纯电动汽车制动能量回收控制策略及仿真分析
2021-04-09王若飞郭广曾王世良
王若飞 郭广曾 王世良


摘 要:整车控制系统是车辆的核心控制部分,其既要对驾驶员的操纵意图进行识别和判断,又要对整车运行时的关键参数进行监测和控制,同时,还要对整车的能量需求进行管理和协调。在车辆制动工况下,如果进行制动能量的回收控制,可以有效的延长续驶里程,但电动汽车在进行回馈制动时,电制动会和机械制动系统相互耦合,这一问题解决的好坏,也会影响到车辆行使的安全性。本文阐述了对制动模式下机械制与电机再生制动的协调开展研究,目标是进一步保证车辆行驶的安全性和舒适性,提高制动时的能量回收效率。
关键词:整车控制器 能量回收 仿真
1 研究方案及研究方法
本位重点对再生制动时的控制策略进行研究。分别对这两个研究内容进行模型分析,设计控制策略,利用仿真分析软件,对所设计的策略进行仿真分析和验证。具体方法如下:
1)建立研究对象制动时的纵向动力学数学模型,设计再生制动力分配的模糊控制器;
2)在matlab软件中,应用粒子群算法,对模糊控制器的模糊规则进行优化;
3)对优化后的模糊控制器,设计不同的制动工况,进行离线仿真验证;
4)写控制代码,下载到控制器的工程样机中,在硬件在环仿真平台上,对控制算法进行半实物仿真验证。
2 研究过程及研究结果
2.1 再生制动控制策略设计
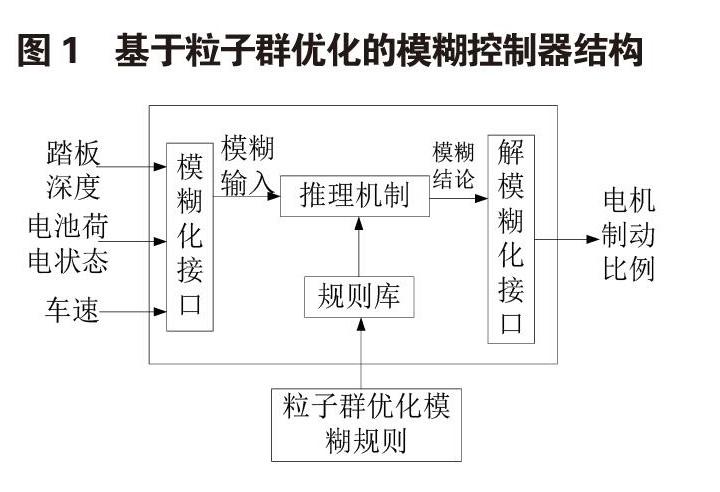
再生制动控制的原则是保证汽车制动稳定性的同时,综合考虑能量回收效率。针对前轮驱动电动车辆,液压控制单元(ABS)采集到的制动踏板位置、轮速等信息,通过车载网络传递给整车控制器(VCU),VCU根据接收到的信息,结合动力电池组、驱动电机的状态信息,计算出前轮的制动回收扭矩,通过车载网络发送到电机控制器(此时没有考虑驱动扭矩安全监控模块)。但电动汽车在进行再生制动时,会和车辆的机械制动系统相互耦合,为解决这一机电耦合问题,设计了再生制动扭矩模糊控制器,该控制器的输入量为制动踏板深度,电池荷电状态(SOC),车速三个参数,输出量为电机制动的参与程度,即电机制动力矩占最大可用电机制动力矩的比例,推理方法选用Mamdani推理。语言变量的选取设计上,将制动踏板深度输入量分为5个模糊子集{VS,S,M,B,VB},将电池SOC输入量分为5个模糊子集{VL,L,M,H,VH},考虑到车速与制动能量回收的关系,将车速分为7个模糊子集{VL,L,LM,M,HM,H,VH};电机再生制动力的比例为模糊控制器输出量,分为11个模糊子集{KM0,KM1,KM2,KM3,KM4,KM5,KM6,KM7,KM8,,KM9,KM10}。
2.2 模糊规则的优化
模糊控制器鲁棒性强,适应非线性时变系统,能够较好地控制协调机械制动和电机制动,但电机的再生制动扭矩受到电池充电功率、ECE法规以及电机特性的限制,很难在满足制动稳定性的前提下,制订能量回收的最优模糊规则。而粒子群算法,作为一种群智能的全局优化方法,迭代过程简单,不需要交叉变异等复杂的进化操作,且算法本身具有全局寻优的能力,可以有效提高模糊控制器的设计效率。因此,选用粒子群算法优化模糊控制器的模糊规则。首先需要把整车优化目标有关的控制变量集中编码,由于车速很低与电池荷电状态很高时不回收制动能量,因此所需优化的模糊规则为120个。然后,利用粒子群算法进行模糊规则的优化整定,将需要优化的模糊控制参数编码成粒子码串[x1,x2,…,x119,x120]。粒子的每个变量均用整数表示,变量取值范围为1-11。
将再生制动回收的能量作为优化目标函数,制动稳定性与电池的充電功率限制作为约束条件,则适应度函数为:
其中xi为通过约束条件的模糊规则。约束条件为:
式中,Tm min、Tm max分别为电机的最小和最大转矩,ωm min、ωm max为电机的最小和最大转速,Ichg min、Ichg max为电池的最小和最大充电电流,SOCmin、SOCmax为电池的最小和最大荷电状态,Pchg_max为电池允许的最大充电功率。
在Matlab软件平台中,编写m文件,利用粒子群优化算法,通过迭代寻找最优解,从而实现对模糊控制器规则库的优化。最后得到的控制器结构如图1所示。
2.3 离线仿真分析
在Simulink软件环境中,搭建优化后的模块控制器模块,将其嵌入到图8所示的整车扭矩安全监控仿真模型中,制动工况选择初始车速分别为90Km/h,60Km/h,30Km/h,初始荷电状态为20%,50%,80%,进行离线仿真,得到如图2、3所示的结果。其中,图2为在一般制动工况下随时间的变化,车速、制动减速度、利用附着系数的变化情况。仿真结果表明,电机参与制动时,地面附着系数利用不充分,但依然满足ECE法规要求。图3为不同初始SOC下的电机制动功率,可以看出在SOC偏低时,允许充电功率比较高,实际再生制动回收的功率也较大,随着SOC的上升,电池组允许的充电功率也有所下降,实际制动回收的功率也相对下降。模糊控制器控制的电机制动功率低于电池峰值充电功率,在提高制动能量回收效率的同时,避免了可能由于充电功率较高对电池的损害。
2.4 硬件在环仿真
为进一步验证整车控制器(VCU)在制动工况下与机械制动的协调控制,根据再生制动时的扭矩控制策略,编写了控制代码,下载到一整车控制器的工程样机中,并搭建了一硬件在环仿真实验平台(如图4所示),实验平台中用到的设备有:1、驾驶模拟机,其功能是模仿驾驶环境,提供驾驶信息;2、整车控制单元(VCU),运行整车的扭矩控制策略;3、dSPACE仿真器,模仿整车行使工况,为VCU提供传感器信号;4、PC机,运行仿真监控软件ControlDesk,观测记录相关参数信号。
图5是再生制动时,制动主缸压力、车速与轮速以及机械制动与电制动的变化曲线,从图中可以看出,制动强度前期较弱,主轮缸中的压力上升缓慢,后期制动强度加强,主轮缸中的压力上升较快,在缓慢制动过程中,再生制动扭矩缓满上升,符合驾驶员的期望,车速和轮速也都没有明显的波动,减速过程比较平缓。但随着制动强度的加强,约在6.2秒,模拟的ABS模块动作,前轮制动轮缸中出现减压,此时,再生制动扭矩迅速减至0,该现象符合当ABS触发后,电机的再生制动退出,车辆切换到纯机械制动的要求。
3 结论
本文重点对再生制动时的扭矩控制策略进行了研究,通过模型分析、建模仿真,对所设计的控制方案、控制策略进行了验证,仿真结果符合期望要求,实现了所设计系统的功能。对于再生制动的扭矩控制策略,虽然控制策略满足了设计功能,但从结果看,离线仿真和硬件在环仿真的差别还是较大的,要进一步检验能量回收效率和制动扭矩协调功能,需要进行实物验证。另外,为了保证制动安全,制动扭矩的控制策略是一当ABS系统触发,电制动就退出,从提高制动回收效率的角度,这一控制策略可以进一步研究的。
参考文献:
[1]基于Simulink-Cruise联合仿真的制动能量回收系统研究[J].杨海圣,姬芬竹,杨世春.控制工程.2018(06).
[2]电动汽车再生制动能量回收最优控制策略[J].郭金刚,董昊轩,盛伟辉,涂超.江苏大学学报(自然科学版).2018(02).
[3]基于主动转向与主动制动的智能车路径跟踪[J].程硕,李亮,陈百鸣,王翔宇.同济大学学报(自然科学版).2017(S1).
[4]纯电动汽车制动能量回收评价方法研究[J]. 初亮,刘达亮,刘宏伟,蔡健伟,赵迪.汽车工程.2017(04).
