防御时间,从而赢得有效的防御。与地基雷达相比,预警机有良好的功能性,可以在作战地区灵活部署,为远海交战或进入敌方空间作战提供信息支持。预警机能够独立执行领空放哨任务, 也能与地面雷达站构成强大的警网。根据美国空军的计算,预警机巡逻率是一般战机20~30 倍的巡逻率。 由于预警机能够获取和控制自己的力量,能够全面、快速地获取信息,能够作战、协同交斗能力以及网络中心战的中央节点等优点, 因此被称为“空中帅府”。综上,预警机在国防安全方面担当了重要作用,在现代战争中,预警机一定要承担重大的使命,也是极其关键。
1 国内外研究现状
机器视觉就是模拟人的视觉,用来判断识别,机器视觉技术于1950 年左右出现,主要以模式统计方法为基础[1],即结合概率理论进行模式识别,当时的图像分析以二维形式进行分析,图像识别主要以二维形式进行。 60 年代以来,通过Robert 对“块世界”的研究,机器视觉进入了三维空间,标志着机器视觉进入了一个三维。 80 年代早期,Davidmarr[2]教授将计算机与心理物理、数学和神经心理结合起来,使机器视觉研究达到了一个新高度,他的理论也为当时许多研究者提供了一种新的观点。 直到上世纪90年代,随着电脑等高科技处理工具的迅速发展,同时还为机器视觉的发展创造了很好的条件[3]。自21 世纪以来,机器视觉在人们的日常生活中应用到了各个领域, 开启了机器视觉应用的时代。 将机器视觉应用于产品的质量检测也是其主要发展趋势之一, 机器视觉测量系统随之而产生,测量系统的性能和它的硬件及算法有直接的联系;测量系统的应用范围在不断扩大,在生活、工业众多领域出现了机器视觉测量系统的影子, 而且有的系统不仅能实现测量而且还可以起到控制的作用, 大大方便了人们的日常生活。
机器视觉技术采用视觉方法和图像处理结合, 实现了检测和量度的,集成了硬件、软件,并在相机配合下能够自行检测,这样就明显得提升生产方面的效率,实现了检测的智能化。 德国提出的4.0 工业方式意味着一种智能和信息化工业生产的形成。 中国提出了 “中国制造2025”[4],建设智能工厂,加强获取信息和处理信息的智能性。 在中国,机器视觉技术广泛的被应用于智能设备,如工业机器人检测[5]等,机器视觉应用也从低端向高端转移,实现了在线和高精度测量[4,7]。由于以机器视觉为基础的研究方法高精度,效率好,实时性良好,其发展情况正在稳步变好。机器视觉增加了机器的视觉功能,并在视觉软件或图像处理软件等配合下实现工业目标。 将机器视觉介入检测领域,能够实时进行高精度测量[4,6],远高于人工处理的速度。 将机器视觉技术划分为三维信息重建和通用的视觉信息系统,即机器视觉系统的功能类似于人的视觉功能,如智能机器人。利用视觉测量法可以明显地提高测量速度,节省了大量人工测量所占据的时间,其精确度远高于人工测量所占据的精确度,生产费用降低,因此在大量工业生产中机器视觉技术将发挥重要作用[6,7]。
典型的机械视觉系统有:工控器、相机、镜头、光源,运动控制系统,图像处理软件等一定机械结构,见参考文献[8,9]。 其运作步骤如下:第一步,通过摄像机获得产品的目标图片, 然后将目标图像由模拟信号变换为数字讯号;第二步,将数字信号发送给图像处理软件,然后根据整个或局部像素的高低,特殊形状,突出色彩甚至是明显的噪声,通过一系列方法提取产品目标的特点,最后按输出结果执行下一步的操作[10,11]。机器视觉是一门综合性技术,其中包括:数字图像处理技术、光学工程技术、计算机技术、传感器技术、机械工程技术、自动化技术等[12,13]。
在现代工业生产中,所有的步骤是密切相关的,任何步骤都没有使用先进工艺,将会成为产业制造的屏障。零件检查是所有精密部件的生产过程中必须经历的一个步骤,同时也是质量的保证关键。基于机器视觉的尺寸测量方法,在过去取得了长足的进展,是精密度测量技术不可分割的一个组成部分。
2 检测方法
机器视觉技术是利用视觉的方法与图像处理相结合来实现检测与测量的, 针对预警机雷达结构件常见的孔、槽类特征,对检测算法进行设计,算法主要包括:二值化处理、形态学滤波、双边、边缘提取、 最小二乘拟合等步骤。
2.1 视觉检测方案设计

图1 自主研发预警机雷达结构件检测平台Fig.1 Detection platform for radar structural parts of early warning aircraft
考虑待测零件结构特征、 加工工艺特点、操作人员的方便性和舒适性,兼顾设备成本、人力成本、能源成本、场地成本、管理成本以及设备柔性等因素提出一种基于多传感器信息融合的预警机雷达结构件检测平台。 以三坐标测量仪为主体,搭载触针,白光共聚焦传感器、工业相机三种传感器,实现预警机雷达结构件的快速测量。本文算法在此平台上进行测试实验,检测平台配备1 亿像素工业相机进行图像采集, 选择焦距为170mm 施耐德工业镜头。相机工作距离设为WD=100mm,相机视野范围FOV=25mm×20mm,相机感光靶面尺寸H×V=43.80mm×32.87mm,单像素物理尺寸为0.0018mm。
2.2 算法原理及流程
算法流程如图2 所示,针对通孔、盲孔等圆形特征,视觉测量算法流程如下:(1) 设置阈值进行二值化提取;(2)取反获得目标区域;(3)降噪去除多余噪声;(4)利用canny 算子提取目标区域边缘;(5) 利用最小二乘算法进行圆拟合。 拟合过程如下:首先通过式(1)建立圆方程,(x,y)代表边缘点,(xc,yc)代表圆心坐标,R 为圆孔直径,其次通过式(2),(3),(4)将方程转化为函数求解过程,分别通过(6)~(14)计算函数偏导值,最终求取得到拟合圆的圆心坐标及直径。
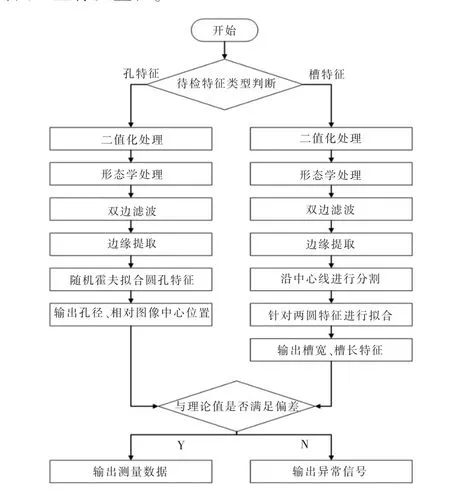
图2 检测流程Fig.2 Algorithm detection process
槽类特征检测流程与类检测特征类似: ①设置阈值进行二值化提取;②取反获得目标区域;③降噪去除多余噪声;④提取目标区域边缘;⑤向指定方向投影;⑥去除干扰边缘;⑦利用最小二乘算法拟合;⑧圆心距与两半径之和即为槽长,拟合得到的圆直径即为槽宽。

3 实验分析
系统及算法设计完成后,利用C 语言结合opencv 算法库编写程序并实现运算, 选取图3 中2 种零件上的7种特征进行尺寸测量试验。 试验结果如表1 所示。
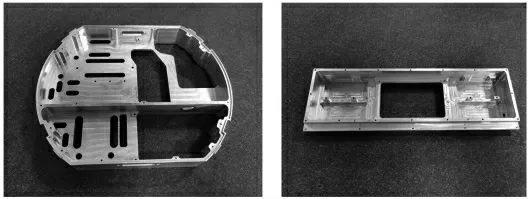
图3 预警机雷达结构件Fig.3 Radar structural parts of early warning aircraft

表1 实验结果(单位:毫米mm)Tab.1 Experimental results(unit:mm)
图4、图5 分别对结构件表面槽、孔检测过程进行了展示,实验证明,本文提出的预警机结构件尺寸测量算法测量精度均在在0.01mm 范围以内,且可具有较好的抗噪能力。
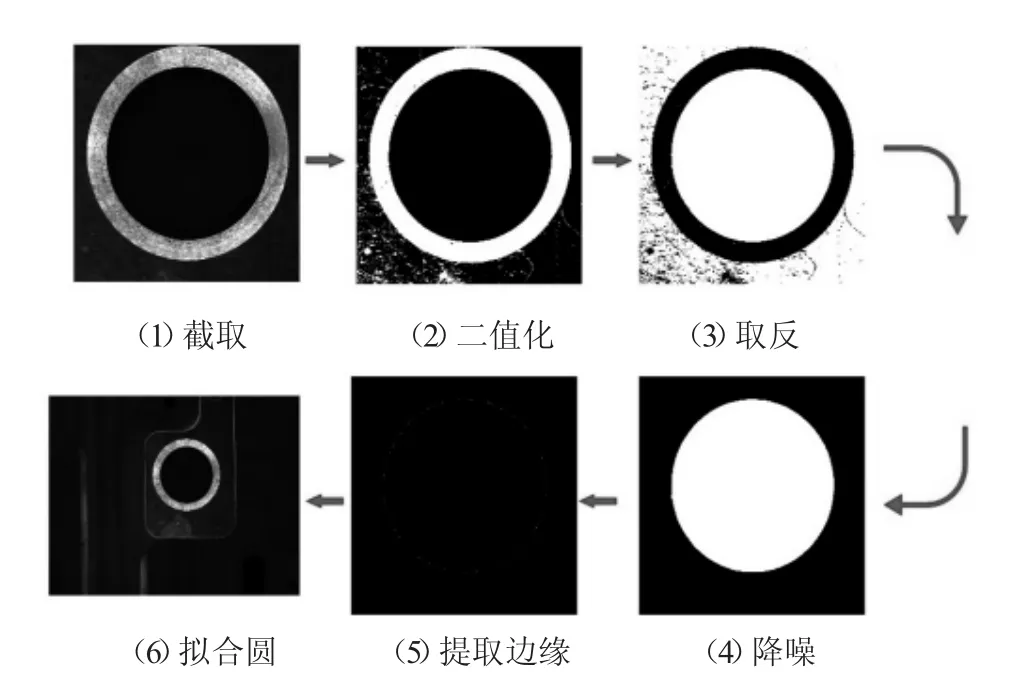
图4 结构件孔检测过程图Fig.4 Inspection process chart of structural part hole

图5 结构件槽特征检测过程图Fig.5 Process chart of structural groove feature detection
4 结论
本文为解决预警机雷达结构件尺寸测量的问题,采用机器视觉技术采集图像,经过二值化处理、腐蚀和膨胀处理、边缘提取、最小二乘拟合等步骤实现孔、槽的特征值提取, 并在在团队自主开发的实验设备上进行试验验证。 结果显示,它可以准确实现结构件的尺寸测量。 该系统也可以有效应用到其他小型零件的尺寸检测中, 也可以为其他系统的应用开发提供借鉴。