分类垃圾智能运输倾倒车控制系统的设计
2021-04-11德州学院宋亮亮
德州学院 宋亮亮 刘 伟
近年来,随着我国对垃圾分类处理重视程度的提高,与之相对应的垃圾处理站内对设备智能化的要求越来越高。本设计是一款可识别的垃圾种类并能根据不同种类进行运输路径选择投放,做到分类垃圾合理运输和处理的垃圾分类运输倾倒车的控制系统,系统具有识别垃圾种类,正确选择不同种类垃圾的运输路径,最后完成精准倾倒的功能。系统的整体稳定好,实现垃圾处理站内,能够完成垃圾分类投放的任务,同时也大大提高了垃圾分类运输处理的效率,实现垃圾分类处理装置的智能化。
近几年来,随着垃圾分类处理工作开始从点到面逐步推广,对分类垃圾的运输、处理的工作量也会大大提高,设计一款可以识别分类垃圾,并且将不同垃圾进行运输倾倒的智能小车就可以有效减少劳动强度,提高垃圾分类效率,使垃圾站更加智能化。
1 智能运输车的工作流程
运输车通过扫描装置对垃圾箱上的分类标识进行扫描,并把信息传输到PLC上,PLC对信息进行处理,并下达装车指令,装车完毕后,运输车通过电磁导航运输到指定位置,到达后站标传感器得到信号,PLC处理分析接受到的信息,给运输车驱动电机和倾倒电机信号,运输车停车,倾倒电机开始倾倒,完成后运输车驱动电机反转原路返回。
2 PLC的选型
智能运输车采用西门子公司生产的S7-200 SMART ST20,其I/O点分配表如表1所示。
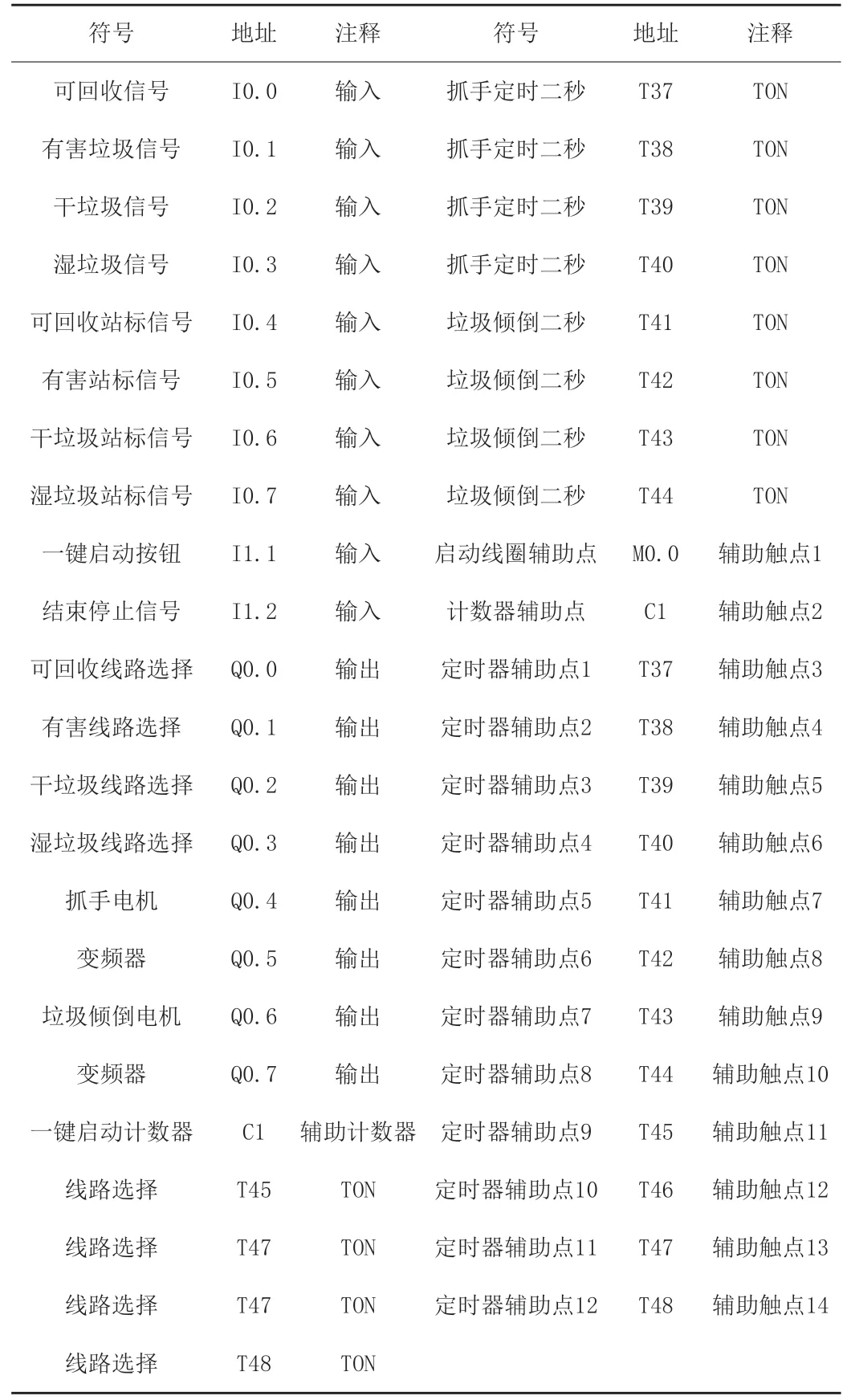
表1 PLC的相关分配
PLC的外部接线图如图1所示。

图1 S7-200 MART T20外部接线图
3 分类垃圾智能运输车硬件选择
智能运输车的硬件主要有:传感器;电机;变频器。本设计采用磁导航传感器I/O接口NPN型;地标传感器采用I/O接口NPN型;电机采用直流永磁同步电机和直流减速电机;变频器采用海浦蒙特变频器系列。
4 分类垃圾智能运输车软件设计
智能运输车采用的是STEP 7-MicroWIN SMART软件,程序流程如图2所示。

图2 程序流程图
4.1 分类垃圾智能运输车程序仿真
当按下启动按钮时I1.1时候,运输车启动,检测到可回收信号I1.0时,小车选择一号线路行驶,如图3所示。

图3 仿真调试1
运输车运输到指定位置,然后进行垃圾倾倒处理并原路返回,如图4所示。

图4 仿真调试
4.2 分类垃圾智能运输车的组态仿真
分类垃圾智能运输车仿真用的组态王软件,模拟分类垃圾智能运输车流程动画显示。按下启动,识别垃圾类型,运输车启动,装车灯亮表示抓手电机在装车,如图5所示。运输到指定位置,运输车停止,卸车灯亮,卸载电机在卸载垃圾,如图6所示。
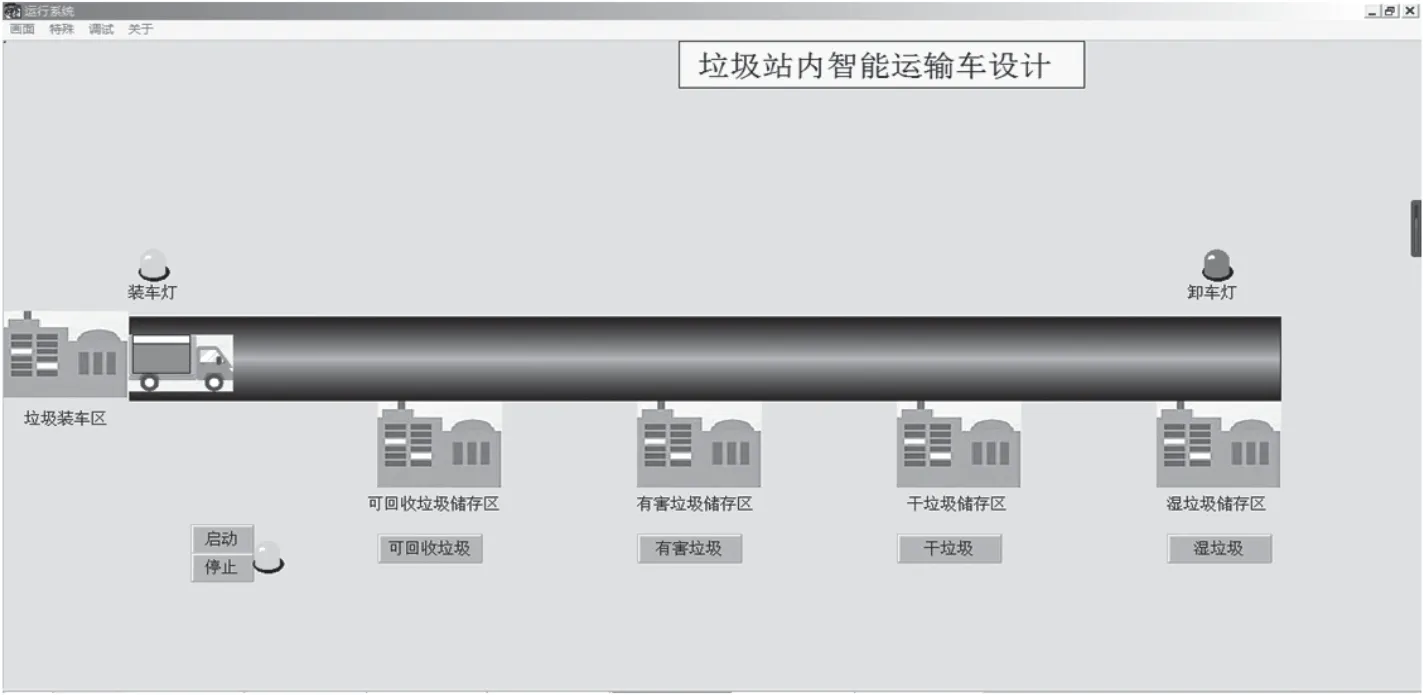
图5 启动开始画面
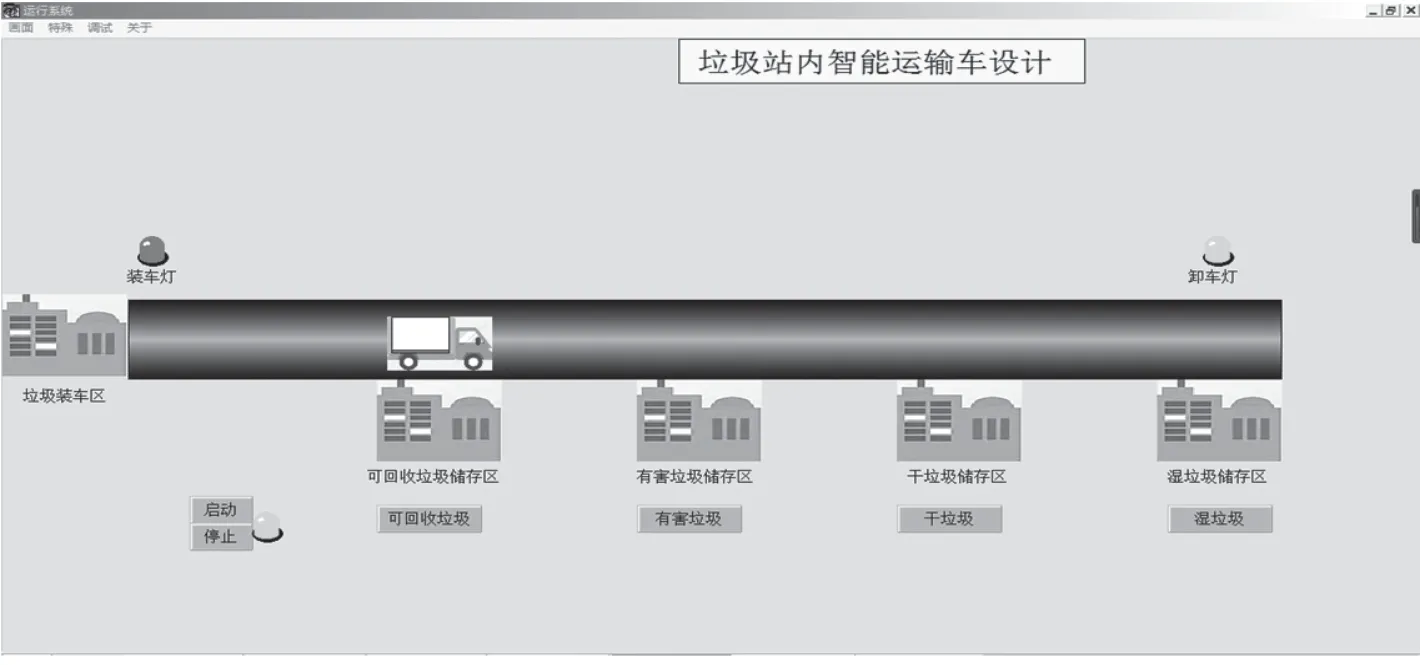
图6 到点停止画面
本设计把PLC和AVG小车结合,使得分类垃圾智能运输车更加灵活智能,基本达到设计的目的。
